

平头哥CDK助力中科昊芯HX2000系列芯片之双电机有感FOC控制系统专题(四)拓展:永磁电机三闭环有感伺服控制
描述
自中科昊芯推出专题阐述HXS320F28034双电机有感FOC控制系统实现以来,第一期主要分析了双电机有感FOC控制原理,第二期着重分析了永磁BLDC的霍尔位置开环控制,第三期着重分析了永磁BLDC的双闭环调速,第四期着重分析了永磁PMSM双闭环FOC调速,本期基于上期的方案做了一个拓展,增加了位置闭环优化,实现永磁电机三闭环有感伺服控制,并继续基于平头哥半导体有限公司的剑池集成开发环境(简称“CDK”)V2.12.1版本与HXS320F28034驱动一体板联合开发。
PMSM三闭环有感伺服原理如图1,系统给定位置θ*与差分增量式编码器计算所得实际角度位置θ相比较,经位置PI运算得到给定转速n*,与差分增量式编码器计算所得实际转速nfbk相比较,经速度PI运算得到q轴电流给定值iq*,采用id*=0控制,与霍尔电流采样得到三相实际电流ia,ib,ic,经CLARK与PARK变换所得d轴与q轴电流id,iq进行比较,经电流PI输出调节电压Ud*,Uq*,经反PARK变换得到调节电压Uα*,Uβ*,经空间矢量脉宽调制SVPWM输出三路开关管切换时间Tcm1,Tcm2,Tcm3,与三路PWM输出三角载波相比较得到六路调制脉宽,驱动控制三相六桥臂MOSFET逆变器通断,实现三闭环伺服的位置精确控制。
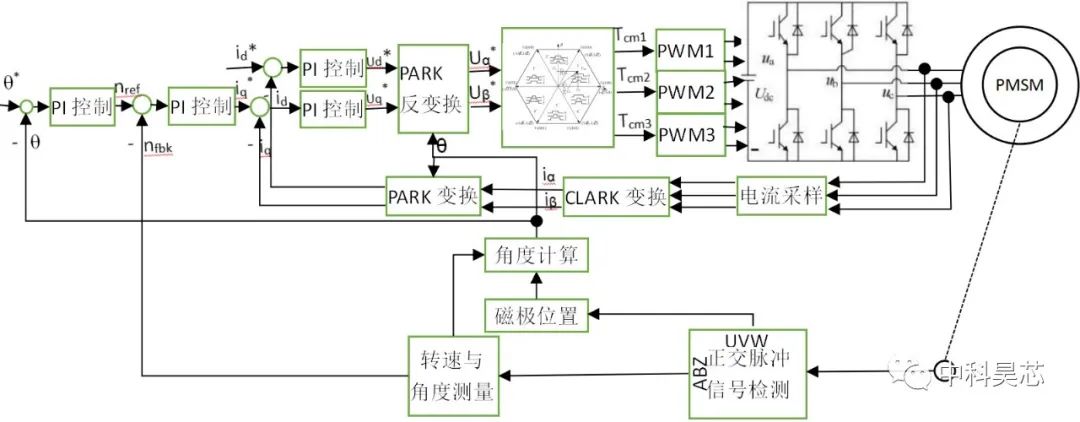
图1 PMSM三闭环有感伺服系统框图
依照上述原理,设计HXS320F28034 PMSM三闭环有感伺服系统如图2,通过GPIO按键控制电机使能与位置给定,转子位置与速度检测通过QEP模块实现,电流采样通过ADC模块实现,经三闭环PI调节输出PWM波的导通脉宽,从而实现电机角度位置的精确伺服控制。硬件连接如图3,图中的小黑色电路板为差分编码转换器,读者可根据需要自行采购。
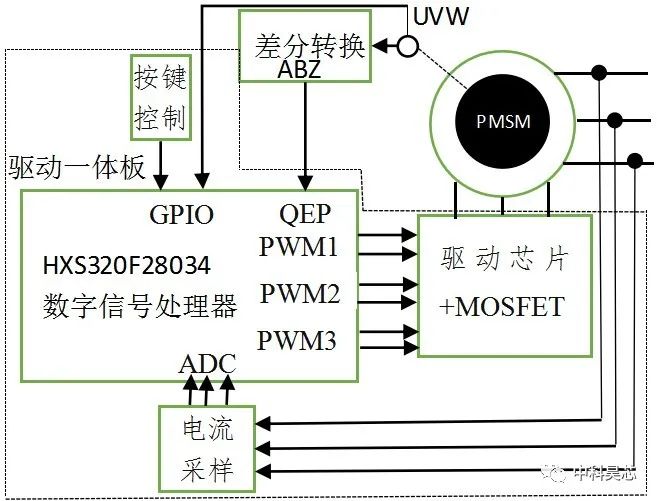
图2 系统硬件原理图

图3 系统硬件连接
系统所采用的软硬件开发环境详见《芯教程丨平头哥CDK助力中科昊芯HX2000系列芯片之双电机有感FOC控制系统专题(一)》。
根据上述分析,基于CDK开发PMSM三闭环有感伺服系统,代码包括:PWM、QEP的外设GPIO引脚配置、三路三相PWM波输出配置,QEP初始化配置与差分编码器位置采样、转速与电角度计算、ADC初始化配置与电流采样、PMSM斜坡启动编码器校正、PI调节算法、CLARK、PARK正逆变换、SVPWM算法调制的EPWM事件触发中断服务程序,主程序执行调用,其中SVPWM算法调制的EPWM事件触发中断服务程序代码为:
