

Loto实践干货(3) 测量CAN总线通讯数据
描述
最近在做运动控制卡的项目,调试样机的过程中,需要验证CAN总线通讯功能的正确性。以前只限于理论上认识CAN总线,使用的CANbus的通讯卡也是有上位机例程,基本上简单地配置上位机软件就可以正常工作了。这次调试需要深入测试CAN接口的通讯过程,正好把之前的对CAN的认识再复习深化一下。
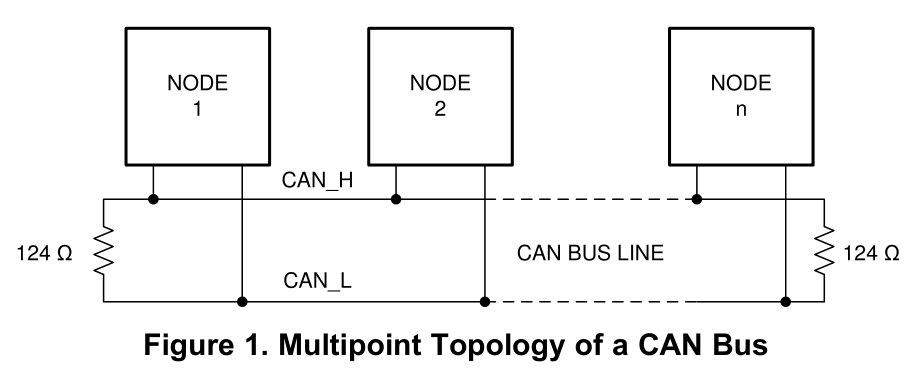
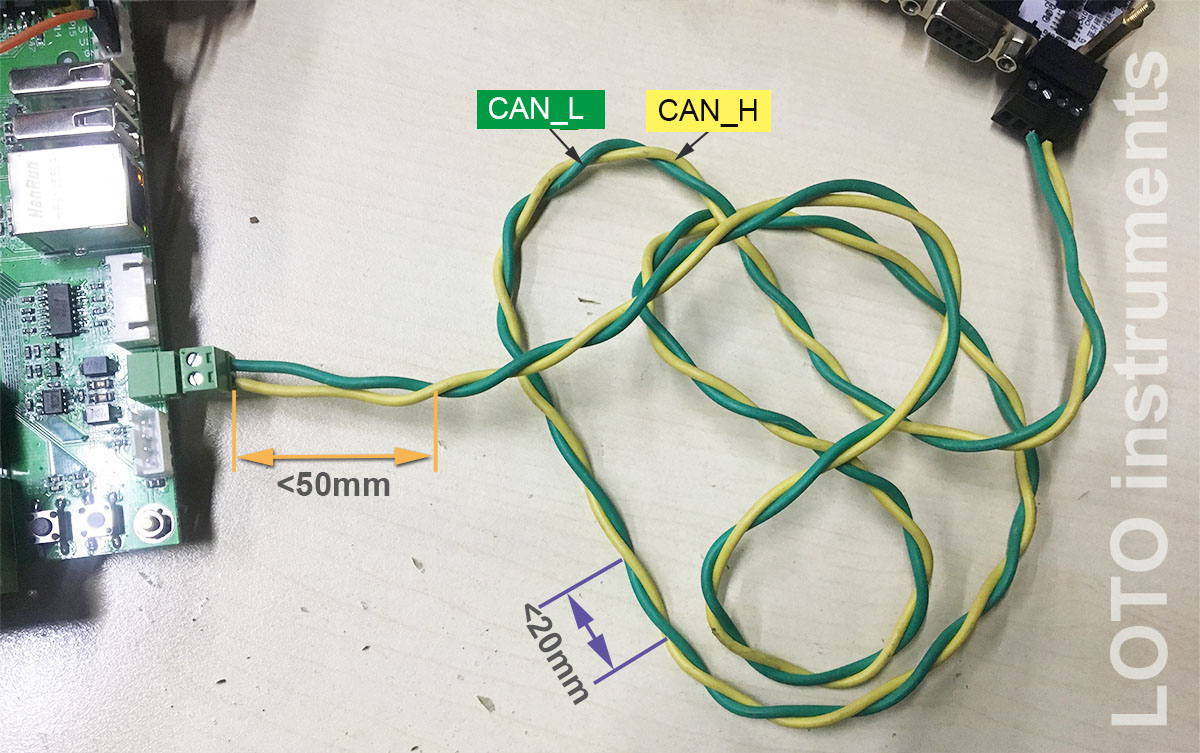
之所以采用CAN总线,是因为它只需要两根双绞线就可以连接多个通讯节点,并且可以传输相对远的距离,在工业现场抗干扰能力也很强。下图是我按照CAN总线的要求做的一条双绞线,黄色和绿色分别是CAN_High线和CAN_Low线。要求绞距20mm,不绞合的距离不超过50mm。
