

智造之眼丨多目标定位抓取
描述
多目标定位抓取:相机一次性拍摄多个目标产品,视觉软件进行图像分析定位,将像素坐标转换为物理坐标,系统传递多个产品的物理坐标给机械手,机械手进行多位置正确取放产品。
01.多目标定位抓取优势
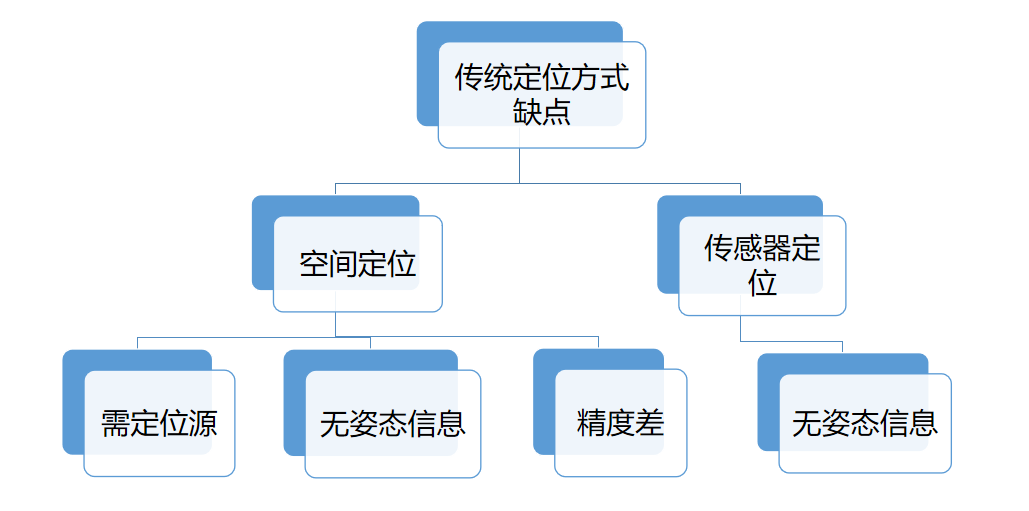
多目标定位抓取相对传统定位而言:可同时传递多个产品坐标位姿信息给机械手实现多位置抓取,大大提升工业生产的速度和精度。
02.多目标定位原理
坐标转换--四坐标系之间转换
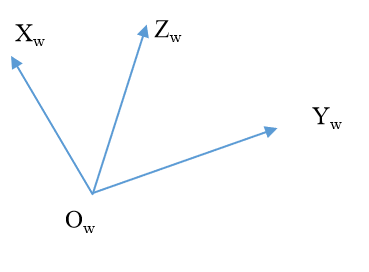
世界坐标系
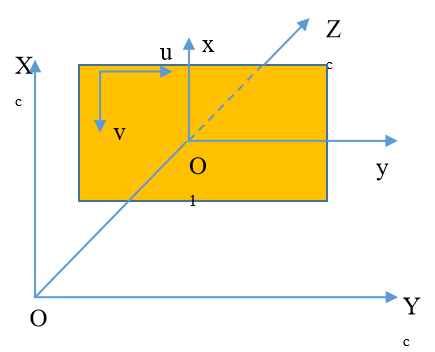
相机坐标系、图像坐标系与像素坐标系