1.void INTERRUPT epwm1_isr(void)2.{3. /*出于安全考虑,默认驱动板上电时封波,按下GPIO7后,电机开始启动*/4. if(GpioDataRegs.GPADAT.bit.GPIO7==0)5. {6. epwm_flag++;7. }8. /*判断启动脉冲信号是否产生,产生后电机开始启动*/9. if(epwm_flag!=0)10. {11. /*启动计时*/12. start_step++;13. /*扇区读取:用于获取确定的转子初始位置与对应的SVPWM初始扇区*/14. sector_uvw();15. /*斜坡启动与调速:200rpm斜坡加速启动后调速,300个计数内完成启动*/16. if((speed_ref1<300)&&(start_step<=300))17. {18. /*斜坡启动*/19. start_ramp();20. }21. else22. { if((speed_add!=0)||(speed_sub!=0))23. {24. /*按计数,分配在不同时段实现调速与转子位置伺服控制*/25. speed_theta_regulated();26. if(theta_reg<250000)27. { /*调速*/28. speed_regulated();29. }30. else31. { /*角度调整*/32. theta_regulated();33. /*位置闭环*/34. servo_loop();35. }36. }37. }38. /*转速闭环*/39. speed_loop();40. /*电流闭环*/41. current_loop();42. /*给定固定初始角度使电机转过最大反电势点,读取校正值=此时脉冲计数*/43. theta=theta_open;44. /*根据差分编码器的霍尔信号判断电机反电势是否处于最大值*/45. if(theta==NA*_IQ7(PI/3)+_IQ7(PI/6))46. {47. iel_int++;48. }49. /*反电势最大时,切电角度闭环,使编码器零位与电机零位对齐,完成启动*/50. if(iel_int!=0)51. {52. /*计算电角度*/53. theta=freq*_IQ7(2*PI);54. }55. /*两相旋转坐标系变换到两相静止坐标系*/56. iPark();57. /*空间矢量旋转变换*/58. svpwm_motor();59. /*调制占空比输出配置*/60. epwm_compare();61. }62. /*清除事件中断的INT全局中断*/63. EPwm1Regs.ETCLR.bit.INT=1;64. /*中断应答,锁定IER的第3组中断向量*/65. PieCtrlRegs.PIEACK.all=PIEACK_GROUP3;66.}