规定的双绞线传输距离与CAN总线的传输速率的关系如下表。我们的传输距离很短,所以可以采用很高的传输速率。即便是采用最高的传输速率,以OSC802示波器的25M带宽,也是足够调试用的。
| 位速率 bit/s | 总线长度 m | |
| 1 | 1M | 30 |
| 2 | 800K | 50 |
| 3 | 500K | 100 |
| 4 | 250K | 250 |
| 5 | 125K | 500 |
| 6 | 62.5K | 1000 |
| 7 | 20K | 2500 |
| 8 | 10K | 5000 |
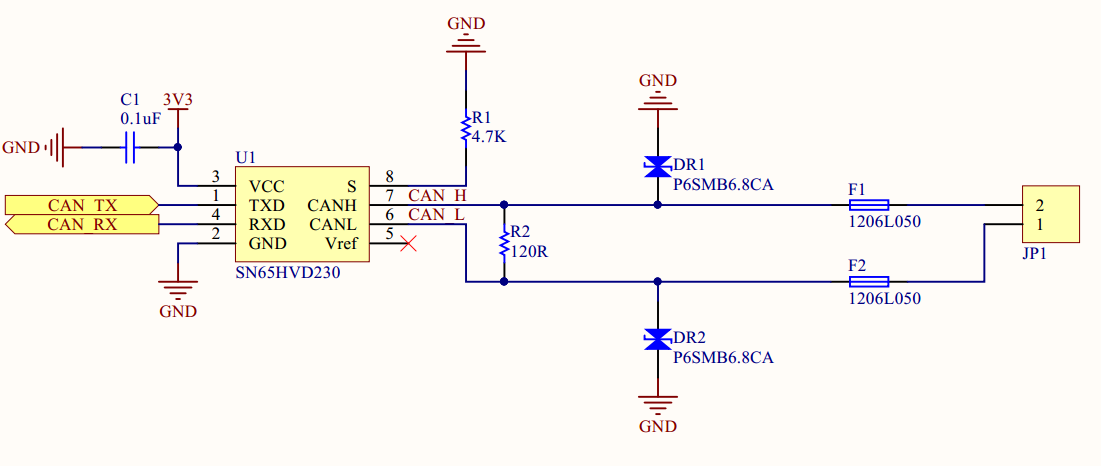
下图是我设计驱动控制板的CAN通讯接口部分的原理图,使用SN65HVD230收发器:
打样后的运动控制板是这样的:
