

瑞萨e2studio----RA2L1通过传感器检测温湿度
描述
1.概述
本篇文章主要介绍如何使用芯片型号R7FA2L1AB2DFL的开发板外接温湿度传感器进行温湿度检测,并通过串口显示温湿度。
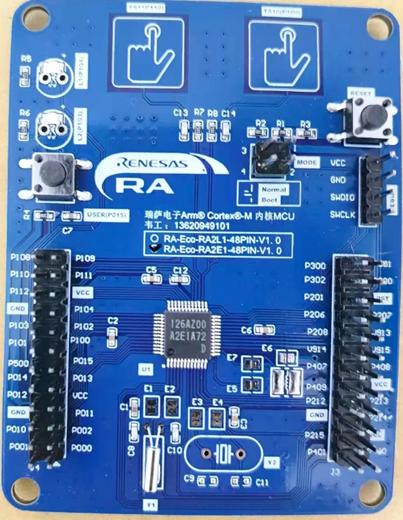
2.硬件准备
这里我们准备的是芯片型号R7FA2L1AB2DFL的开发板,DHT11温湿度传感器模块。
3.温湿度传感器参数
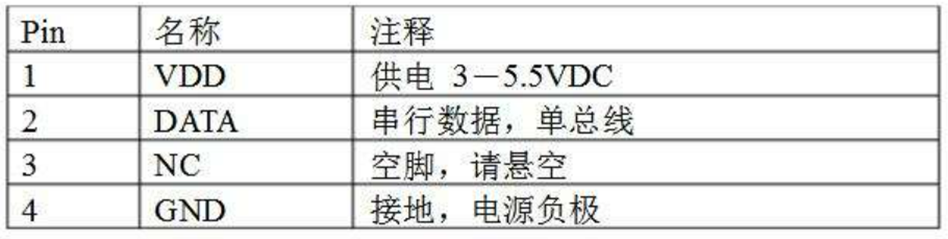
供电电压:3.3V~5.5V DC
输出:单总线数字信号
测量范围:湿度 20~90%RH,温度 0~50℃
测量精度:湿度±5%RH,温度±2%℃
分辨率:湿度1%RH,温度1℃
长期稳定性:<±1%RH/年
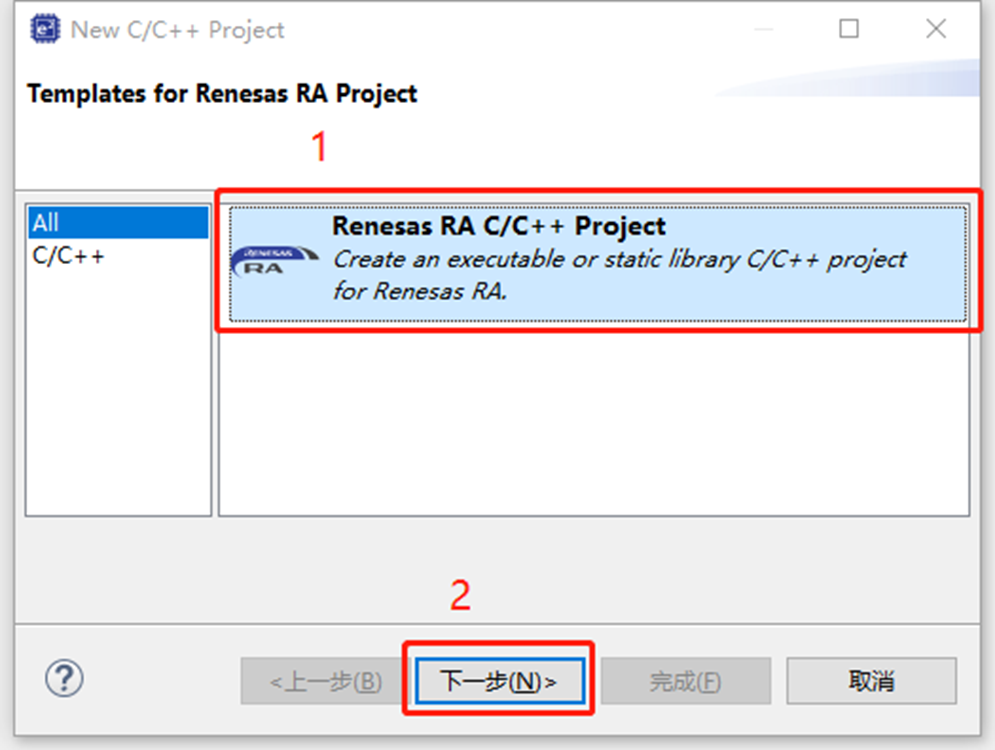
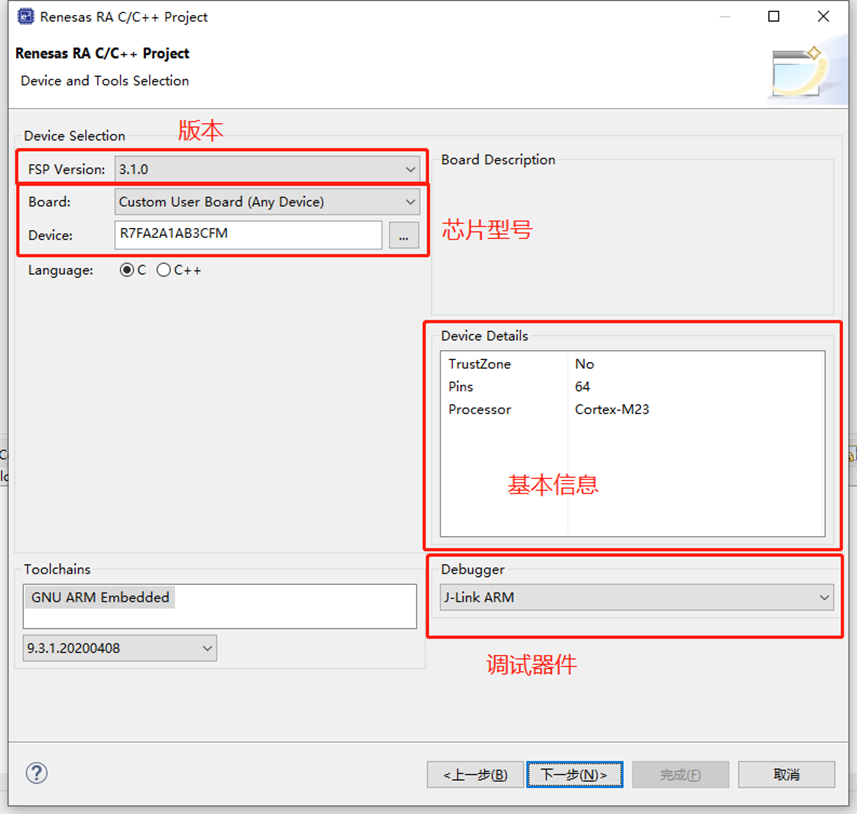
4.新建工程

5.工程模板
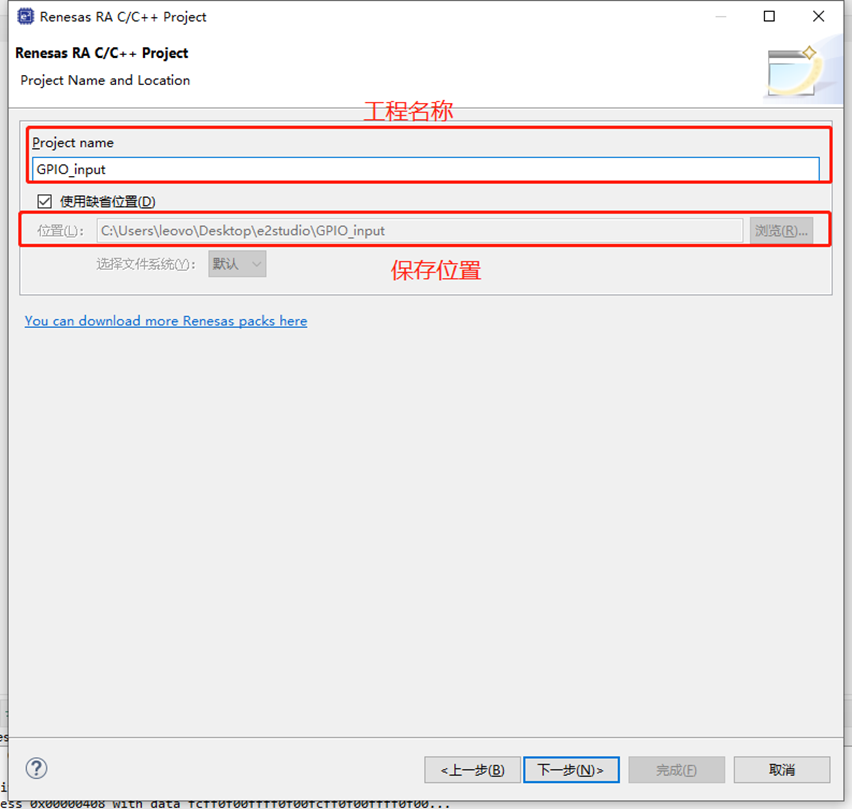
6.保存工程路径
7.芯片配置
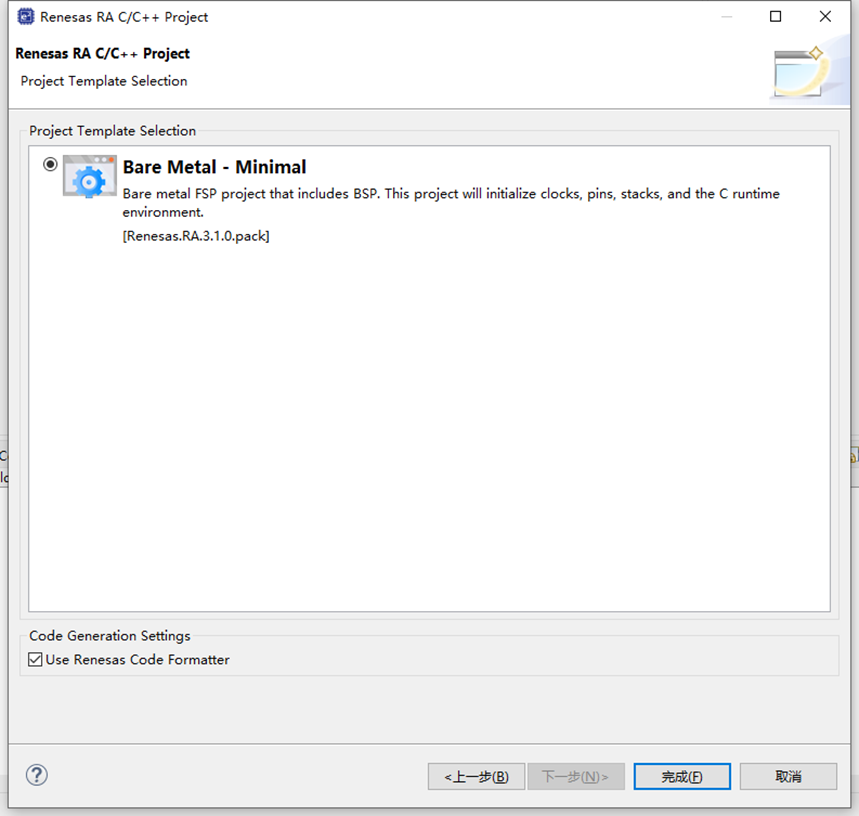
8.工程模板选择
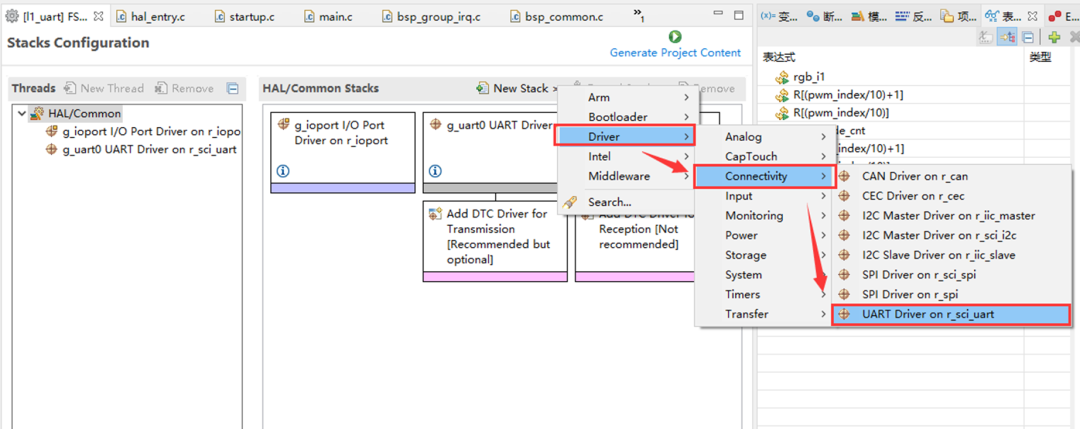
9.UART配置
点击Stacks->NewStack->Driver->Connectivity -> UART Driver on r_sci_uart。
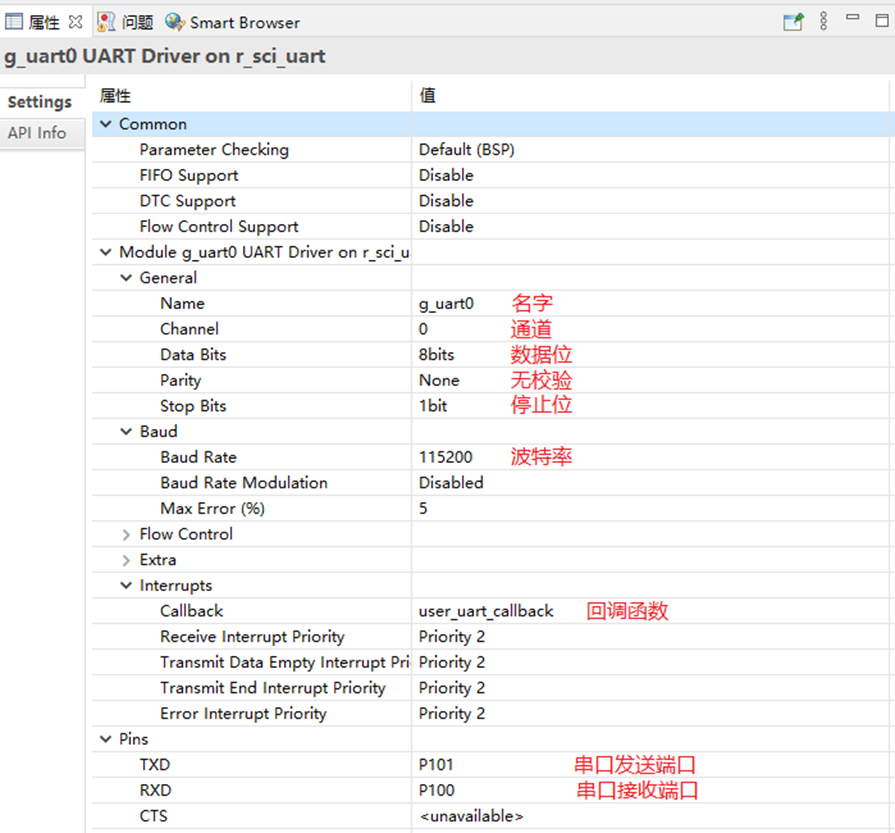
10.UART属性配置
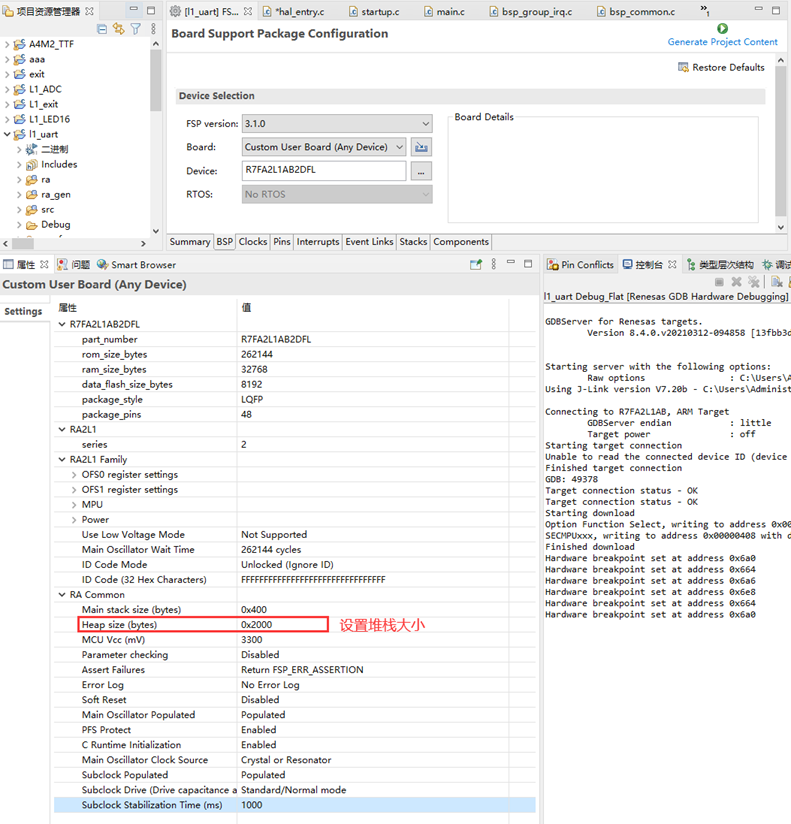
