

基于凌阳16位单片机的智能车设计
控制/MCU
描述
引言
轮式小车是智能小车机械结构的主体部分,由车身、轮子、变速器、传动轴等结构部件构成。轮式小车还包括提供动力的驱动器,用来收集智能小车的自身状态信息或外部环境信息,并对多传感器的数据进行分析、融合,动态调整小车的运动状态,实现在一定条件下的自主行驶。
硬件设计
图1是智能车总体的设计方案及组成原理。微处理器采用了16位SPCE061A单片机,以此为核心设计了红外传感模块、电机驱动模块、PI控制器及相关的显示指示模块。
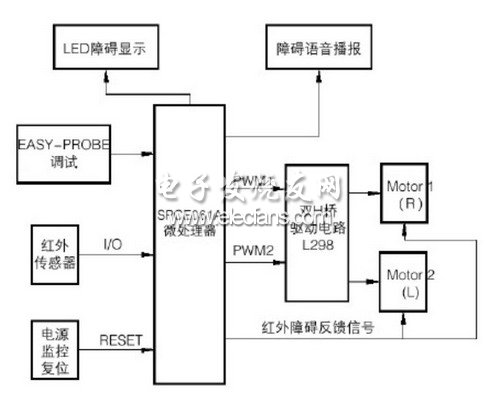
图1 智能车总体的设计方案
轮式小车机械结构的设计
智能小车机械结构包括车轮、车身、转向舵机、驱动器和各种传动机构等。小车车身主体由2mm厚的有机玻璃组成。小车有三个车轮,其中后面的两轮为驱动轮,分别有独立的直流电机驱动。
若直接将直流电机输出轴连接小车的轮胎,会出现电机的转矩偏小、小车的动力差等缺点,采用PWM直流电机调速方法又会使电机的输出转矩在原有压降的基础上又有所下降。为了解决转矩速度之间的矛盾,笔者设计了二级定轴轮系转动减速装置,其结构示意图如图2所示。
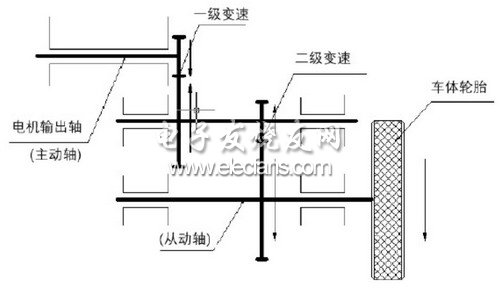
图2 减速机构原理图
其中齿轮均为圆柱直齿轮。若主动轴用1表示,末轮以K表示,轮速为ω,圆柱直齿轮啮合次数为m,则上述轮系机构的传动比ilk为

(1)
此处电机输出轴是主动轴,车体轮胎是从动轴。
其中一级变速主动轮齿数Z1主=11,从动轮齿数Z1从=35;二级变速主动轮齿数Z2主=11,从动轮齿数Z2从=40;圆柱直齿轮啮合次数为m=2。可以计算出ilk=11.5。
红外传感器
红外传感电路采用反射式红外传感器,可以方便地实现实时监控并有效防止误触发,灵敏度容易控制。图3为红外检测电路,核心IC器件是LM393,该集成块内部装有两个独立的电压比较器。

图3 红外检测电路
LM393类似于增益不可调的运算放大器。每个比较器有两个输入端和一个输出端。两个输入端一个称为同相输入端(用“+”表示),另一个称为反相输入端(用“-”表示)。用作比较两个电压时,任意一个输入端加一个固定电压做参考电压,另一端加一个待比较的信号电压。当“+”端电压高于“-”端时,输出管截止,相当于输出端开路。当“-”端电压高于“+”端时,输出管饱和,相当于输出端接低电位。两个输入端的电压差大于10mV就能确保输出能从一种状态可靠地转换到另一种状态。因此,把LM339用在弱信号检测等场合是比较理想的。测速反馈电路由发光二极管、光电级管、单稳态电路以及装在主轴上的光电码盘组成。当光码盘上的孔经过发光二极管时,发光二极管发出的光使光电三极管导通,输出高电平;当光码盘上的非孔部分经过光二极管时,光电极管截止,输出低电平。产生的周期性脉冲经单稳电路整形送高速输入通道IOB2或IOB3外部中断源,取得每次上升沿的时间值, 就是定时器T1的值,每两次T1上升沿值之差为光电脉冲周期,从而可计算出主轴的转速。
电机驱动电路
微型直流电机以其良好的线性特性、优异的控制性能和非常高的效率广泛应用于小功率系统中。为了控制直流电机,本文采用PWM控制。SPCE064A的I/OB特殊功能IOB8 、IOB9就直接提供了两个PWM输出口,直接输出控制信号即可,无须另加电路。考虑到电压、电流的等级及尺寸、外观因素,本文采用L298代替三极管构成驱动电路,如图4所示。
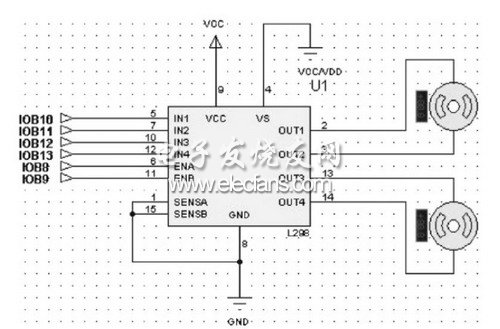
图4 直流电机驱动电路
L298可同时控制两个电机,且输出电流达到2A。其ENA(引脚6)和ENB(引脚11)分别于SPCE064A的IOB8和IOB9相连,可实现直流电机的PWM速度控制。SENSEA、SENSEB为电流反馈引脚,用于实现直流电机的内环电流闭环控制。
控制器
常规的智能车一般引入输出电机的转速作为负反馈行程单闭环调速系统。虽然这个闭环具有较强的抗干扰性能,转速调节器采用常规PI调节器,但是在系统中静差仍然存在,即在PI控制调节器下稳态误差只能减少而不可能消除。因此,单闭环调速系统控制效果和性能对给定稳压源和速度检测元件的精度具有依赖性。
直流电机在全压启动时会产生很大的冲击电流,这对电机的换向不利,实际中表现为小车在变向或倒车时控制不及时,有较大的延迟时间。引入自动限制电枢电流的电流环负反馈对解决此问题是有效的。为了使转速和电流两种负反馈分别起作用,在系统中设置两个调节器, 分别调节转速和电流。二者之间串级联接。把转速调节器的输出当作电流调节器的输入。从闭环结构上看,电流环在里面,转速环在外面,形成了转速、电流双闭环调速系统,如图5所示。