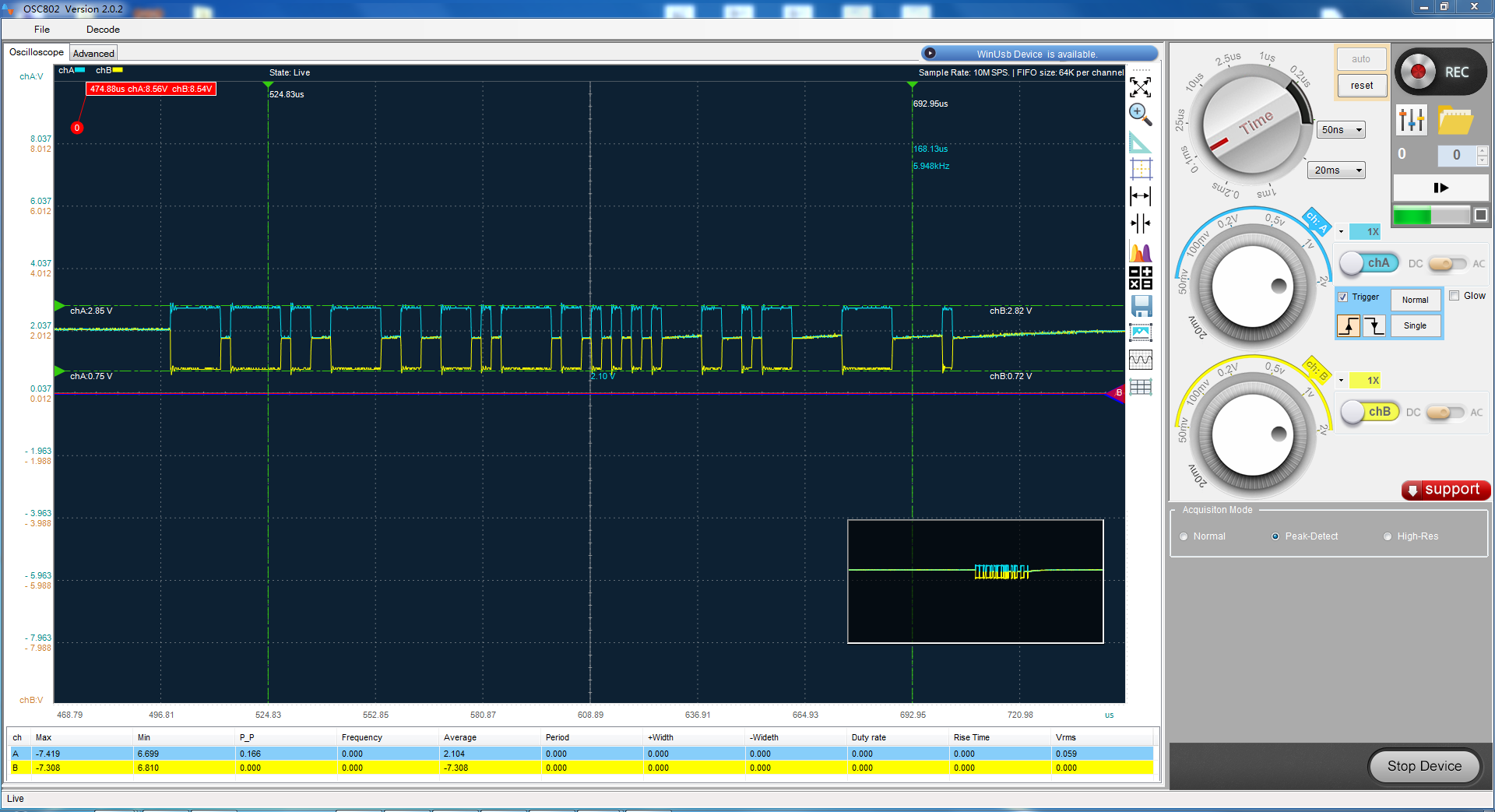
使用LOTO的USB示波器OSC802对CAN通讯的信号进行捕捉,抓取数据进行解析判断。
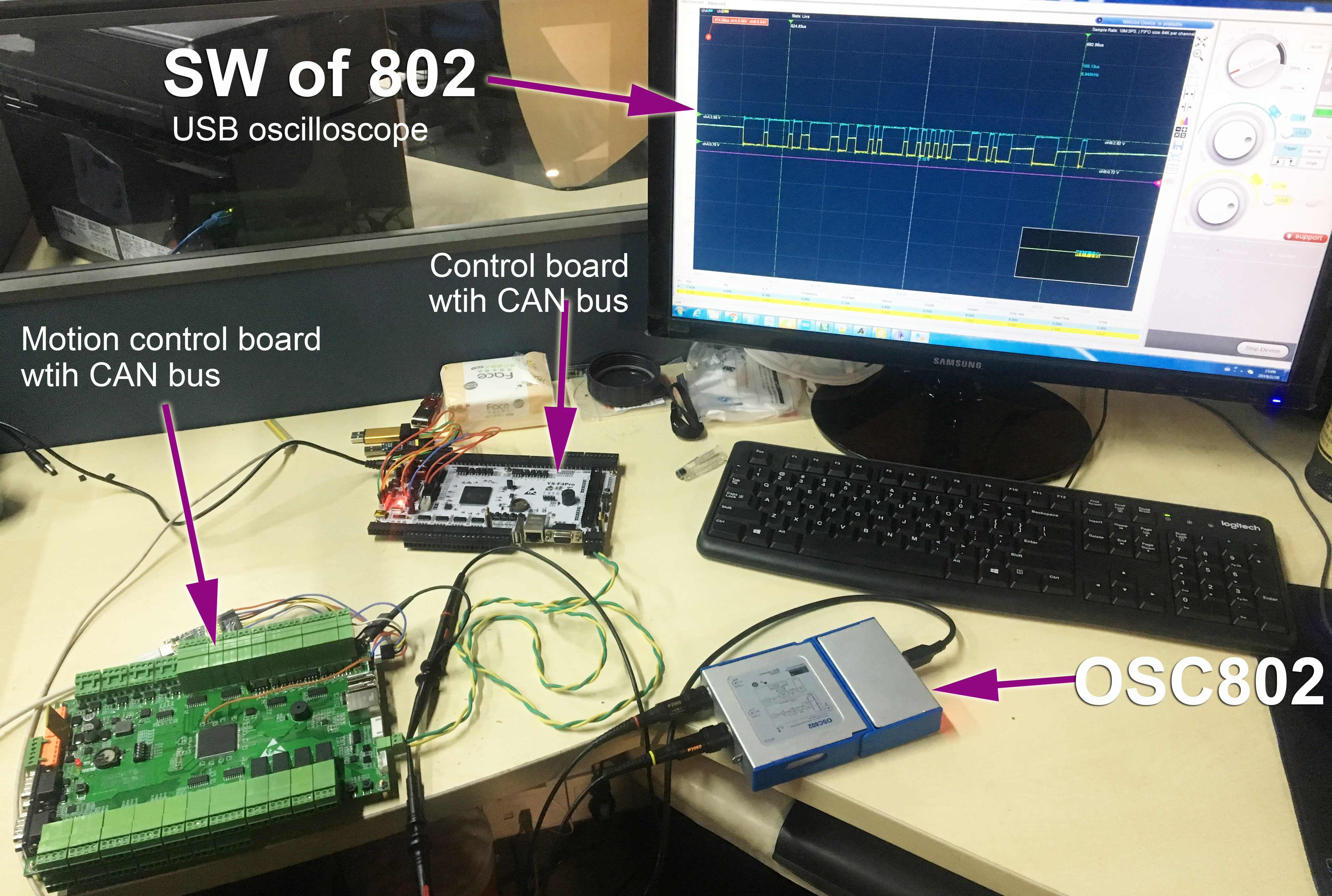
使用USB示波器OSC802的单次触发功能,很轻松对CAN总线上的电平信号进行了捕捉。不过我们现在还看不懂它,需要对CAN的电平逻辑和传输协议有所了解。
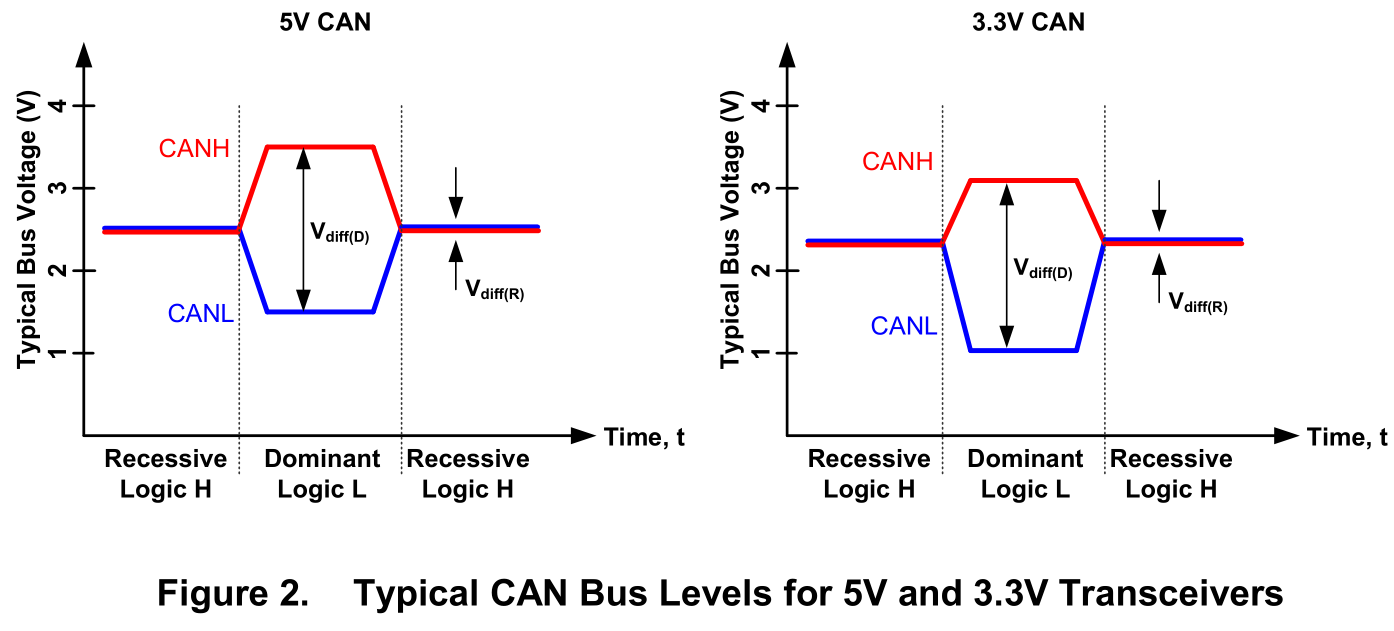
没有收发信号时,两条导线上的电平相同(大约2.5V)。这种电平状态为隐形状态,也称之为隐性电平,即为逻辑1。有信号时,CAN_H导线的电平升高至少1V;而对应的CAN_L导线电平降低同样值,这种电平状态为显形状态,也称之为显性电平,即为逻辑0。5V和3.3V的CAN收发器的逻辑电平会稍有不同。
