

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
电子说
描述
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
基于整个智能制造的发展,移动机器人导航技术大致可分为以下几种:
1/激光导航
激光导航分为激光反光板导航与激光自然导航两种方式:
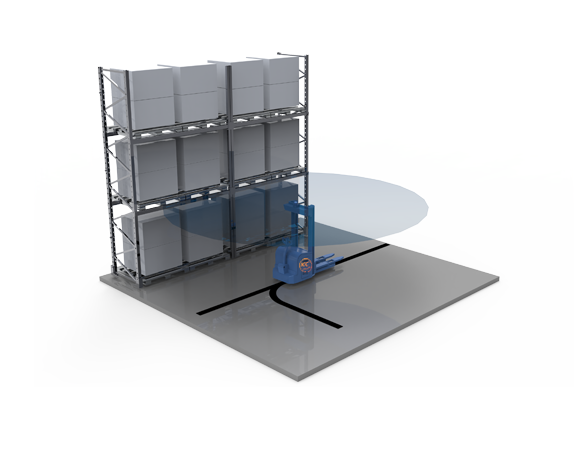
①激光自然导航
过辅助导航标志(二维码、反射板等),而是通过工作场景中的自然环境。如:仓库中的柱子、墙面等作为定位参照物以实现定位导航。

②激光反射板导航
激光反光板导航是在AGV 行驶路径的周围安装位置精确的反射板,激光扫描器安装在 AGV 车体上。激光扫描器随 AGV 的行走的同时发出激光束,发出的激光束被沿 AGV 行驶路径铺设的多组反射板直接反射回来,触发控制器记录旋转激光头遇到反射板时的角度。控制器根据这些角度值与实际的这组反光板的位置相匹配,计算出 AGV 的绝对坐标,基于这样的原理实现非常精确的激光导引。
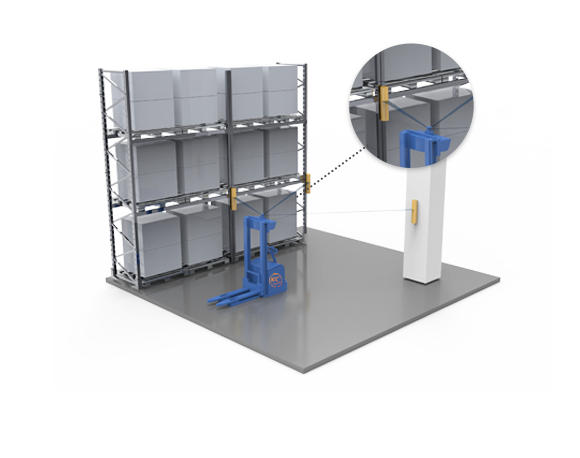
激光导航优点:激光导航的方式使得AGV能够灵活规划路径,定位准确,精度高,行驶路径灵活多变,施工较为方方便,能够适应各种使用环境。
2/二维码导航
二维码导航属于视觉识别,实现原理是在地面铺设二维码阵列,通过移动机器人(AGV/AMR)下方的相机扫描二维码实现机器人的定位。
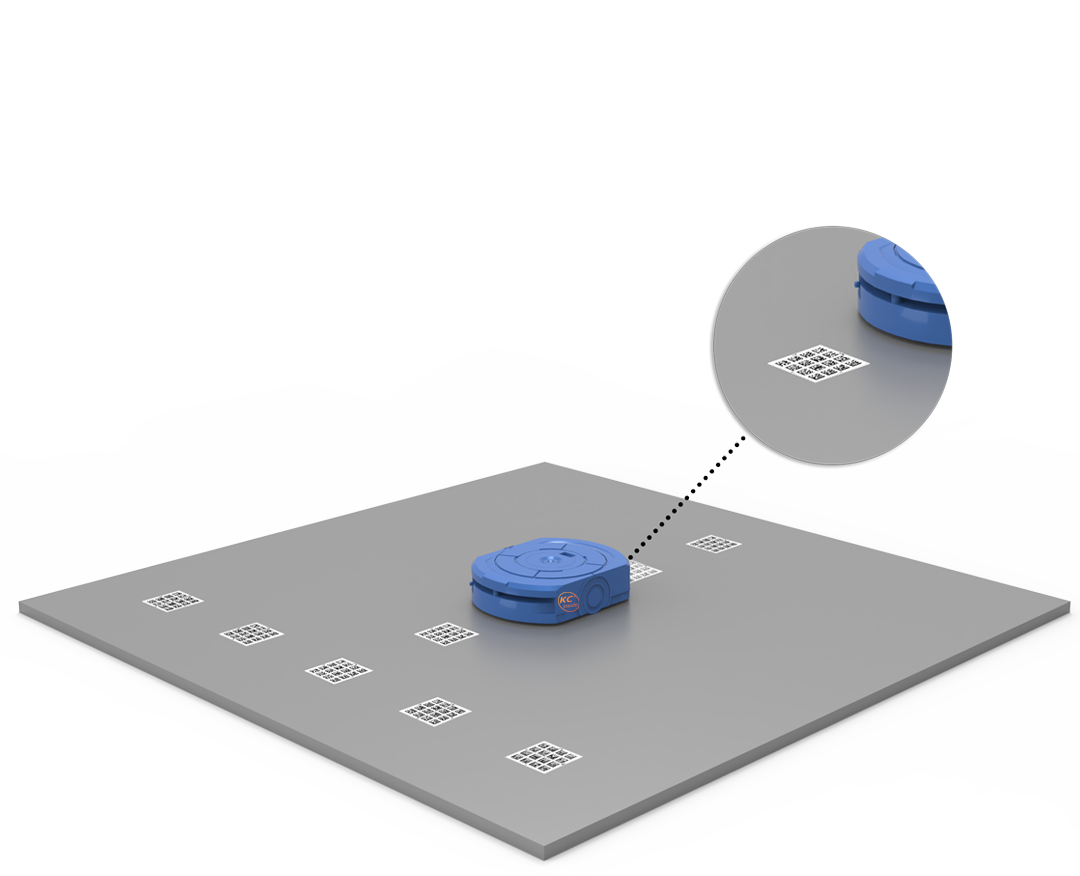
二维码导航优点:位置准确,小巧玲珑,铺设、更换路径更容易,控制通讯方便,不必担心声光干扰。
3/磁导航
磁导航的原理是在移动机器人(AGV/AMR)行驶路径上埋置金属线,给金属线加载导航频率,通过机器人上的电磁感应线圈来感应磁场的强弱,进行识别和跟踪。
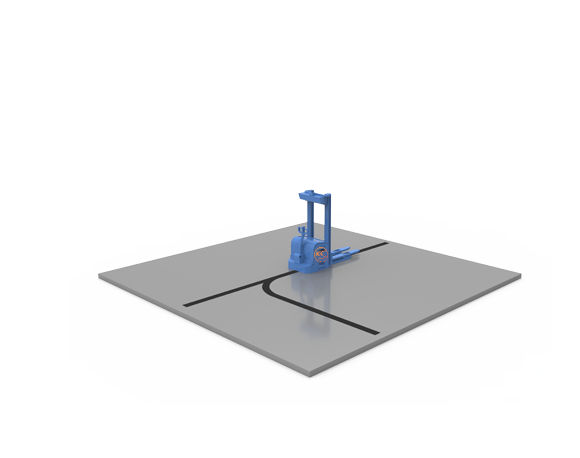
磁导航优点:简单稳定且成本不高,技术成熟可靠,对于声光无干扰性,AGV运行线路明显性。线路二次变更容易、变更成本低、变更周期短。
4/色带导航
色带导航通过视觉传感器(或组合式的色标传感器),检测事先铺设在地面的色带与移动机器人(AGV/AMR)的相对位置,从而使小车沿既定路线(色带)行驶。
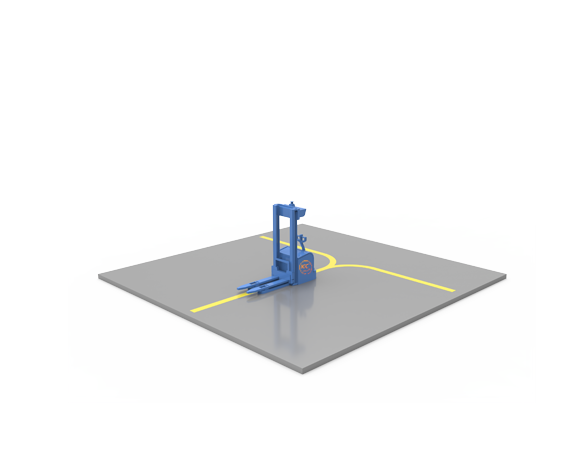
色带导航优点:铺设容易改路径,成本低.