图5 转速电流双闭环调速系统
其中,β为电流反馈系数,n为转速, α为转速反馈系数。ASR为转速比例积分调节器,用来实现转速无静差。ACR为电流比例积分调节器,用来实现电流无静差。当两个调节器都不饱和时,双闭环调速系统在稳态工作点上,PI调节器的稳态输出量与输入量无关。
软件程序设计
软件程序由主程序、寻迹模块程序、避障模块程序、避障语音播报程序和LED显示车体转向程序等几部分组成。图6、图7即为主程序和寻迹程序流程。
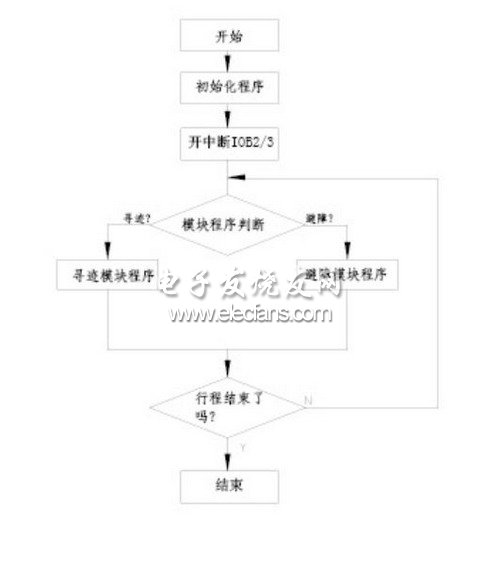
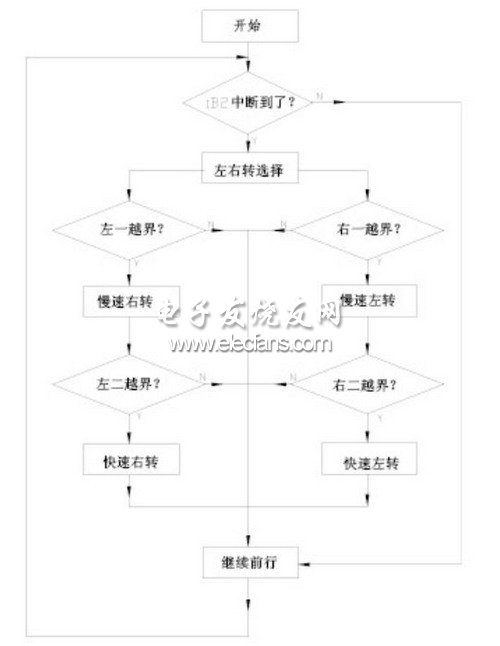
图6 主程序流程图 图7 寻迹程序流程图
PWM算法的实现
凌阳SPCE061A单片机提供了两个16位定时器,分别有相应的定时器控制寄存器设计相关参数,P_TimerA_Ctrl(700BH)和P_TimerB_Ctrl(700DH)的第6~9位设置该定时器输出不同频率的脉宽调制信号。
智能车实地调试
小车的实际调试是让小车运行在一个指定或任意给定的由纸板构成的迷宫通道,通道设有两个进出入口。开始测试时将小车放置在入口处并打开小车电源,小车可以顺利地在迷宫内实现躲避障碍,最后从迷宫的另一个出口出来。循迹的测试是在一张空旷的贴有一定黑线轨迹的桌子上进行,测试结果显示,小车可以按照比赛的要求进行循迹、转向和避悬崖。
结语
本次设计的智能车是机电一体化的综合产品。循迹模块能实现寻黑线车体的自由运转。小车可以顺利地完成拐直角弯道或者掉头返回(180°转弯)等操作。
-
基于凌阳16位单片机的智能车电路模块设计2014-10-11 5229
-
基于HOLTEK单片机的智能车2014-05-17 3492
-
智能车教程单片机原理及应用2021-07-14 1106
-
基于单片机的智能车设计2021-09-02 1181
-
怎样去设计一种基于AVR单片机的无线语音遥控智能车2021-09-22 2068
-
智能车/单片机的相关资料分享2022-01-13 1246
-
基于凌阳单片机控制的简易智能电动车设计2009-08-04 728
-
基于凌阳单片机的步进电机加减速的控制方法2011-01-05 1016
-
基于16位单片机MC9S12DG128的智能车控制系统设计与2009-12-04 2369
-
凌阳单片机开发资料2011-02-17 2091
-
凌阳单片机怎么样_凌阳单片机还有人用吗2018-04-10 16426
-
凌阳十六位单片机与51单片机的比较分析2018-04-11 8357
-
使用16位单片机和激光传感器实现寻迹智能车的软硬件设计2018-11-27 5198
-
基于16位单片机的语音电子门锁系统详解2019-07-13 6007
全部0条评论

快来发表一下你的评论吧 !
