

360全景环视发展历程
描述
全景环视概念最早是由K.Kate,M.Suzuki,Y.Fujita,Y.Hirama等四人于2006年首先提出。这一概念提出后,马上引起了国内外众多汽车生产厂商和相关科研单位的注意。2007年,日产公司发布了首款全景行车安全系统“环景监视系统AVM”,2008年本田推出了mulTI-view camera system,2009年阿尔派推出TOPVIEW系统,2010年Fujitsu公司开发了MulTI-Angle Vision系统,宝马公司自主研发的只有左、右、后三个方位视图的泊车辅助系统,首先应用在X6上,宝马74系列上的全景系统还是其供货商提供的。随着中国汽车工业的发展,以及全景环视系统技术得日渐成熟,国内的大部分汽车厂家在乘用车、商用车、工程车上已经或即将布局360全景环视系统。
在后装市场,全景影像系统和当年导航的发展轨迹是一样的。只要一个功能是实用的,能为消费者认可,整合是个必然结果。将来360全景系统和导航的结合也是一个必然趋势。全景影像系统从分屏显示到有缝拼接再到无缝全景,再到2D+3D全景。逐步增大视野范围及安全性。当下全景环视不仅充分发挥自己的产品特点,同时也融合了如ADAS,DMS,雷达,胎压等一些列有助于行车安全的系统。使更对的有益的系统联动,也更好的提升了驾驶体验。
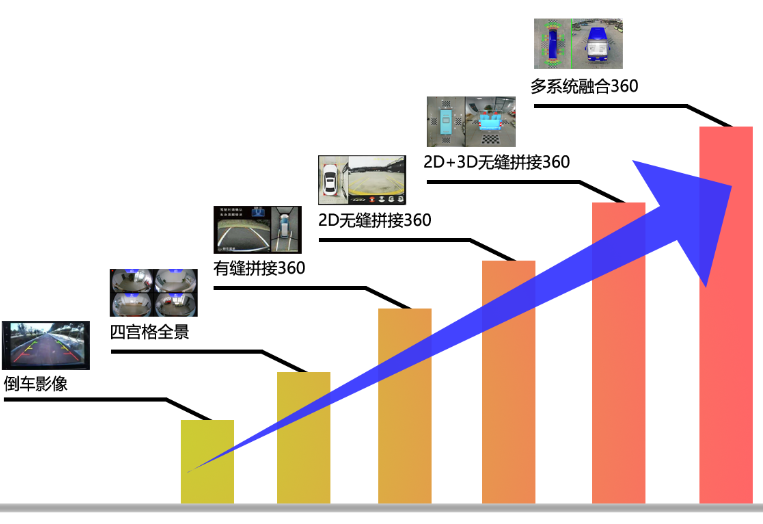 全景环视发展过程
全景环视发展过程
倒车影像
该方案是在汽车尾部安装摄像头。在倒车的时候切换至倒车画面。早期倒车影像系统的出现,使直观的倒车画面从无到有。对于倒车时的安全性起到了不小的提升。此时的系统尚未能解决全车四周的环视影像。
 倒车影像
倒车影像四宫格全景
该方案是在之前倒车影像方案的基础上再添加前、左、右广角摄像头。实时采集车辆四周的路况信息。解决了全车影像的盲区问题。此方案仅仅直接对收集的画面做直接的显示,因此驾驶人员仅能够看到,但不直观。于是新的优化方案呼之欲出。
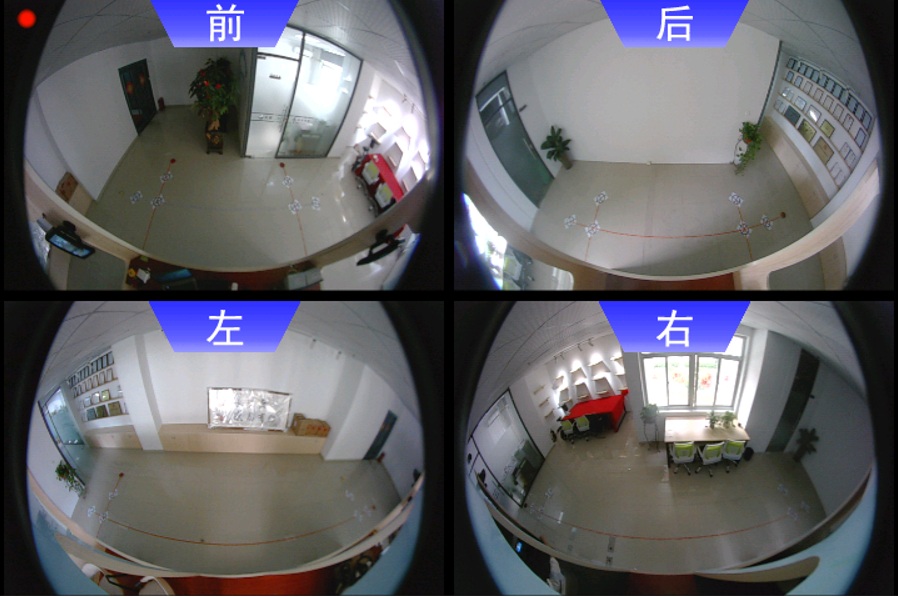 四宫格全景
四宫格全景
有缝拼接360
有缝拼接的方案在车辆的前后左右装四个广角摄像头,广角在150度到180度之间,对图像进行了处理和显示,不是像分频显示那样简单地将图像迭加起来,而是将图像处理后,中间是车子,将图像放在周边,很直观。但是有一个缺点,由于技术的问题,四个图像拼接的地方,就是四个对角在线,无法进行全面平滑的处理,因此在四个图像的拼接处有明显的四条线,有的车厂用黑线,有的用灰线,来掩盖技术上的缺陷,我们叫做有缝拼接360度全景环视系统。
 有缝拼接360