11.设置e2studio堆栈
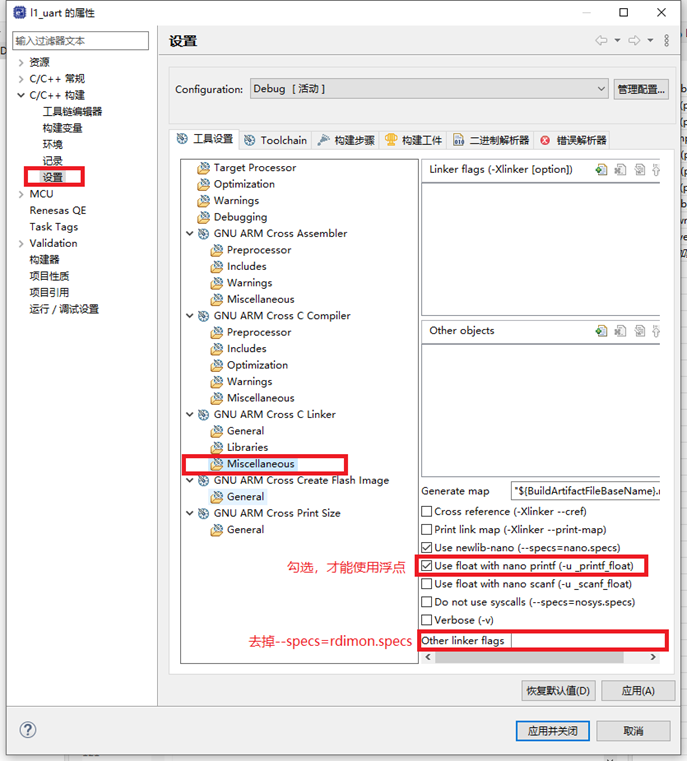
12.e2studio的重定向printf设置
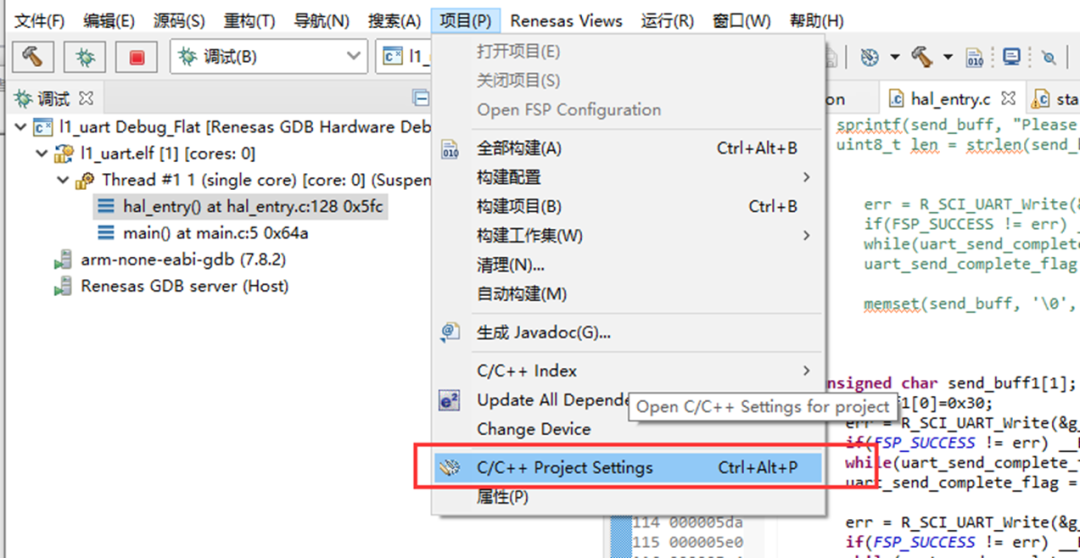
C++ 构建->设置->GNU ARM Cross CLinker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
13.printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。
注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i;i++)>
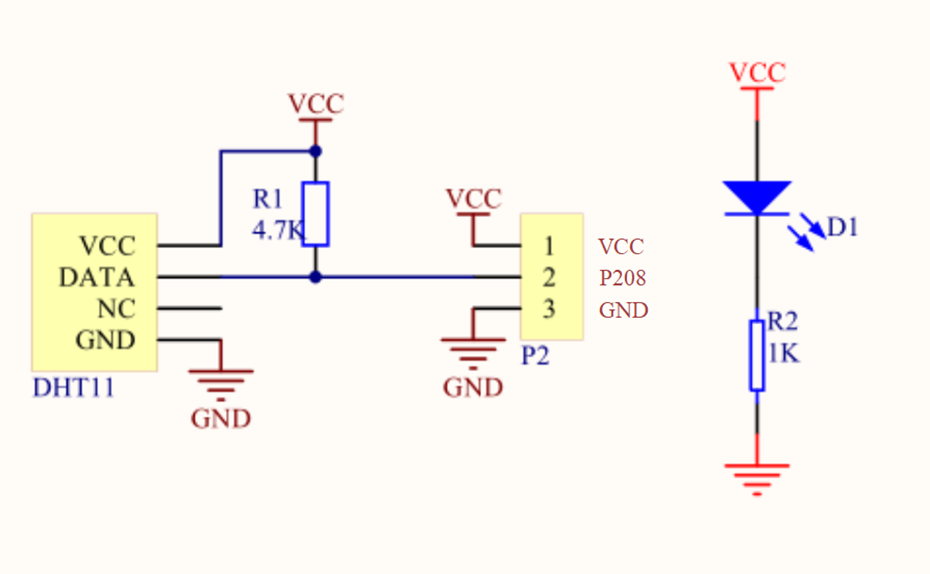
14.DHT11链接图
由下图我们可以得知,我们将DATA接在了P208引脚上。
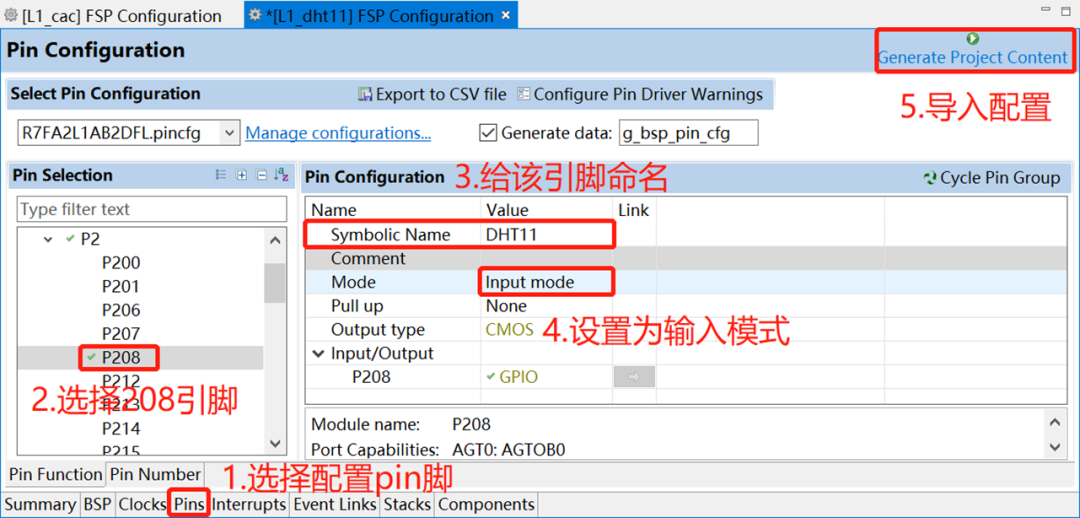
15.IO配置
可以给P208命名,并将P208引脚设置为输入模式。
16.DHT11数据传输
DHT11数字湿温度传感器采用单总线数据格式,单个数据引脚端口完成输入输出双向传输。数据分小数部分和整数部分,一次完整的数据传输为40bit,高位先出。
数据格式为:8bit湿度整数数据+8bit湿度小数数据+8bit温度整数数据+8bit温度小数数据+8bit校验和。
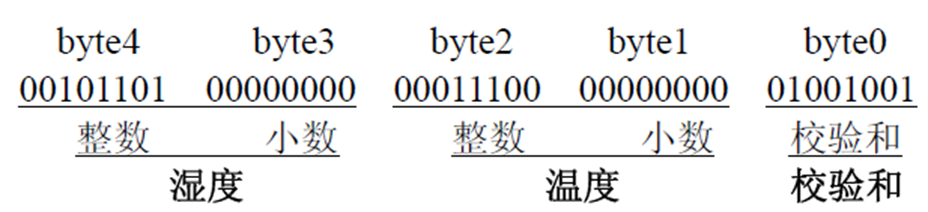
数据传送正确,则byte4+byte3+byte2+byte1=byte0。
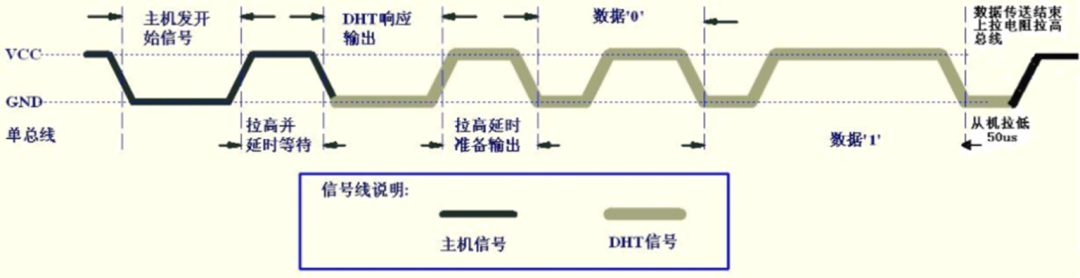
17.数据发送时序
