

干货 | 虹科KPA MoDK运行环境与搭建步骤(1)——运行环境简介
描述
“虹科” 工业自动化
本系列文章旨在帮助读者对虹科KPA Automation体系进行一个简要的理解,并且能使用MoDK进行快速的上手操作,包括:虹科KPA Automation、虹科KPA MoDK简介,虹科KPA MoDK的运行环境搭建与例程测试。本文档搭建的虹科KPA MoDK运行环境,是基于Win10,并且是以C/C++为开发语言进行的
01 虹科KPA Automation运行体系
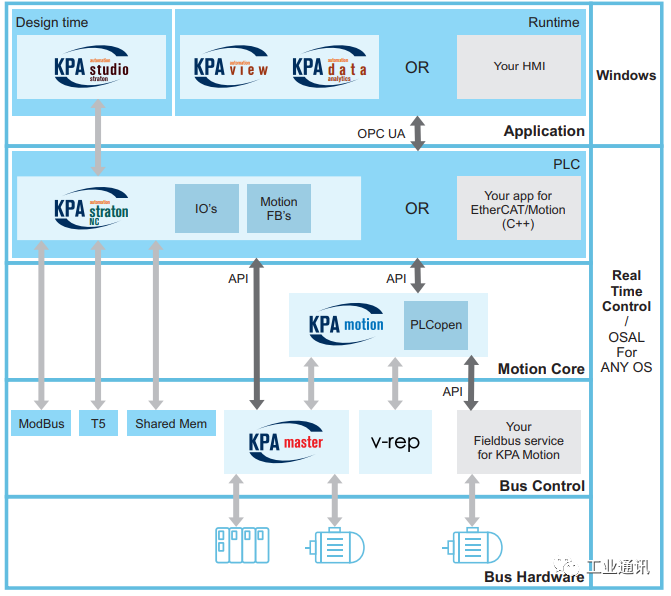
虹科KPA Automation是一套完整的控制体系,由几个层级组成,自下而上分别是:设备层、总线层、控制层、应用层。每一层功能相对独立,并提供层间交互的接口,高层的内容可以使用您自己的方法实现,如总线层使用KPA Master,控制层使用您自己的控制器。但是低层的内容不能被替换,如使用KPA motion而不使用KPA Master,这种方式不可行。
每一层的作用简要如下:
设备层
实际的被控设备,由总线层进行数据收发。
总线层
接收来自控制层/设备层的数据,并转发至设备层/控制层,目前支持的总线协议有:EtherCAT、ModBus、CAN、CANopen、PROFIBUS。具体支持的协议类型,还与控制层具体所选的控制器相关。MoDK也支持使用VREP机器人仿真平台。
控制层
控制器所在的层级,可灵活选择多种类型的控制器。可以选择KPA Straton,结合MoDK/MDK时也可以选用C/C++应用程序。
应用层
主要用于数据的采集、监控和分析。
02 虹科KPA MoDK简介
虹科KPA MoDK在虹科KPA Automation控制体系中处于控制层一级,是控制系统中可选的一个模块。结合虹科KPA Straton时,使用的是5种标准PLC语言开发,MoDK以功能块的形式呈现;直接使用C/C++进行开发时,MoDK则以独立的开发包/库形式呈现。
