

让设备更高效、任务更流畅 — 科聪多智体调度管理软件
描述
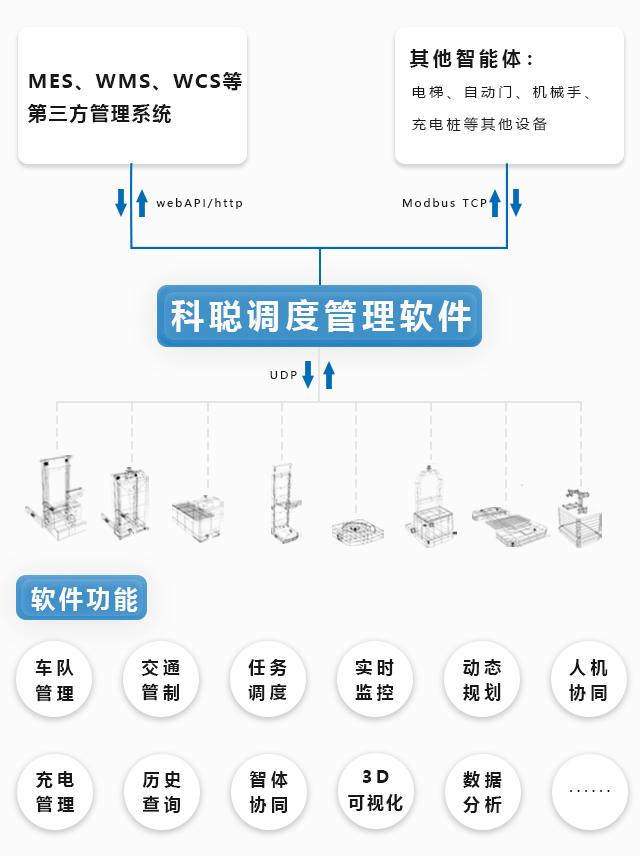
机器人调度监控软件(xRobotAGVMonitor)是专业的机器人调度管理系统,负责全部机器人的任务分配、调度及运行维护。系统采用多种调度算法,实现任务的最优分配、多机器人路径规划以及机器人交通管理,协调机器人集群协同工作,互相合作且互不影响,发挥最大效能。
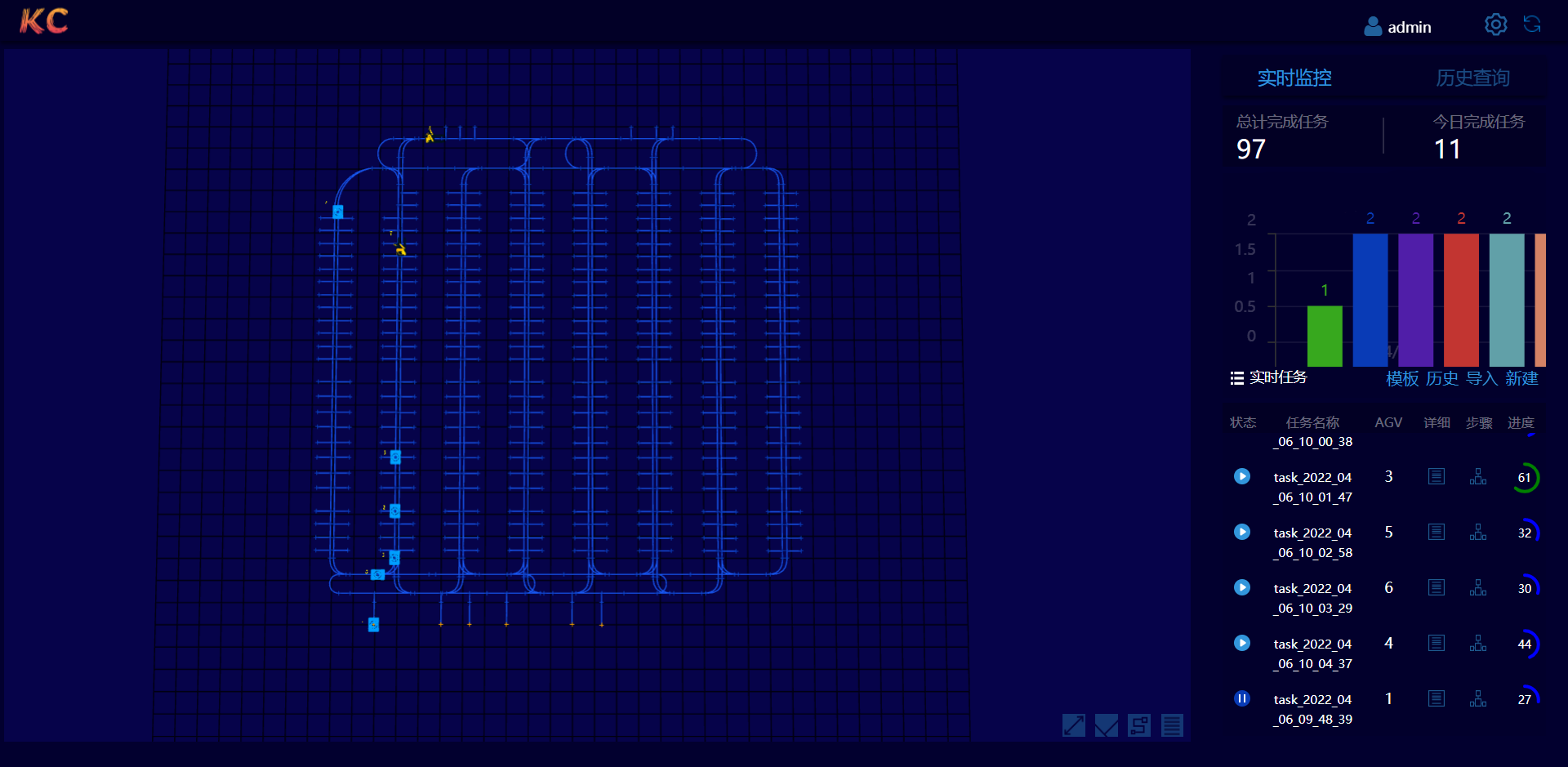
自主调度算法 让设备更高效
科聪自主调度算法,结合科聪车载导航控制器,让设备的控制跟运行更加流畅和高效。通过有效的任务调度、动态路径规划,让场景内每一种设备都能物尽其用,避免设备的闲置。甚至能减少各类设备的投入,为现场降本增效。
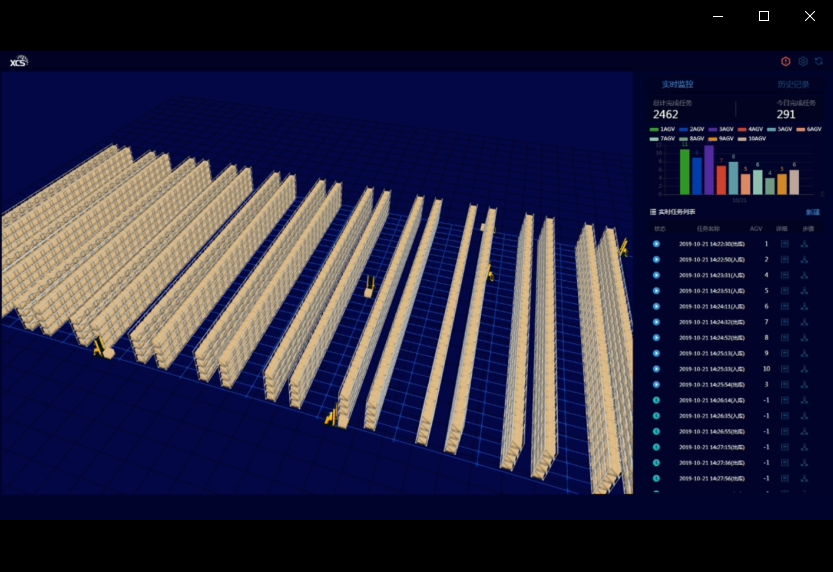
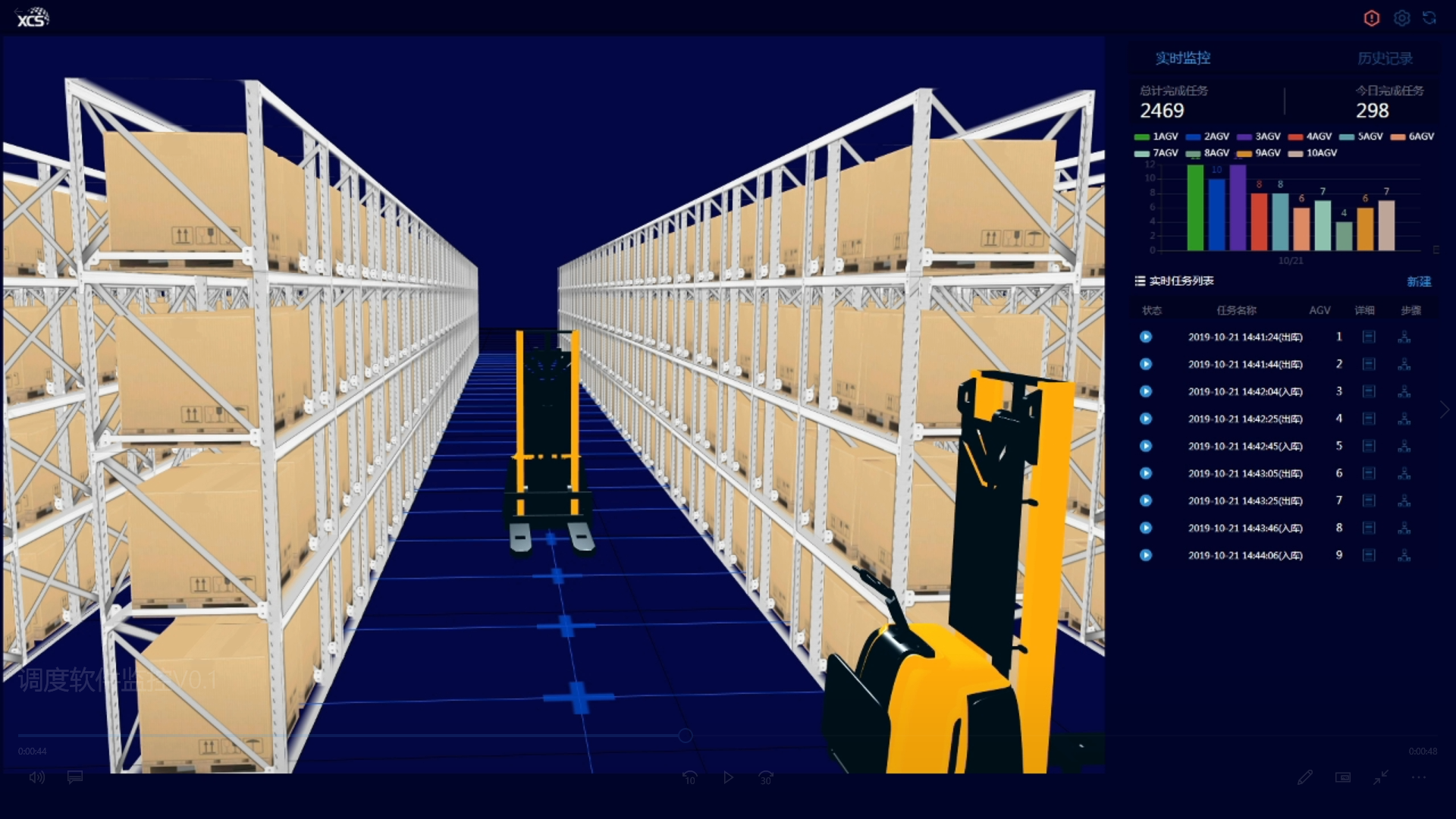