5/GNSS导航
通过GNSS导航模块接收GPS卫星信号进行导航定位。一般采用伪距差分动态定位法,用基准接收机和动态接收机共同观测4颗GPS卫星,按照一定的算法即可求出某时某刻机器人的三维位置坐标。差分动态定位消除了星钟误差,对于在距离基准站1000km的用户,可以消除星钟误差和对流层引起的误差,因而可以显着提高动态定位精度。
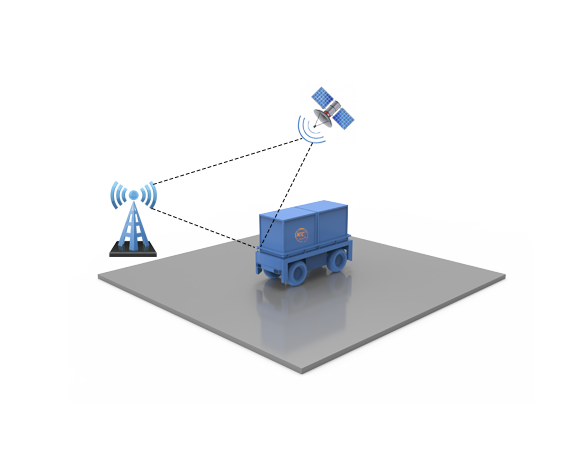
GNSS导航优点:通常用于室外远距离的跟踪和制导,其精度取决于卫星在空中的固定精度和数量,以及控制对象周围环境等因素。
6/混合导航
混合导航是多种导航的集合体,该导航方式是根据现场环境的变化应运而生的。由于现场环境的变化导致某种导航暂时无法满足要求,进而切换到另一种导航方式继续满足AGV连续运行。
混合导航优点:二维码+激光,激光+磁等多种方式,可适应各种复杂场景,定位精度高。
审核编辑:汤梓红
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 807
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2162
-
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术2023-06-21 3022
-
【科普】干货!带你从0了解移动机器人(一)—— 什么是移动机器人2023-03-13 5045
-
差速移动机器人轨迹跟踪控制方法2021-09-01 1906
-
什么是移动机器人软硬件系统问题2021-08-06 2515
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2986
-
如何实现移动机器人的设计?2020-11-23 3306
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3797
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4130
-
移动机器人的分类与移动机器人技术研究现状和未来发展的分析2017-09-16 1618
-
Labview My RIO 移动机器人2016-08-21 13631
-
移动机器人导航2016-05-23 1107
-
资料:移动机器人能否自动充电?2016-01-20 5177
全部0条评论

快来发表一下你的评论吧 !