MoDK的功能块/函数接口完全符合PLCopen part1/part4标准,使用Straton进行开发时,只需按顺序调用功能块即可:初始化环境→初始化轴实例→运动控制;使用C/C++开发时的流程也类似,但是每一步的API调用则要遵循以下顺序:功能块变量声明→功能块实体创建→调用功能块。具体的流程将在后续更新中详细阐述。
虹科KPA MoDK目前支持的PLCopen运动控制函数如下:
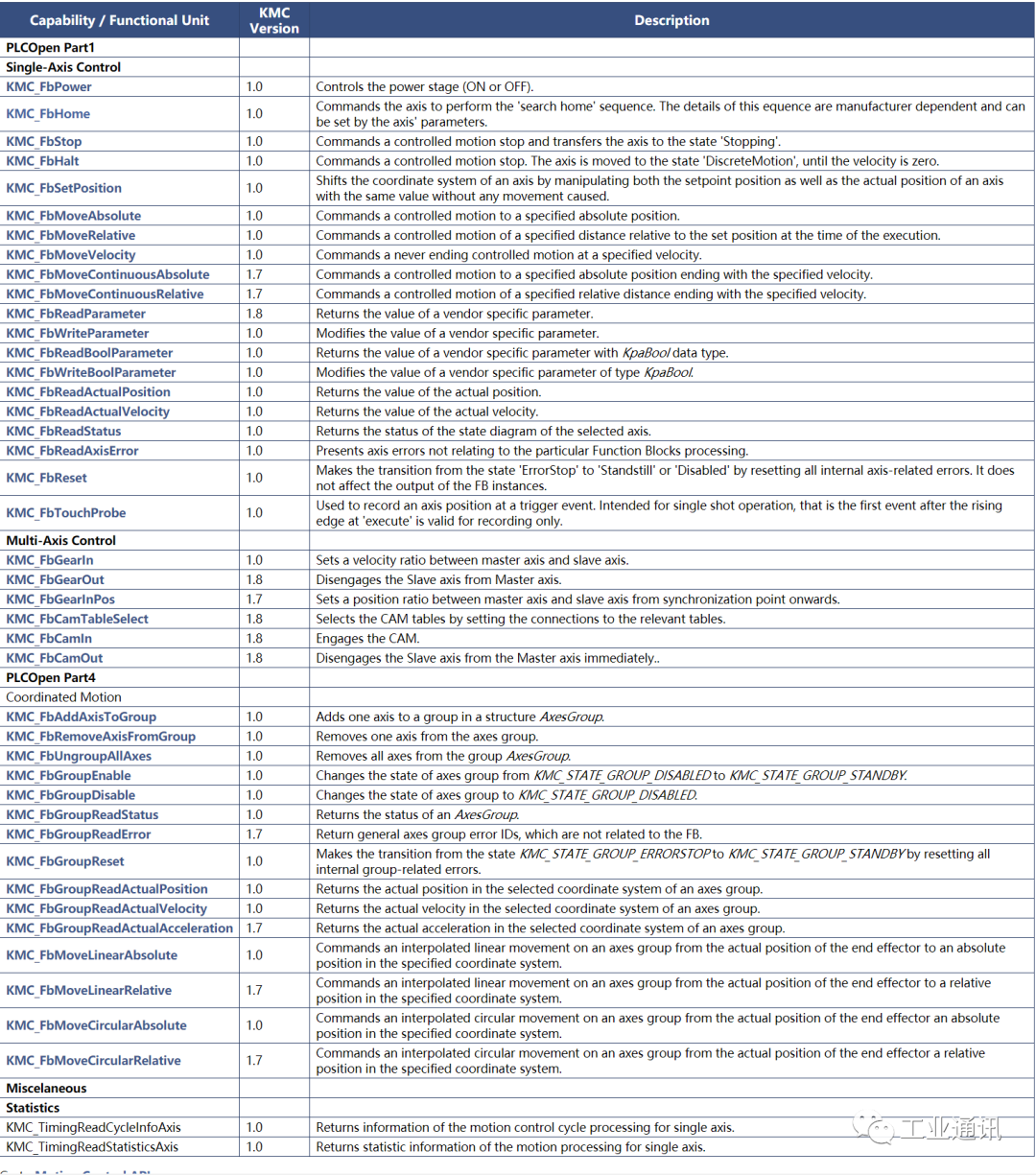 可以看到MoDK涵盖了PLCopen part1/part4中的绝大多数功能块,并有性能优异的路径生成器,使得控制循环能低于1ms,能满足绝大多数的应用需求。
可以看到MoDK涵盖了PLCopen part1/part4中的绝大多数功能块,并有性能优异的路径生成器,使得控制循环能低于1ms,能满足绝大多数的应用需求。虹科KPA MoDK的特性
1
虹科MoDK立足于虹科KPA自研的可扩展OSAL(操作系统抽象层),只要使用不同的OSAL库文件进行编译,即可运行于多种操作系统下。
2
最多支持三轴联动,点对点的轴控制理论上不限制轴数,仅取决于运行平台的性能。
3
控制循环低于1ms,同时拥有优秀的路径生成器。
4
Motion函数遵循PLCopen part1/part4标准编写,可集成于虹科KPA Straton环境中,使用PLC语言编程,更加容易上手使用;也可以跳脱出Straton环境,以C/C++库形式提供开发包,使用计算机语言开发。
5
支持虹科KPA matser 1.x/暂不支持2.x版本。
6
支持控制3种对象:Simulation 虹科KPA 运行环境内部仿真(纯文字参数仿真)/Vrep机器人仿真平台/ECAT & CiA402设备。