首先主机发送开始信号,主机变为输出模式拉低数据线,保持至少18ms时间,再拉高数据线20~40us时间,然后主机变为输入模式读取DHT11的响应。DHT11接收到主机发送的开始信号,DHT11会拉低数据线,保持80us时间,作为响应信号,然后DHT11拉高数据线,保持80us时间后,开始输出数据。待40bit数据传输结束后,上拉电阻拉高总线。
18.数据0&数据1
数据1时序图:
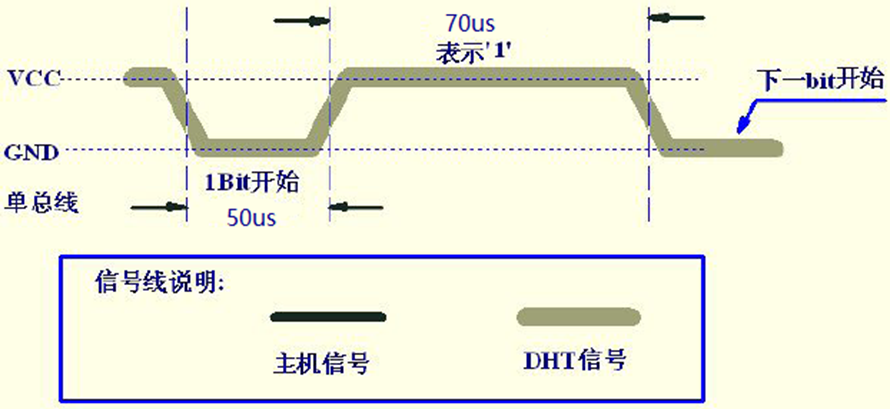
数据0时序图:
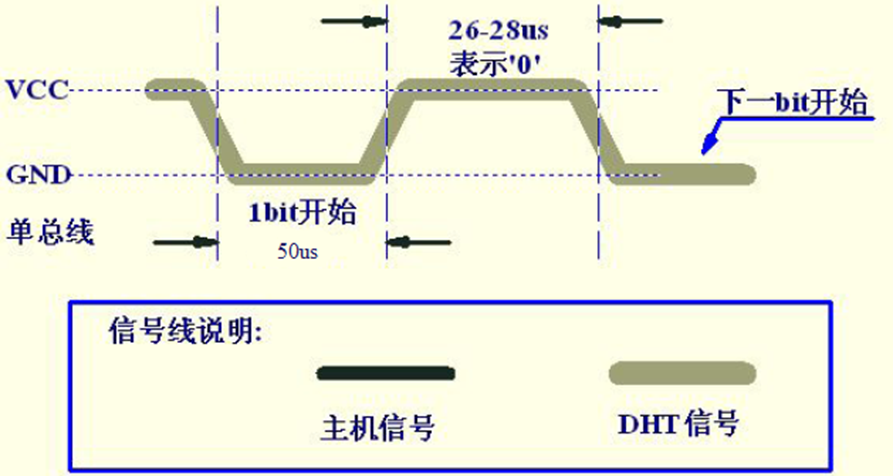
通过对比时序图可知,要判断数据0或数据1,只要判断拉高电平时间即可。例如,在电平被拉高的40us判断高低电平,若此时为低电平,则为数据0。若此时为高电平,则为数据1。
19.R_IOPORT_PortDirectionSet()函数原型
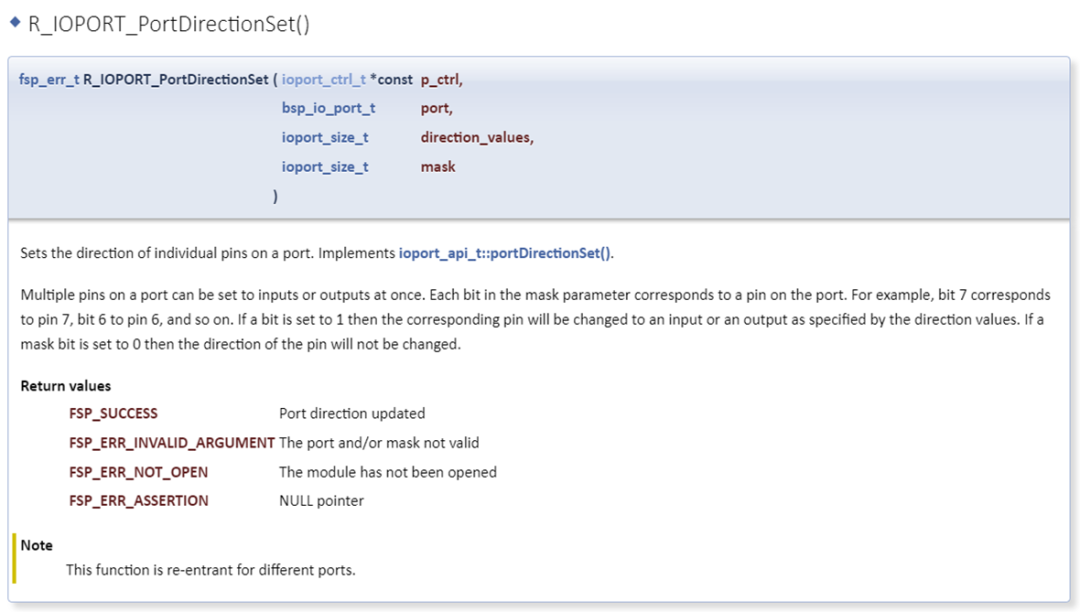
故可以通过R_IOPORT_PortDirectionSet()函数设置端口IO方向,设置方法如下所示。
//设置P208为输入
R_IOPORT_PortDirectionSet(&g_ioport_ctrl, BSP_IO_PORT_02, 0<<8, 1<<8);
//设置P208为输出
R_IOPORT_PortDirectionSet(&g_ioport_ctrl, BSP_IO_PORT_02, 1<<8, 1<<8);
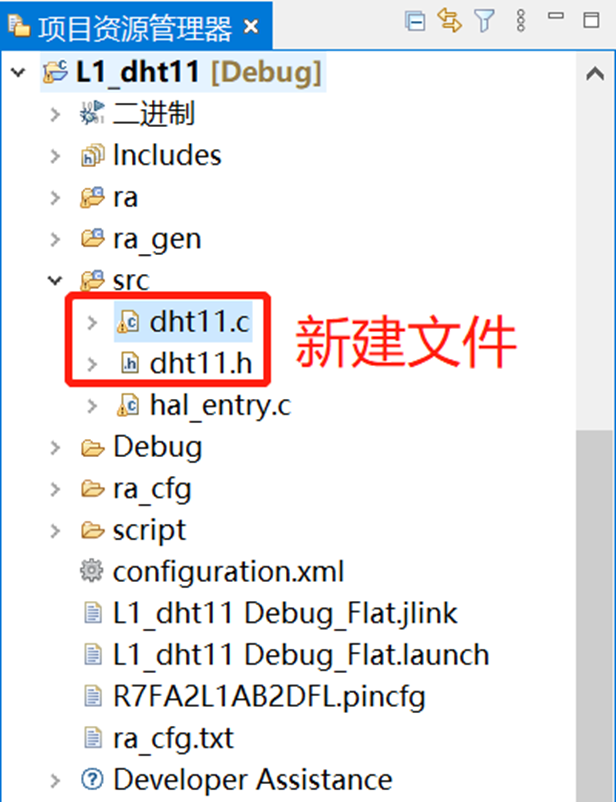
20.dht11.c& dht11.h
添加2个文件,dht11.c是驱动文件,dht11.h是头文件。
dht11.c 代码:
#include "hal_data.h"
