

CANape |Option Driver Assistance功能详解
描述
一、前言
随着汽车辅助驾驶技术的不断进步,汽车上使用的传感器和控制器也越来越多。许多新车型都已经搭载了5个毫米波雷达、10个以上的自动驾驶摄像头、1个车内驾驶员检测摄像头、5个激光雷达等传感器,这些传感器的数据量无疑是巨大的。那么在多传感器数据融合和算法验证的过程中,如何才能做到多传感器数据的同步记录以及算法的快速验证呢?
Vector作为全球可靠的汽车电子研发伙伴,在CANape的基础上提供了多传感器数据的同步记录以及算法的快速验证的功能— Option Driver Assistance,助力于汽车辅助驾驶技术的研发与测试。
二、功能特点
1、多传感数据高速同步记录技术—DHPR
在驾驶辅助系统和自动驾驶车辆的开发过程中,需要尽可能多的将原始传感器数据同步记录下来,用于数据回注来测试新的软件版本。但是雷达和视频传感器的数据量是特别大的,一台记录仪通常达不到如此大的数据带宽要求,需要多台记录仪进行级联来满足数据带宽。Option Driver Assistance提供了DHPR ( Distributed High Performance Recorder)技术来解决多台记录仪之间的数据时间同步、触发同步等问题。
多台记录主机由CANape通过TCP/IP控制。整个数据记录任务可以很容易地分布在多台记录主机上,实现多传感器数据的同步记录、同步触发。

图一 DHPR示意图
2、ADAS传感器的验证和可视化功能
此功能是 Option Driver Assistance的核心功能,可以将传感器检测到的目标对象以图形符号(如矩形、多边形)显示在不同的显示窗口中。且此功能无论是在测量过程中,还是在离线数据分析的过程中都可以使用。
可以将与传感器同步记录的参考摄像头的视频作为验证传感器数据的基础,对参考摄像头进行标定,并将传感器坐标轴和参考摄像头坐标进行关联。传感器输出的目标物坐标,就可以显示在参考图像的相应位置上,以此来快速验证传感器的输出目标。如果需要多视角查看传感器输出的目标物,传感器对象也可以在一个三维的,自由配置的场景窗口(scene window)中显示。
这种传感器数据与实际情况之间的直接比较可以让您快速、可靠地验证传感器数据的质量。

图二 目标物叠加显示
三、运用
1、基于测量信号创建目标对象
传感器一般通过几个信号来描述对象,例如坐标、大小和类型等。根据传感器的不同,这些信息以不同的方式进入CANape软件;如通过CAN、FlexRay、以太网、串口等总线发送基于信号的对象描述、或者基于特定协议传输进入CANape,在CANape中对相关信号进行解析后都可以使用。
CANape中的信号—对象适配器提供了方便的接口。信号可以在测量过程中分配给在线的对象,也可以从测量数据中分配给离线对象。创建的测量对象能以结构体的形式保存在测量文件中,在离线分析时可直接使用。
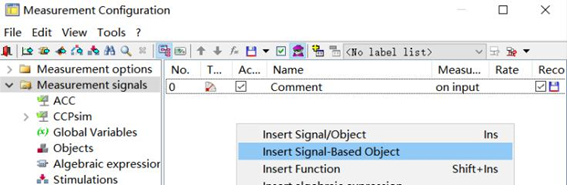

