

IMU系统简介
描述
- IMU原理
惯性测量单元(IMU)通常指由3个加速度计和3个陀螺仪组成的组合单元,加速度计和陀螺仪安装在互相垂直的测量轴上。低精度的IMU可以通过其他方式修正,GPS用于修正位置的长期漂移,气压计用于修正高度,磁力计用于修正姿态。
传感器直接固联在载体上称为捷联惯导系统。
MEMS陀螺仪原理
加速度计原理
MPU6050
MPU-60x0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号(SPI接口仅在MPU-6000可用)。MPU-60x0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。

MPU-60x0对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。一个片上1024字节的FIFO,有助于降低系统功耗。和所有设备寄存器之间的通信采用400kHz的I2C接口或1MHz 的SPI接口(SPI仅MPU-6000可用)。对于需要高速传输的应用,对寄存器的读取和中断可用20MHz的SPI。另外,片上还内嵌了一个温度传感器和在工作环境下仅有±1%变动的振荡器。
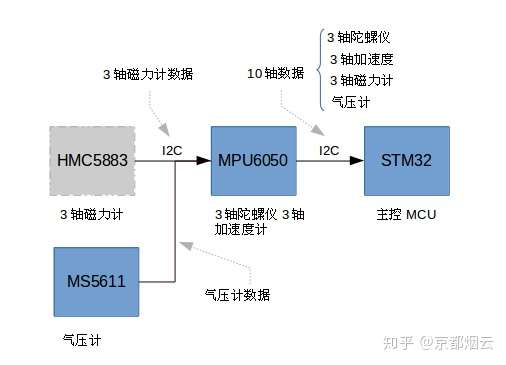
在crazepony上,MPU6050/HMC5883/MS5611传感器之间的连接如下图所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- IMU
-
IMU选型2015-04-20 5574
-
IMU评估问题(ADIS16488)2018-12-13 2948
-
3DM-GX5-15 惯性测试单元IMU2020-12-07 841
-
IMU的工作原理是什么?怎样去搭建一种IMU误差模型?精选资料分享2021-07-13 5822
-
如何使用imu_utils工具生成IMU的Allan方差标定曲线?2021-11-22 1621
-
捷联IMU信号采集系统的集成化设计2011-05-18 961
-
iSensor IMU安装技巧2012-12-13 1863
-
基于DSP集成式IMU信号采集系统2017-09-08 822
-
IMU惯导系统中加速计的特性简介2020-03-28 1911
-
IMU和AHRS之间的区别2020-04-20 2840
-
基于IMU和地磁传感器的导航系统设计2020-04-18 4612
-
精密微型IMU2021-04-26 883
-
向高端类IMU应用迈步—国产IMU技术应用分析2021-09-04 7867
-
先进雷达系统稳定性与IMU2023-05-09 2411
-
基于NRF24L01的IMU数据无线传输系统设计2023-10-26 633
全部0条评论

快来发表一下你的评论吧 !