有缝拼接360
2D无缝拼接360
随着技术的发展,针对无缝拼接所出现的情况,拼接缝区域过度,不同画面光度平衡等技术的发展。显示效果更好,更直观的的2D无缝拼接360诞生。司机能够在车内直观的观察到从虚拟车顶向下看的2D俯视图。很直观的看出车辆周边的路面信息。
 2D无缝拼接360
2D无缝拼接360
2D+3D无缝拼接360
在基于拥有2D拼接技术的基础上,通过任意三维视角的转换技术,2D+3D无缝拼接360可实现所需角度的任意切换。该方案实现了重点关注区域的用户自动调取。拥有更酷炫、实用的显示效果和更人性化的互动操作。
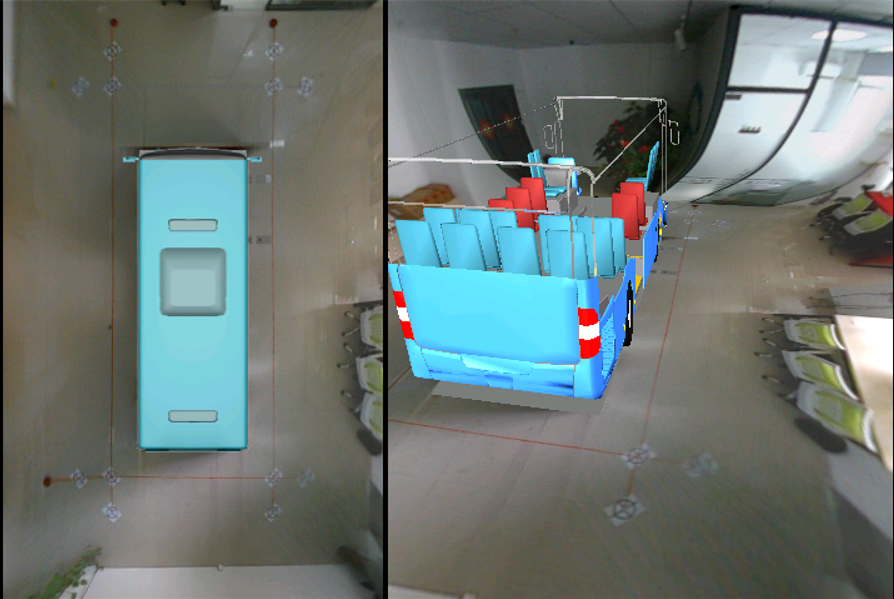 2D+3D无缝拼接360
2D+3D无缝拼接360
多系统融合360
随着车载电子设备品种日益增加,需要直观显示的内容也增加。一辆车上往往有两个甚至两个以上的显示屏。对于驾驶人员而言,十分不方便。多融合系统融合了ADAS信息、雷达信息、胎压信息等等。多系统融合精简系统,降低了成本,方便了驾驶人员。是今后发展的趋势。
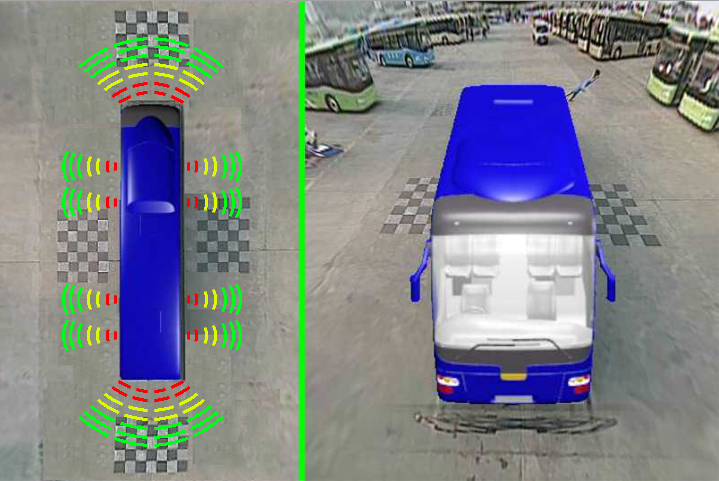 360全景环视融合超声波雷达效果
360全景环视融合超声波雷达效果
- 相关推荐
- 热点推荐
- 360全景环视
-
360环视硬件平台为什么推荐使用米尔RK3576开发板?2025-09-19 2366
-
“上帝视觉”的360全景影像该如何选?2023-03-15 2600
-
360全景环视系统2022-10-25 1463
-
360°环视性能倍增!瑞芯微发布RK3588M智能车载全景环视方案2022-09-28 3325
-
360全景环视原理说明2022-01-17 3044
-
360全景环视发展历程2022-01-14 2347
-
360全景环视系统整体解决方案2020-03-26 7269
-
关于360全景环视系统技术简要分析2019-08-08 19526
-
VR技术线上展现全景智慧城市,为商家和用户提供全景多平台展现2018-06-25 1540
-
Full-HD 3D 360°全景环视与ADAS系统解决方案2018-04-10 14411
-
ST 360度环视开发平台2017-03-17 1418
-
看看汽车生产厂商都有哪些360全景环视系统2017-03-15 21112
-
环视全景摄像头应用在那些场合和起到作用有哪些2016-05-23 3884
-
360°全景可视泊车/行车记录(四路全景+行车记录仪+熄火震)2014-05-22 6572
全部0条评论

快来发表一下你的评论吧 !
