

AGV小车是如何通过AGV激光导航仪识别反光柱坐标
描述
AGV小车定位原理——识别反光柱坐标
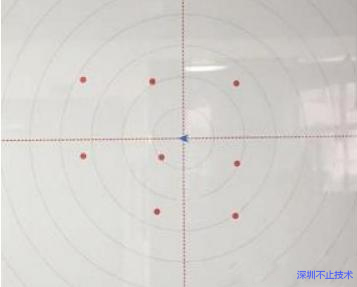
通过过滤反射系数,可以得到同一反光柱上多个激光点的详细数据(角度、距离、反射系数)。然后通过简单的数学计算和规律分析,就可以得到该反光柱相对导航仪的准确坐标。
AGV叉车定位原理——定位匹配
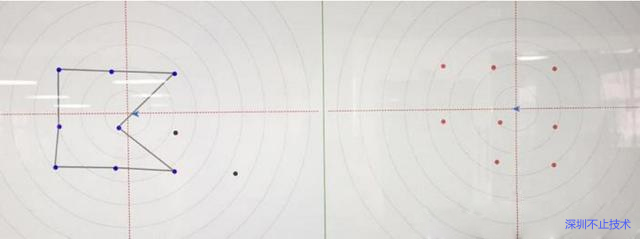
想要获得AGV激光导航仪坐标和角度,必须同时满足以下2个条件:
①AGV叉车导航仪至少可以扫描到3个反光柱
②叉车AGV导航仪扫描到的多个反光柱构成的图形,在已有地图数据中,可以成功匹配到相同构形。利用已有地图数据,结合即时扫描的反光柱坐标,反推出AGV导航仪位姿。
深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累。是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司,而且掌握了机器人移动底盘技术。在激光雷达核心硬件、专用芯片、AI算法上具有完整的自主知识产权
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自主导航小车AGV定位方法的研究[1]2016-08-29 8793
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8371
-
激光导航AGV的价格和国外的激光导航AGV大比拼!2017-07-31 7184
-
AGV小车上的无线应用2018-09-05 2416
-
AGV激光雷达SLAM定位导航技术2018-11-09 10101
-
AGV小车的充电方式2020-06-28 2767
-
方案|嵌入式核心板在AGV小车上的应用2021-09-30 1923
-
方案|飞凌FETMX8MP-C核心板在AGV小车的应用2022-01-08 4257
-
关于AGV控制系统使用中的应用笔记(二)——追加地图操作2023-03-13 1114
-
基于全局地图的AGV小车导航设计方案2019-10-04 4585
-
激光导航AGV小车打造的柔性化产线的优点有哪些?2020-03-14 1796
-
关于磁导航agv小车,它是由哪些结构组成的2020-09-03 2472
-
AGV小车RFID站点识别定位功能解析2021-09-01 2598
-
AGV小车方案设计—反光柱、充电站布局2021-12-20 1415
-
AGV小车的工作原理是什么?2024-12-19 2849
全部0条评论

快来发表一下你的评论吧 !