#include
#include "dht11.h"
uint8_t Temp;
uint8_t Humi;
uint8_t flag=0;
uint8_t retry=0;
bsp_io_level_t p_port_value_dht11;
void DHT11_Rst()
{
DHT11_IO_OUT();//SET OUTPUT
DHT11_DQ_LOW;//拉低DQ
R_BSP_SoftwareDelay(18, BSP_DELAY_UNITS_MILLISECONDS);//拉低至少18ms
DHT11_DQ_HIGH;//DQ=1
R_BSP_SoftwareDelay(20, BSP_DELAY_UNITS_MICROSECONDS);//主机拉高20~40us
}
void DHT11_Check()
{
DHT11_IO_IN();//SET INPUT
retry=0;
R_IOPORT_PinRead(&g_ioport_ctrl, DHT11, &p_port_value_dht11);
while(p_port_value_dht11&&retry<100)
{
R_IOPORT_PinRead(&g_ioport_ctrl, DHT11, &p_port_value_dht11);
retry++;
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MICROSECONDS);
}
if(retry>=100)flag=1;
else retry=0;
while(!p_port_value_dht11&&retry<100)
{
R_IOPORT_PinRead(&g_ioport_ctrl, DHT11, &p_port_value_dht11);
retry++;
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MICROSECONDS);
}
if(retry>=100)flag=1;
if(flag==1)
{
printf("No dht11\n");
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_SECONDS);
}
}
void DHT11_Read_Data()
{
uint8_t buf[5];
uint8_t i;
flag=0;
DHT11_Rst();
DHT11_Check();
if(flag==0)
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])//校验读的温湿度结果是否正确
{
Humi=buf[0];
Temp=buf[2];
printf("Humi=%d\n",Humi);
printf("Temp=%d\n",Temp);
}
else printf("Receive error\n");
}
R_BSP_SoftwareDelay(2, BSP_DELAY_UNITS_SECONDS);
}
//从DHT11读取一个位 返回值:1/0
uint8_t DHT11_Read_Bit(void)
{
retry=0;
while(p_port_value_dht11&&retry<100)//等待变为低电平
{
R_IOPORT_PinRead(&g_ioport_ctrl, DHT11, &p_port_value_dht11);
retry++;
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MICROSECONDS);