四坐标系转换关系
03.多目标定位过程
视觉系统
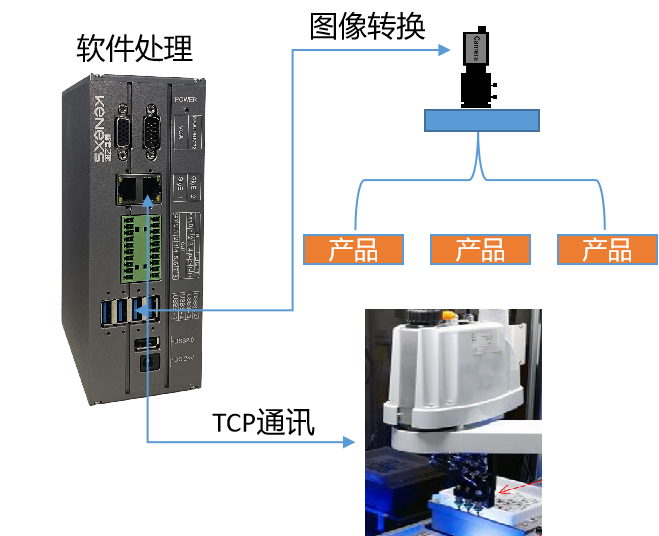
转换步骤
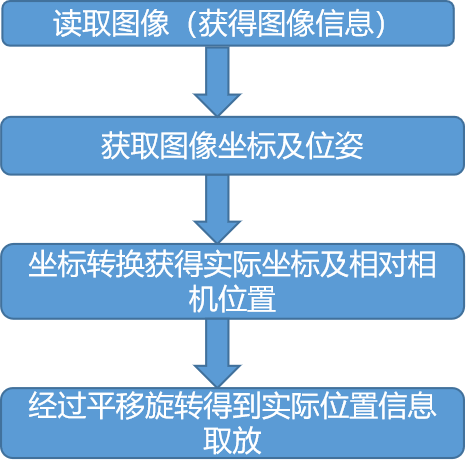
由此,机械手连接通讯获得位置坐标,实现多目标产品的定位抓取。
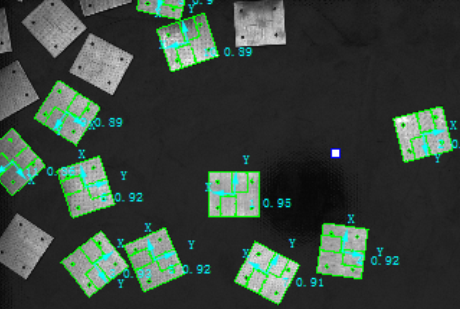
04.多目标定位抓取-算法运用
如何获取产品特征信息?
1、特征值提取(圆、圆环、矩形等)
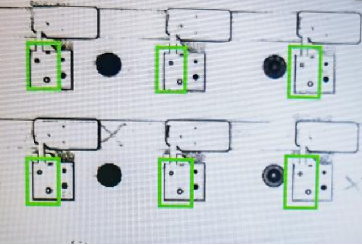
2、轮廓匹配法
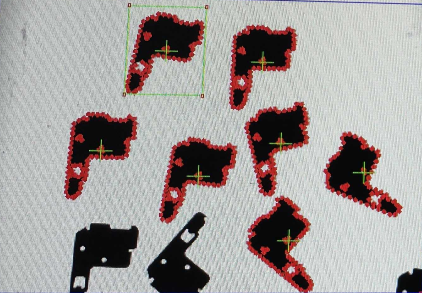
3、模型匹配法等
05.多目标定位抓取-工业应用
由于工业生产应用类型多样,实际定位不仅需要定位产品的位置信息,还需要定位产品的姿态信息。
工业生产应用类型
1、柔性振动盘机械手多位置抓取产品
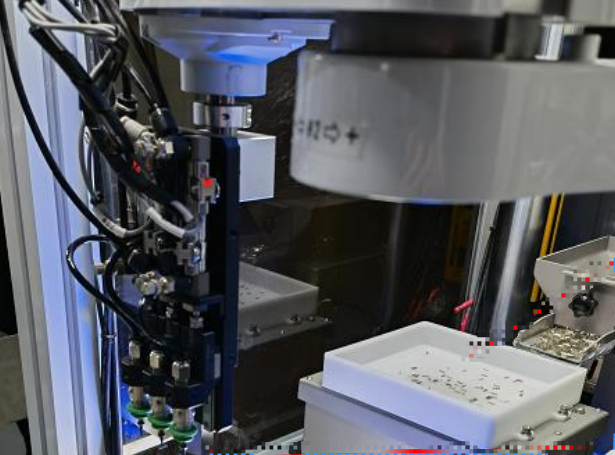
2、多位置旋转吸嘴多位置抓取

3、机械手四位置多产品抓取

智造之眼-应用数据
检测件:五金件
产品大小:约20X15mm
相机配置:500万~2000万
重复抓取精度:0.04mm
拍照处理速度:400~500ms
一次拍照定位数量:10~12pcs
专业做视觉,认真做研发。智造之眼视觉团队坚持突破技术,执着产品,深入应用,持之以恒的打造中国的视觉品牌,为世界提供又好又便宜的视觉产品和服务。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于Labview的目标定位以及机械控制2012-04-24 2838
-
一种双基地MIMO雷达快速多目标定位方法2009-11-13 819
-
基于无线传感器网络的目标定位算法研究2009-12-16 580
-
无线传感网络目标定位系统建模与仿真2010-01-18 959
-
多点测量提高海底目标定位精度方法2011-10-08 1044
-
仅依赖连通度的多目标定位方法2018-02-11 810
-
双雷达地面目标定位算法2018-03-13 1138
-
以色列人工智能目标定位系统实力如何2024-04-16 1531
-
智能目标颜色识别抓取丨国产Cortex-A55人工智能实验箱机械臂案例分享2024-08-10 1223
全部0条评论

快来发表一下你的评论吧 !