图三 创建目标对象
2、给目标对象选择显示元素、窗口并关联参数
将目标对象和显示元素之间的映射是在GFX编辑器中配置的。
在GFX编辑器有许多预定义的显示对象,如点云、十字符、正方形、三角形、多边形、曲线、位图、CAD模型等。并且每个目标对象都可以被分配一个合适的坐标系统,比如地理坐标、笛卡尔坐标、像素坐标。
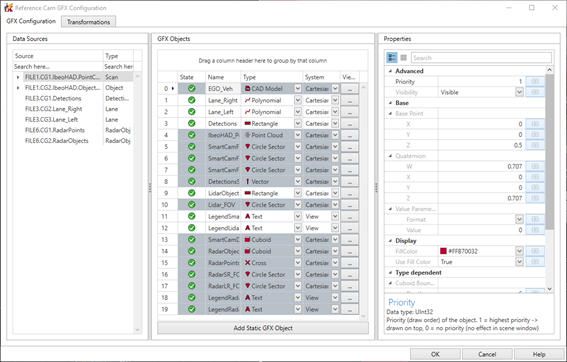
图四 GFX编辑器
3、效果展示和评估
数据对象表示为图形元素并叠加在其他信息上
▲在视频、场景或地图窗口中同步显示图形元素和评估对象信息
▲在测量或数据分析期间,可以通过ADAS Explorer窗口中控制各个窗口中单独激活或禁用对象,以优化显示效果
▲文本和参数值(如距离和速度信息)可以作为附加信息绘制在固定或可变像素位置
▲可以为目标对象显示额外的文本和数字信息,如编号和传感器标识
▲场景窗口提供任意缩放和旋转功能,方便进行评估
▲可以调整所有目标对象参数(大小,颜色,文本/数字字段等),方便进行标记
▲激光雷达传感器(如Velodyne、Ibeo和Quanergy)的测量数据通过场景窗口可视化,在场景窗口中三维显示接收到的点云数据
▲可以在展示窗口中点击单个图形显示元素,从而获取它的原始数据
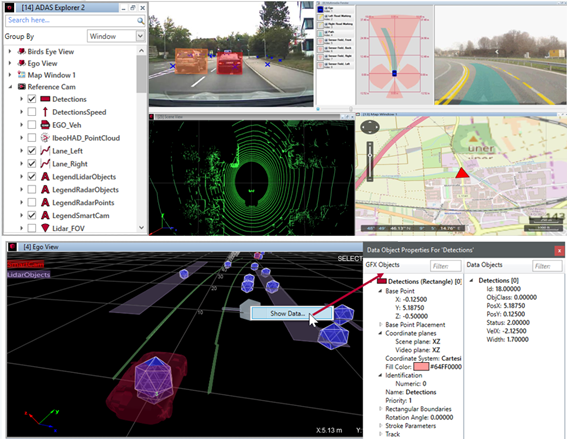
图五 效果展示
4、摄像头标定
只有在视频图像中叠加显示目标对象时才需要进行摄像头标定。为了将目标对象数据作为图形元素显示在视频窗口中,需要在空间坐标和像素位置之间进行坐标转换。只要系统配置(相机或镜头类型)不变,标定过程只需要一次。
摄像头标定分为内参标定和外参标定两大部分。均在CANape软件提供的Camera Calibration Tool中完成;内参标定需要用到黑白棋盘格和测距仪,将棋盘格的参数填入标定工具并在摄像头视野3到5米范围内进行多次识别。
外参标定是将参考相机的坐标和传感器的坐标进行统一,并使用测试对象验证标定效果。
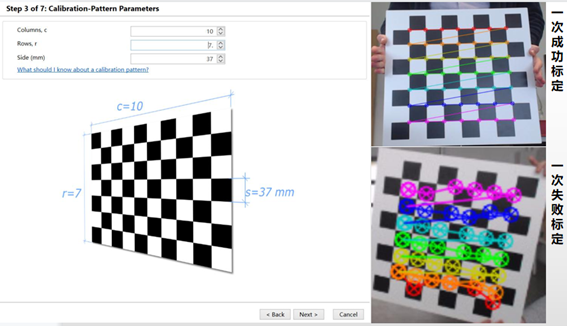
图六 内参标定
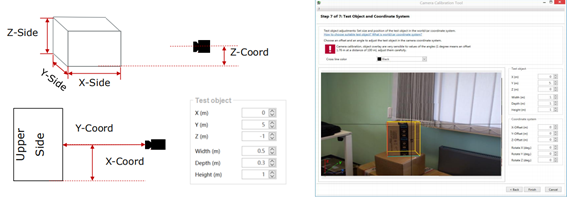
图七 外参标定
四、总结
Option Driver Assistance是CANape的一个扩展模块。有两大功能,一是提供DHPR分布式高性能记录功能,通过TCP/IP的控制方式,实现了多传感器、多记录主机之间的同步记录和触发问题;二是提供ADAS传感器的验证和可视化功能,可在多窗口中叠加显示传感器输出的目标信息
- 相关推荐
- 热点推荐
-
CANape因电脑存储空间不足无法启动测量2025-11-28 1295
-
CANape报错无法启动测量2025-11-04 1052
-
CANape的CASL工具箱2025-10-29 916
-
CANape培训视频 |CANape的标定、刷写功能#CANape北汇信息POLELINK 2025-06-24
-
CANape 22.0惊艳亮相!全面升级的新特性引领汽车测试技术飞跃!2024-03-07 1652
-
CANape/vMeasure exp控制OUTMM输出PWM波的方法2023-10-07 2514
-
Option的基础用法2023-09-20 4482
-
CANApe的使用教程总结2022-10-17 31949
-
CANape 20更新2022-08-04 2773
-
CANape19.0新版本新特性2022-08-01 3411
-
Capital功能选项Option的实际设置实例2021-01-12 1345
-
诚聘canape兼职讲师2018-01-25 2052
-
关于vector canape标定软件2018-01-16 12066
-
Driver Assistance System: Adap2009-01-23 969
全部0条评论

快来发表一下你的评论吧 !
