

X3派和PC虚拟机之间基于ROS2和wifi的通信
描述
背景介绍
多机通信是ROS的基础能力之一,相比于ROS1,ROS2通过非常简单的配置即可实现多机通信。
对于两个安装了ROS2(或者地平线的TogetherROS)的设备,设备的IP地址在同一网段,并且ROS_DOMAIN_ID相同(如果不设置,默认是0),即可实现设备之间通过ROS2通信。
下面介绍X3派和PC虚拟机都连接无线wifi网络的情况下,通过ROS2实现跨设备通信。
准备工作
X3派
- 已安装Ubuntu 20.0.4系统,安装方法:1. 快速开始 — 旭日X3派用户手册 1.0.0 文档 (horizon.ai)
- 已安装ROS2 Foxy,推荐安装地平线基于ROS2 Foxy深度优化和扩展的TogetherROS,安装速度更快。安装方法:2.2. 通过DEB包安装 — 地平线机器人平台用户手册 1.0 文档 (horizon.ai)
- 已连接wifi,连接方法:2. 系统配置 — 旭日X3派用户手册 1.0.0 文档 (horizon.ai)
PC虚拟机
- PC宿主机为windows,使用VMware workstation 15.5举例说明。
- 虚拟机已安装Ubuntu 20.0.4系统。
- 虚拟机已安装ROS2 Foxy。
操作方法
- PC宿主机断开有线连接,和X3派连接同一wifi。
- 虚拟机网络设置成桥接&复制物理网络连接状态:
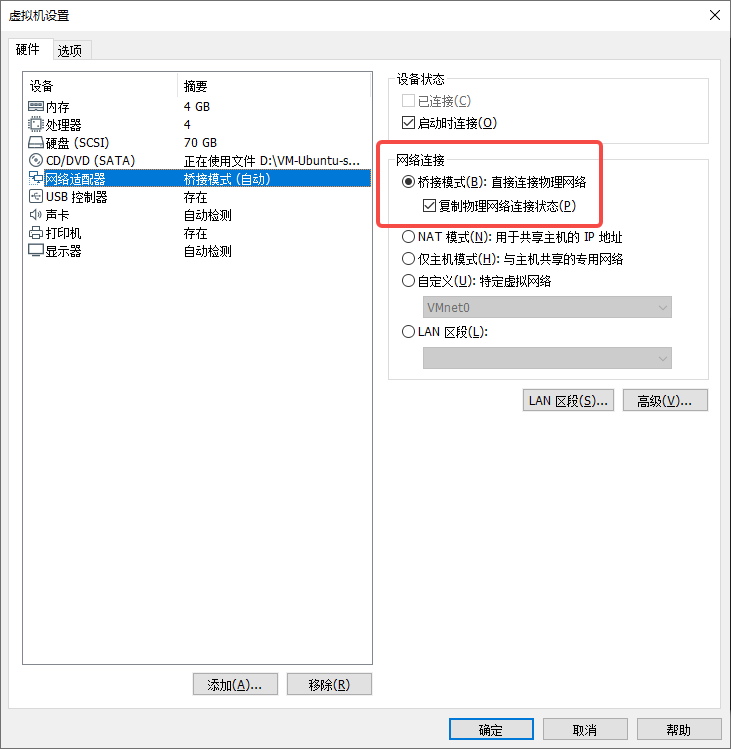
- 启动虚拟机。
结果分析
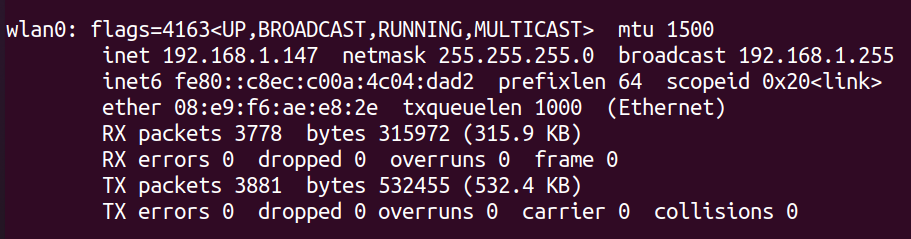
查看X3派的IP地址:
查看PC虚拟机中Ubuntu的IP地址:
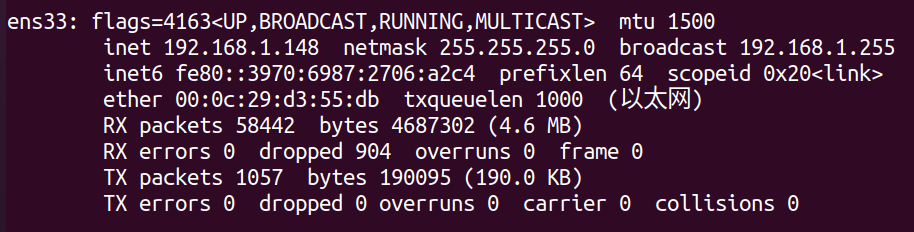
连接同一wifi后,X3派和PC虚拟机中Ubuntu的IP地址相同。开始测试X3派和PC虚拟机之间通过ROS2进行通信。
X3派发布消息:
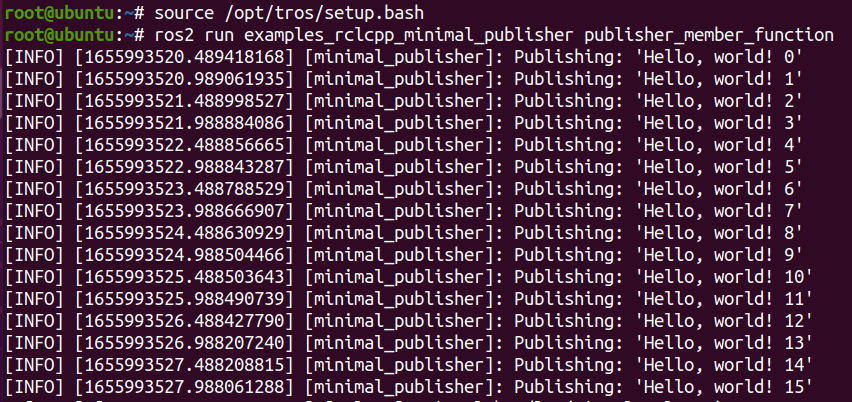
PC端订阅消息:
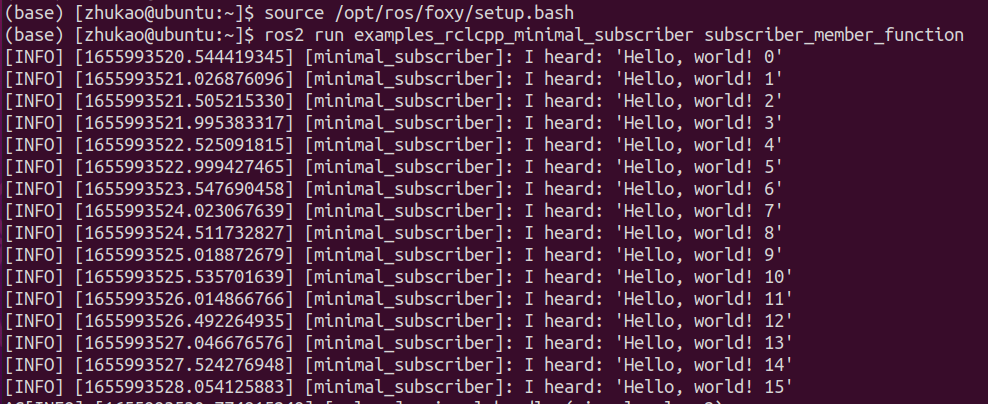
可以看到,PC端的ROS2 Foxy订阅到了X3派TogetherROS发布的消息,说明两个设备在连接同一wifi的情况下,通过ROS2跨设备通信成功。
本文转载自地平线开发者社区
原作者:zhuk
原链接:https://developer.horizon.ai/forumDetail/98129467158916230
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?2024-03-01 5847
-
请问虚拟机和PC之间互PING不通该怎么办?2019-10-15 1663
-
虚拟机ping不通PC2019-10-16 3355
-
如何在ROS2中运行小乌龟呢2021-11-05 2450
-
RT-Thread实时操作系统与ROS2是怎样进行通信的2022-04-01 3441
-
基于无线wifi网络的X3派和PC虚拟机通过ROS2实现跨设备通信2022-07-13 5429
-
旭日X3派首百尝鲜#开发环境搭建 Visual sttudio Code远程登入开发板做开发2022-07-28 6524
-
【 地平线旭日X3派试用体验】 HHP环境搭建及简单demo演示2022-07-31 6699
-
【 地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计2022-09-12 5457
-
教你一步步创建自己的ROS2工作空间应用2022-11-24 2276
-
【地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计2022-10-21 4685
-
DDS在ROS2中的应用2023-11-24 2408
-
ROS2中自带例程测试2023-11-28 2381
-
在TogetherROS中如何安装ROS2功能包2023-12-01 2960
-
ros2教程2025-05-23 381
全部0条评论

快来发表一下你的评论吧 !