}
retry=0;
while(!p_port_value_dht11&&retry<100)//等待变为高电平
{
R_IOPORT_PinRead(&g_ioport_ctrl, DHT11, &p_port_value_dht11);
retry++;
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MICROSECONDS);
}
R_BSP_SoftwareDelay(30, BSP_DELAY_UNITS_MICROSECONDS);
R_IOPORT_PinRead(&g_ioport_ctrl, DHT11, &p_port_value_dht11);
if(p_port_value_dht11)return 1;
else return 0;
}
//从DHT11读取一个字节 //返回值:读到的数据
uint8_t DHT11_Read_Byte(void)
{
uint8_t i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
dht11.h 代码:
#ifndef _DHT11_H_
#define _DHT11_H_
//IO方向设置
#define DHT11_IO_IN() R_IOPORT_PortDirectionSet(&g_ioport_ctrl, BSP_IO_PORT_02, 0<<8, 1<<8)
#define DHT11_IO_OUT() R_IOPORT_PortDirectionSet(&g_ioport_ctrl, BSP_IO_PORT_02, 1<<8, 1<<8)
//IO操作
#define DHT11_DQ_LOW R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_08, BSP_IO_LEVEL_LOW) //数据端口 PA0
#define DHT11_DQ_HIGH R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_08, BSP_IO_LEVEL_HIGH) //数据端口 PA0
void DHT11_Rst(void);
void DHT11_Check(void);
void DHT11_Read_Data(void);
uint8_t DHT11_Read_Bit(void);
uint8_t DHT11_Read_Byte(void);
#endif
21.hal_entry.c
hal_entry.c代码:
#include "hal_data.h"
#include
#include "dht11.h"
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
fsp_err_t err = FSP_SUCCESS;
unsigned char send_buff[100];
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i;i++)>
22.结果演示
22.结果演示
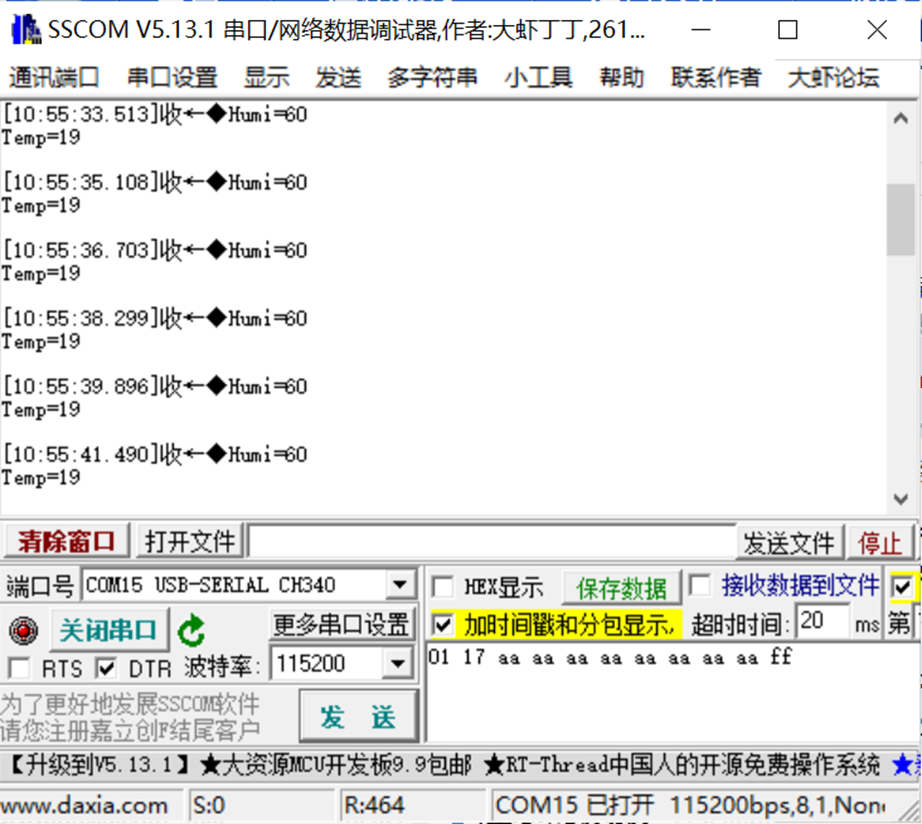
上图是我们测出来的温湿度,下图是当地温湿度。可以看出还是在误差范围内的。
上图是我们测出来的温湿度,下图是当地温湿度。可以看出还是在误差范围内的。
当我们没有接上DHT11时:
当我们没有接上DHT11时: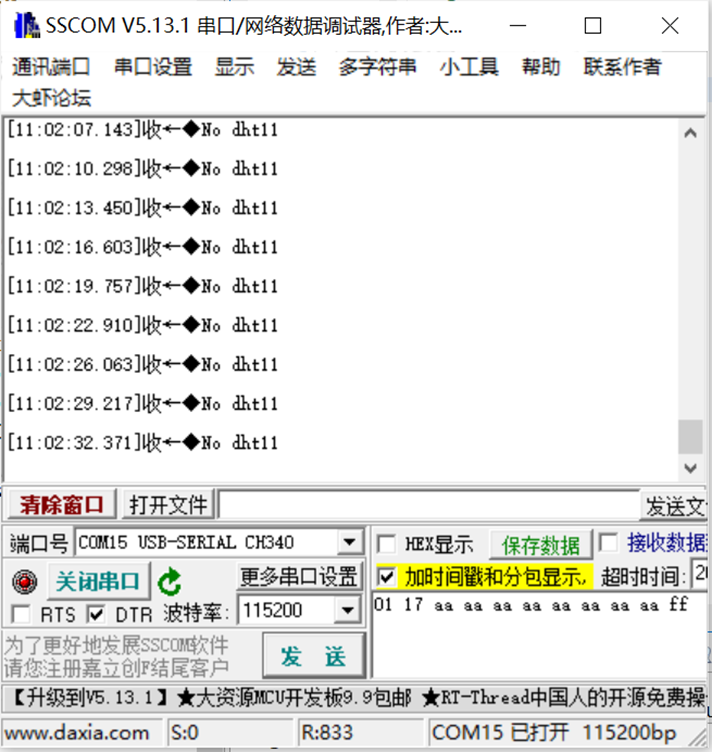