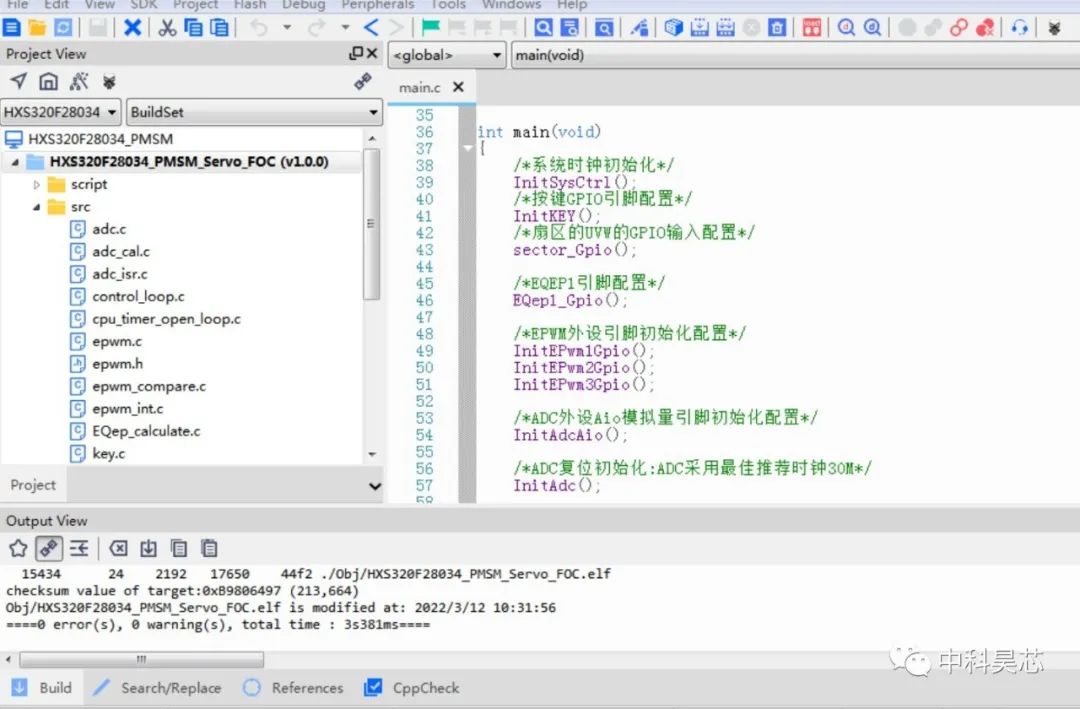
CDK上开发PMSM三闭环有感伺服系统控制程序,其编译结果为:
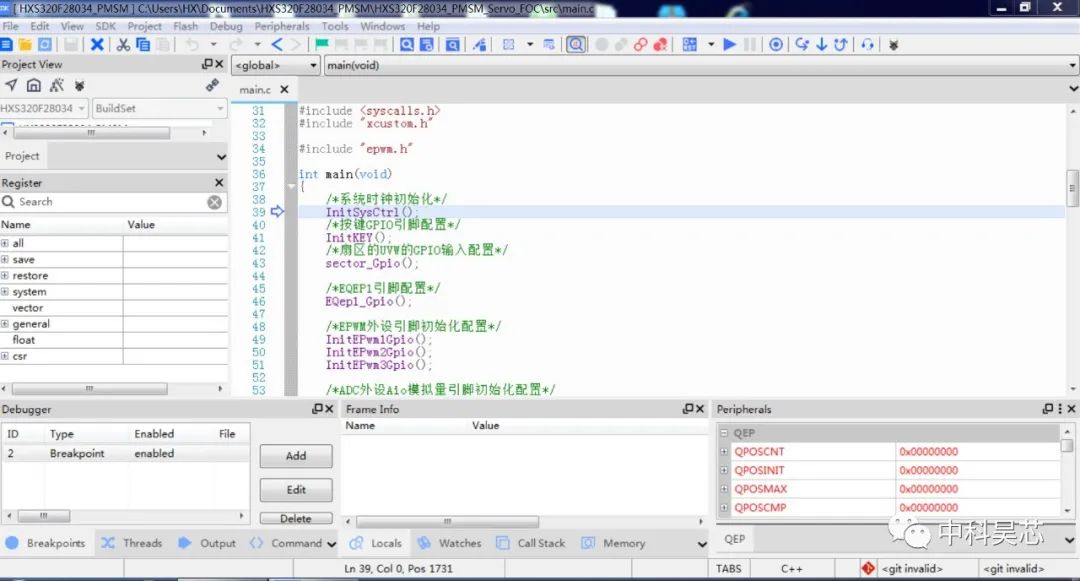
编译通过后,可以开始调试,其调试结果如下:
调试后,控制PMSM在400rpm~600rpm调速与调节转子位置的效果如下:

关于中科昊芯
“智由芯生 创享未来”,中科昊芯是数字信号处理器专业供应商。作为中国科学院科技成果转化企业,瞄准国际前沿芯片设计技术,依托多年积累的雄厚技术实力及对产业链的理解,以开放积极的心态,基于开源指令集架构RISC-V,打造多个系列数字信号处理器产品,并构建完善的处理器产品生态系统。产品具有广阔的市场前景,可广泛应用于工业控制及电机驱动、数字电源、光伏、储能、新能源汽车、消费电子、白色家电等领域。
- 相关推荐
- 热点推荐
- 控制系统
-
复合结构永磁电机2018-02-24 3964
-
基于Simulink的永磁电机(PMSM)控制仿真2021-08-27 1436
-
怎么实现三相永磁同步电机Foc的有感程序控制?2021-10-18 2124
-
平头哥剑池CDK助力中科昊芯HX2000系列芯片系统开发与调试2022-03-09 2731
-
如何保持永磁电机正常工作?2023-03-23 1465
-
直流永磁电机控制系统中的应用2016-04-06 694
-
交替极无轴承永磁电机控制系统研究2016-04-26 686
-
高压断路器永磁电机机构及控制系统设计_刘爱民2017-01-08 877
-
昊芯HX2000系列芯片助力电机安全在线调试保护2023-02-12 2044
-
芯教程丨平头哥助力中科昊芯HX2000系列芯片专题SCI串口通信(三)FIFO中断通信2022-05-26 1955
-
平头哥CDK助力中科昊芯HX2000系列芯片之双电机有感FOC控制系统专题(四)永磁电机双闭环FOC控制2022-03-10 2271
-
芯教程|平头哥助力昊芯HX2000系列芯片电机过流跳闸保护专题(二)EPWM_DC数字比较2022-06-10 2325
-
芯教程|平头哥助力昊芯HX2000系列芯片电机过流跳闸保护专题(三)比较器超阈值检测2022-06-17 1547
-
芯教程丨昊芯HX2000系列芯片助力电机安全在线调试保护2023-02-13 3101
-
永磁电机和普通电机优缺点2023-08-26 9967
全部0条评论

快来发表一下你的评论吧 !