我们通过程序发出一串CAN数据后,用OSC802捕捉到的波形如下:
根据波形进行数据解码需要注意的有两点:
1:在CAN协议中将CAN_H和CAN_L的差值为高电平时定义为显性,逻辑上表示为0,为低电平时定义为隐性,逻辑上表示为1。
2:在CAN的协议中当连续出现5个显性时就需要插入一个隐性。
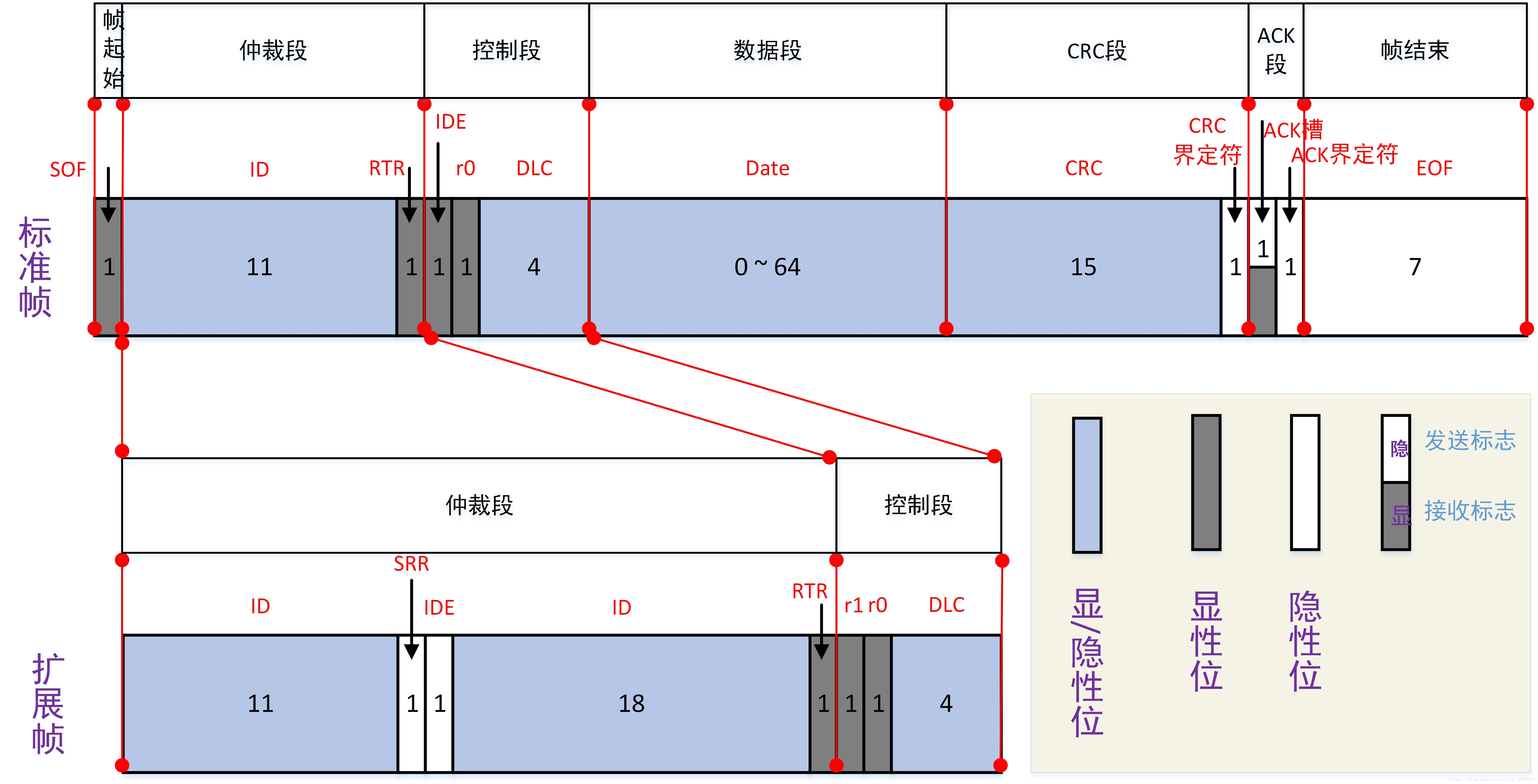
CAN的标准帧和扩展帧协议格式:
所以,波形数据解读为:
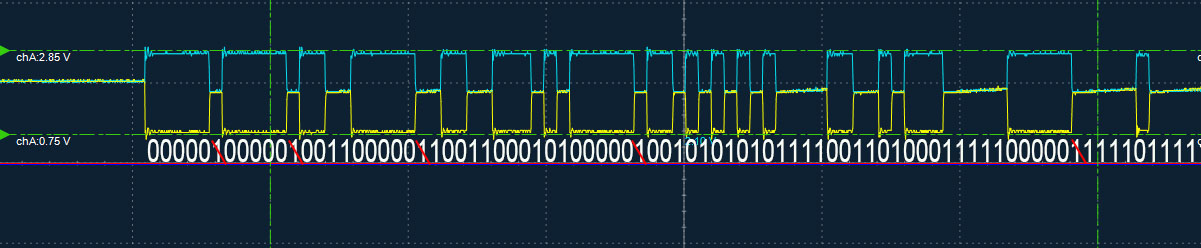
图中被红色斜线划掉的为CAN协议有意在5个连续显性后面加的单个隐性位,所以去掉。所以,通过USB 示波器 OSC802抓取到的数据为:
00000000000011000001001100010100000001010101011110011010001111100000111101111