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【RA-Eco-RA4M2开发板评测】RT-Thread上驱动I2C温湿度传感器2025-05-08 2089
-
【瑞萨RA6E2地奇星开发板试用】DHT11 测量温湿度2025-12-19 493
-
【瑞萨FPB-RA6E2试用】【瑞萨FPB-RA6E2】Zephyr-驱动-DHT11-温湿度传感器及设备树理解2026-01-13 1498
-
【瑞萨RA2L1入门学习】工业级高精度温湿度监控终端2026-05-08 1093
-
【瑞萨RA2L1入门学习】DHT11温湿度采集2026-05-09 307
-
【小e开发板试用体验】 2 温湿度传感器精度偏低【影响 一般】2016-01-12 3896
-
请问谁能分享瑞萨单片机S7G2对DTH11温湿度传感器的支持,有.c和.h文件的?2018-07-17 2086
-
基于蓝牙技术的温湿度传感器方案2018-08-28 3056
-
DHT11温湿度传感器简介2022-02-16 5029
-
SHT1x系列温湿度传感器的驱动设计与实现2022-12-14 2691
-
瑞萨e2studio----PWM2021-11-02 2815
-
项目 | 瑞萨RA2L1--电子时钟2022-01-11 3864
-
瑞萨RA6M3 MCU通过I2C读取HS3001温湿度传感器2023-09-26 2166
-
使用RT-Thread和CPK-RA2L1采集DHT11温湿度2023-10-11 2825
-
使用瑞萨e² studio FSP基于RA2E1定时器配置PWM输出2023-08-01 2394
全部0条评论

快来发表一下你的评论吧 !
