

连接SIL环境的开源库
描述
为了避免在后期开发阶段出现代价高昂的问题,目前开发流程在测试方面倾向于左移方法,即提前介入测试。对于ECU的开发,这意味着在SIL环境中使用虚拟原型尽早执行系统级测试是必不可少的。在不同的开发阶段,需要不同类型的虚拟化工具或模拟器工具,如何保证不同厂家的虚拟化工具或者仿真测试工具能够进行联合仿真和测试呢?对此,Vector为您提供开源的SIL套件。
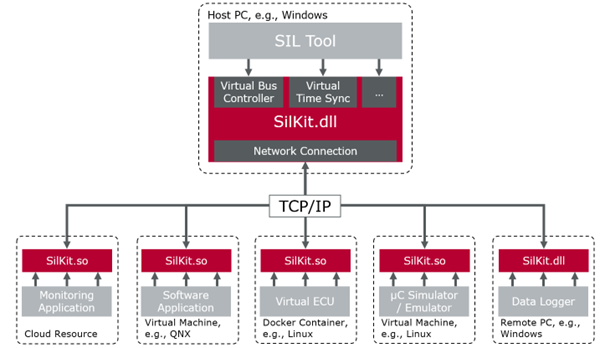
Vector提供的SIL套件是一个开源库,可将被测系统(SUT)连接到不同开发阶段所需要的各种抽象级别的模拟器、测试工具或模型,从而实现分布式仿真及测试。SIL套件的开放架构及其稳定的接口为独立于工具供应商的互操作性提供了标准。即使多个供应商的仿真或测试工具部署在同一台PC上或分布在多个虚拟机甚至云中,SIL套件也可以实现无缝连接。该套件以C++实现从而确保与广泛的操作系统兼容,例如Windows、Linux和其他UNIX衍生产品,如QNX。
该套件具有三层体系架构,如下图所示:
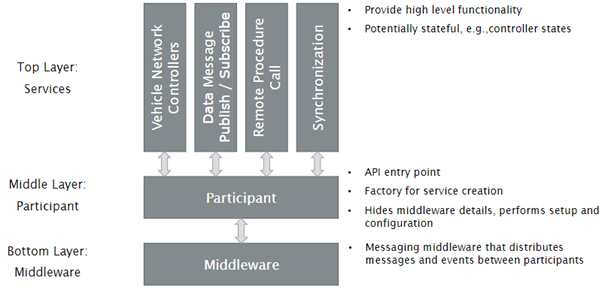
目前该套件支持的服务类型如下:
>
Vehicle Network Controllers: CAN/CAN FD, Ethernet, FlexRay, and LIN
>
Data Publish/Subscribe: without any data type constraints
>
RPC Servers/Clients: for remote procedure call functionality
其应用方式如下图所示:
该套件主要特性:
>
不同抽象层的通信
支持CAN/CAN FD, Ethernet, FlexRay, LIN
支持任意应用程序数据消息的发布/订阅
RPC
>
虚拟仿真时间同步
>
控制和观测仿真系统执行的状态
初始化、启动、停止和关闭
>
可通过yaml/json文件配置仿真参与者行为
>
Health监测和记录
用于错误处理和调试的系统状态
看门狗机制
SIL套件程序间的连接状态监测
分布式系统记录
CANoe本身也支持SIL套件,并且可与任何其他使用SIL套件的工具(例如 vVIRTUALtarget、CANoe4SW SE)进行协同仿真,甚至可以从桌面CANoe实时监控正在运行的CANoe4SW SE仿真和测试。
-
国民技术MCU产品STL软件测试库获得IEC 61508 SIL 3功能安全证书2026-05-08 1746
-
PSoC 4-IEC 60730 B级和IEC 61508 SIL安全软件库2025-04-19 798
-
开源数据库迎来拐点|2023开放原子全球开源峰会数据库分论坛成功召开2023-06-15 1722
-
开源数据库迎来技术创新拐点|2023 开放原子全球开源峰会开源数据库分论坛即将启幕2023-06-01 1119
-
开源数据库迎来技术创新拐点|2023开放原子全球开源峰会开源数据库分论坛即将启幕2023-05-31 1230
-
SIL定级时如何提前判断SIF能否实现?2023-03-22 5404
-
MongoDB开源文档数据库的安装2022-12-06 2228
-
MELSEC iQ R通道间绝缘数 模转换模块SIL2诊断FB库参考2022-08-24 717
-
怎样使用开源库文件S7.NET.dll去连接西门子PLC2021-08-31 4365
-
如何使用STM32 HAL库移植SFUD开源库2021-08-11 1950
-
Embedded-Architectures-and-Mixed-SIL2018-01-25 2966
-
如何在 SIL9134 芯片上用 zynq qt 环境?2017-06-01 4246
-
什么是DLL (动态连接库)2009-11-28 15779
全部0条评论

快来发表一下你的评论吧 !