可选3D监控显示 状态信息一目了然
科聪调度软件提供现场一比一3D模型显示定制,现场运行状态、车辆状态、任务状态等信息一目了然。简洁明了的按钮功能设计,友好便捷的交互提示,让用户在图形化界面中完成对设备的配置与管理。
不同场景不同车型 统一调度
科聪调度软件支持基于科聪控制系统的各种车型同时调度,不论是叉式AGV、还是顶升潜伏式类KIVA小车,都能在不同场景中高效、协同、稳定的运行。最高支持4096台车辆同时调度。
应用现场中 多种智能体协同工作
科聪调度软件具有对智能机器人与智能机器人、智能机器人与自动化设备、智能机器人集群与集群间、智能机器人与人相互协同工作,从而发挥出移动机器人应用的最大效能。包括现场常见的电梯(升降设备)、自动门、机械手、充电桩等设备协同调度。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机场通信无杂音!A-29P 让候机与调度更高效2026-04-08 410
-
Kissflow Project:项目管理软件轻松管理营销活动2023-06-26 1272
-
移动机器人调度监控软件全面升级(三)2023-03-20 1387
-
移动机器人调度监控软件全面升级(二)2023-03-13 1177
-
UCOSIII的任务管理与任务调度和切换简述2022-02-18 1630
-
时钟管理软件硬件定时器区别是什么2022-01-17 1225
-
报警管理软件-总线报警系统管理软件案例2020-03-25 1957
-
项目管理软件在软件实施服务行业的运用2013-10-12 4824
-
ipod nano管理软件理下载2009-08-26 4417
-
基于多Agent的MES任务调度的研究与设计2009-07-30 780
-
国内CRM客户管理软件报价2009-05-05 3449
-
佳宜设备管理软件1.57(工业版)2009-02-27 570
全部0条评论

快来发表一下你的评论吧 !