| ID | SRR | ID | DLC | CRC | |||
| 0 | 00000000000 | 1 | 1 | 000001001100010100 | 000 | 0010 | 000111110000011 |
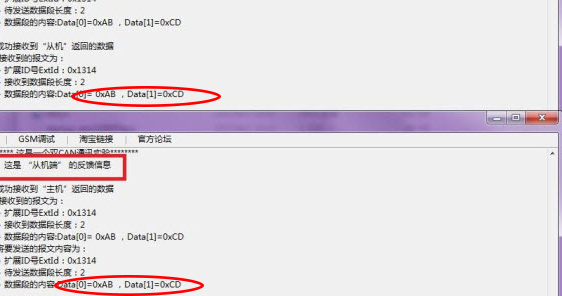
这个数据帧发出的数据为:
1010101111001101
0xAB, 0xCD
解析结果与上位机收发的结果互相验证正确,所以此次运动控制板的CAN接口功能调试成功完成。
-
虹科干货 | 带你全面了解“CAN总线错误”(三)——CAN节点状态与错误计数器2022-06-09 3989
-
Loto实践干货(3) 测量CAN总线通讯数据 精选资料推荐2021-08-20 845
-
基于S3C2410的CAN总线通讯设计与开发2021-04-20 1085
-
示波器测量CAN总线的数据帧2021-01-15 1480
-
Loto实践干货(9) 示波器测 晶振2020-07-03 3155
-
Loto实践干货(3) 测量CAN总线通讯数据2020-06-03 3294
-
CAN总线通讯平台开发2019-04-08 3076
-
CAN总线轻松入门与实践_部分22016-04-05 1275
-
CAN总线轻松入门与实践2014-12-30 6144
-
《CAN总线轻松入门与实践》2012-08-18 65996
-
基于DSP的电动汽车CAN总线通讯技术设计2009-12-23 1398
-
混合动力电动汽车CAN总线开发实践2009-11-26 20256
-
基于CAN总线的电梯串行通讯2009-06-25 913
全部0条评论

快来发表一下你的评论吧 !
