

全景环视原理说明
描述
总述
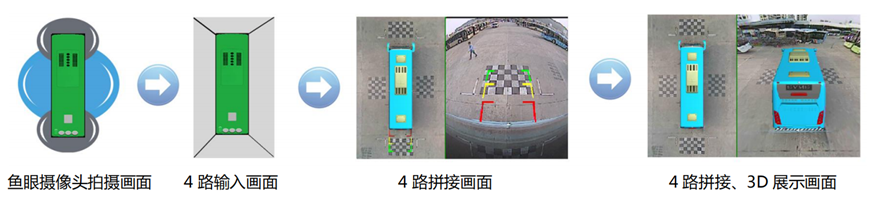
全景环视系统是通过安装在汽车前、后、左、右四个广角摄像头采集的车辆四周的实时画面,通过摄像头内参标定,外参标定,鱼眼图像畸变矫正,全景模型拼接,亮度均衡等算法,形成一幅准确的2D拼接的鸟瞰图。同时,在原有2D拼接图的基础上通过三维转换的算法,可生成任意角度的3D视角。依托2D和3D的实时画面,可完成全景环视系统的功能。
本文主要阐述内容有:全景环视算法说明、全景环视算法流程、全景环视算法模型以及全景环视标定方案。
全景环视算法说明
摄像头内参标定、外参标定
鱼眼图像畸变矫正
全景模型拼接
图像亮度均衡
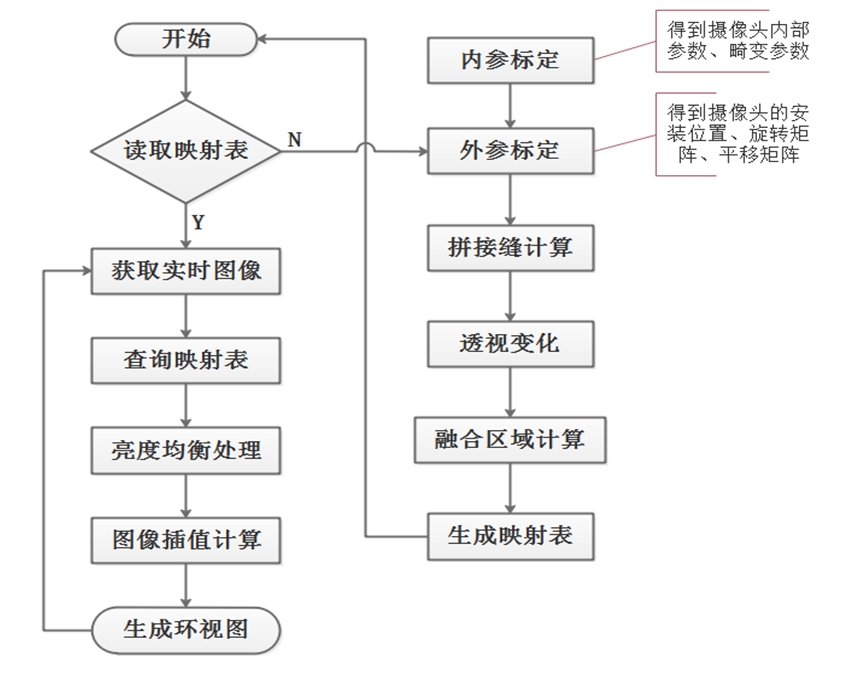
全景环视算法流程
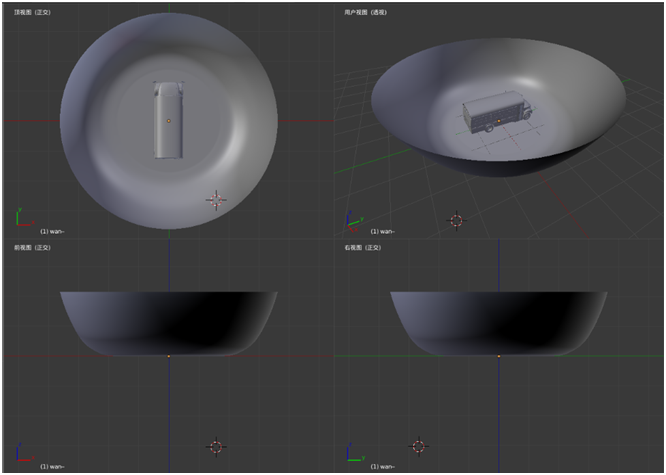
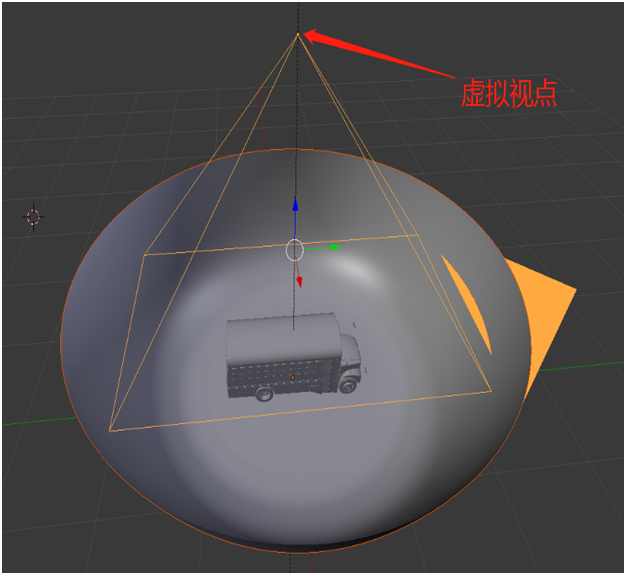
全景环视算法模型
全景环视标定方案
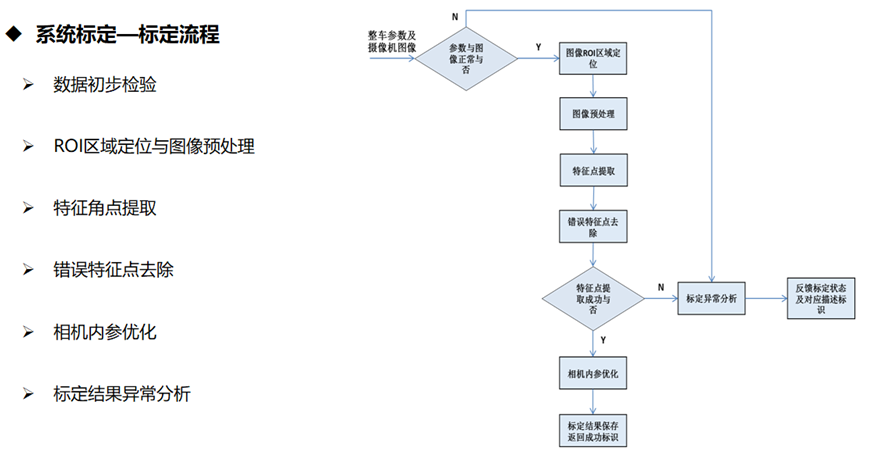
系统标定流程
系统标定手段
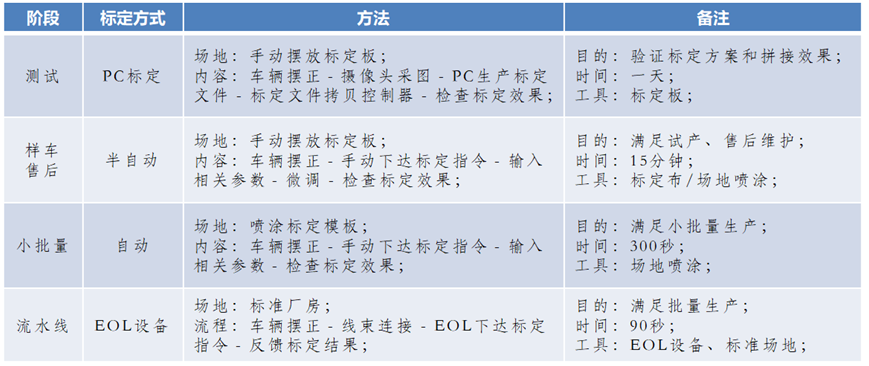
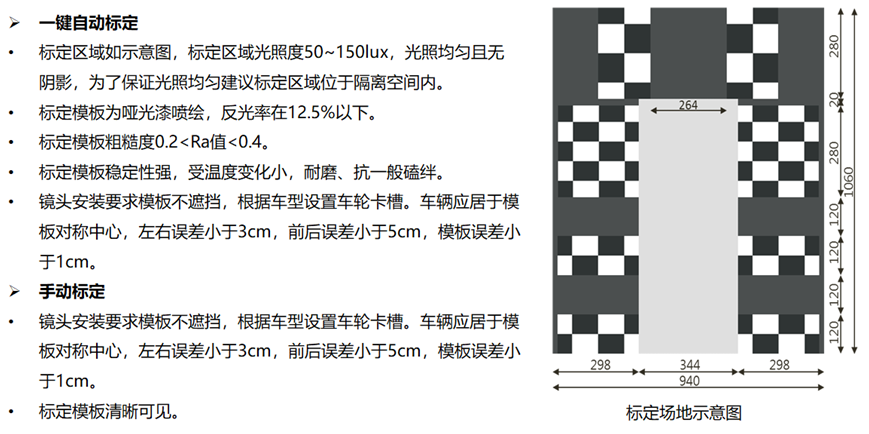
环视系统-量产标定方式
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
360全景环视系统2022-10-25 1463
-
360°环视性能倍增!瑞芯微发布RK3588M智能车载全景环视方案2022-09-28 3325
-
360全景环视原理说明2022-01-17 3045
-
360全景环视发展历程2022-01-14 2347
-
360全景环视系统整体解决方案2020-03-26 7269
-
瑞萨电子简化了用于车载全景环视摄像头系统的电源设计2020-01-08 1422
-
VR技术线上展现全景智慧城市,为商家和用户提供全景多平台展现2018-06-25 1540
-
Full-HD 3D 360°全景环视与ADAS系统解决方案2018-04-10 14411
-
看看汽车生产厂商都有哪些360全景环视系统2017-03-15 21112
-
瑞萨电子一体式ADAS全景环视解决方案套件详解2017-02-10 695
-
瑞萨电子推出一体式ADAS全景环视解决方案套件2016-11-14 1829
-
环视全景摄像头应用在那些场合和起到作用有哪些2016-05-23 3884
-
瑞萨电子推出的ADAS全景环视套件助力全景环视应用的开发2015-10-23 1470
-
360°全景可视泊车/行车记录(四路全景+行车记录仪+熄火震)2014-05-22 6572
全部0条评论

快来发表一下你的评论吧 !