7
初始化参数可以在Studio中的Motion Configuration Utility进行配置,减少初始化过程中的代码量,并可以在运行过程中动态调整运动参数的最大值(如速度、加速度、加加速度)。
8
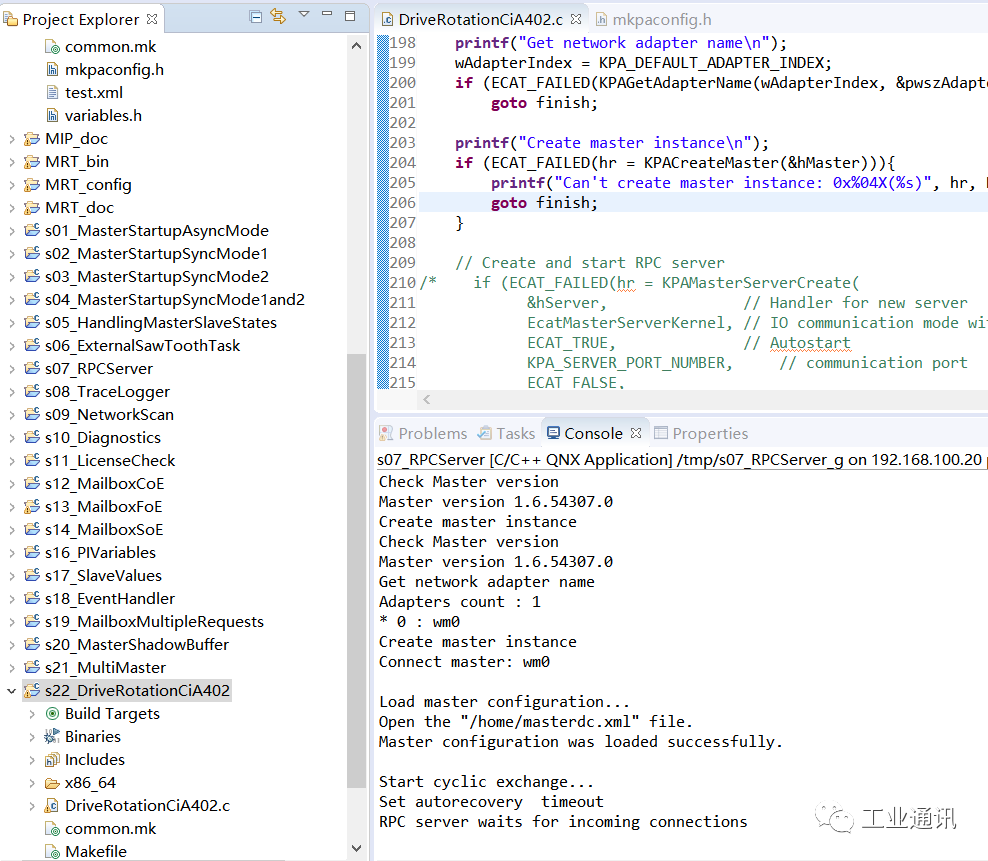
C/C++开发提供22个演示例程,涵盖了motion的绝大多数功能,使用CMAKE设置参数进行编译,可以得到不同平台、不同操作系统下的工程文件,可直接进行演示。
- 相关推荐
- 热点推荐
- 自动化
-
php运行环境的搭建方法2023-12-04 2437
-
javascript运行环境有哪些2023-11-27 3866
-
虹科干货 | 虹科物联网HMI/网关结合JMobile软件实现调度器功能2022-11-16 1810
-
虹科干货 | 简单几步教您安装OPC UA Tunneller软件2022-06-27 2749
-
干货 | 虹科KPA MoDK运行环境与搭建步骤(3)——MoDK例程测试2022-01-19 2133
-
干货|虹科KPA MoDK运行环境与搭建步骤(2)——MoDK运行环境搭建2022-01-14 2272
-
NodeMCU(1)环境搭建与固件烧录2021-10-28 809
-
Apache2.2.x+PHP5.3.x+MySQL5.1.x-搭建WMAP运行环境2021-09-18 848
-
怎么样才能快速搭建Hadoop运行环境2020-04-02 1036
-
Monkey测试环境搭建步骤详解2018-01-31 9421
-
Android 开发环境搭建步骤详细图解2017-10-24 1076
-
C语言的运行环境和运行过程2016-03-21 603
全部0条评论

快来发表一下你的评论吧 !
