

新功能发布 | TSMaster的MATLAB自动化控制模块
描述
前言
今天我们继续来介绍TSMaster新功能—MATLAB自动化控制模块。该模块提供了大量用于MBD开发的小工具。还包含了这个可以将c代码自动转化为stateflow代码的程序。
MATLAB的自动化对象
MATLAB automation object /
> 首先点击连接,连接到matlab的自动化对象,需要启动matlab的主程序,一旦连上之后,matlab程序就可以实时被TSMaster软件来控制。那么我们点击之后可以看到连接按钮变灰,然后断开连接按钮变成高亮,那么这个时候就可以通过我们的软件来控制matlab程序了。


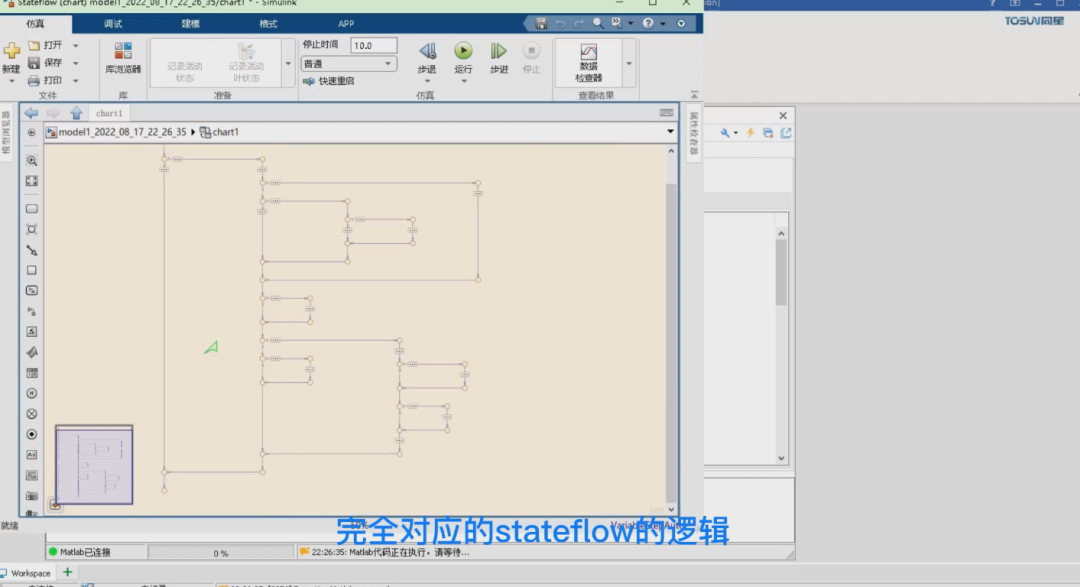
> 然后我们可以点击这个c代码转stateflow,点击解析,会实现一个逻辑树,然后再点击生成代码。这个时候我们就可以看到,我们的示例代码就可以自动转换成stateflow代码,该功能可以迅速的将已有的C代码的逻辑一键转换成完全等价的stateflow的逻辑,从而提高MBD的开发效率。那么转化完成的效果就是这样,双击chart1展开之后就可以看到跟刚才的c脚本完全对应的stateflow的逻辑。
SIL和HIL环境的自动构建
Automatic build of SIL and HIL /
只要我们拥有可以生成代码的Simulink的仿真模型,就可以通过此模块来实现该模型在TSMaster环境中的实时运行。从而让我们的算法可以在软件设计的前期就可以参与到HIL和SIL的实时仿真中来,同时有了小程序的加持,我们还可以对算法进行细致入微的调试、监控,甚至将二进制文件发布给其他的用户,进行联合仿真,那么具体如何实现呢?
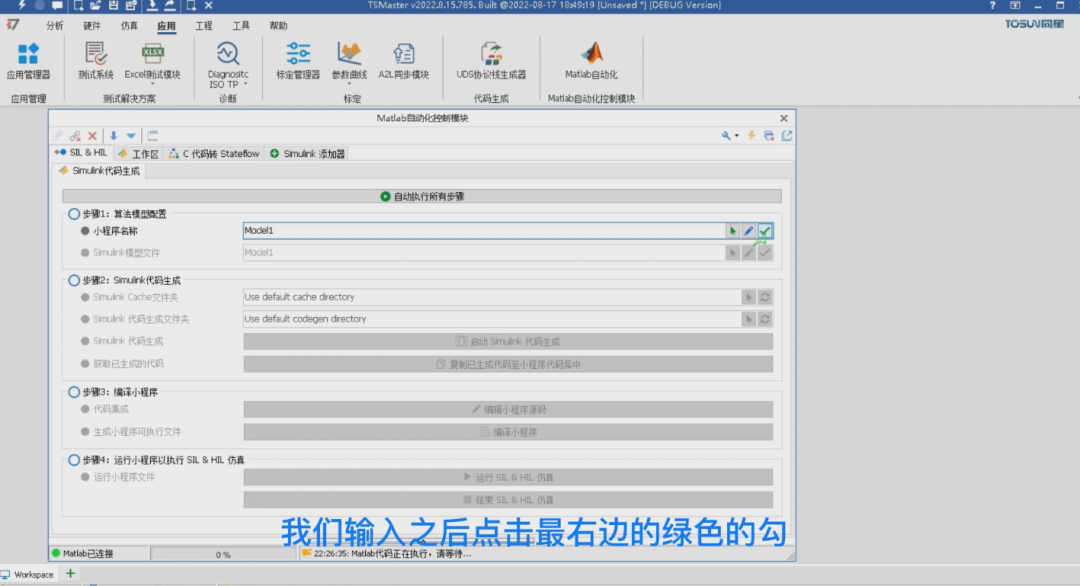
> 我们还是从0开始,举一个例子来说明:首先我们切换到第一个页面,SIL and HIL页面,可以看到这个页面有4个步骤,按照这4个步骤顺序执行,就可以迅速搭建一个HIL环境。那么第一步是算法模型的配置,他给了两个输入,一个是我们的小程序的名称,第二个是Simulink模型文件。对于第一个输入,只要给我们的新构建的小程序起个名字就可以了,比如说这个默认的Model1,我们输入之后点击最右边的绿色的勾,它的作用就是判断Model1是否存在。如果不存在就创建一个,如果存在就使用这个Model1。
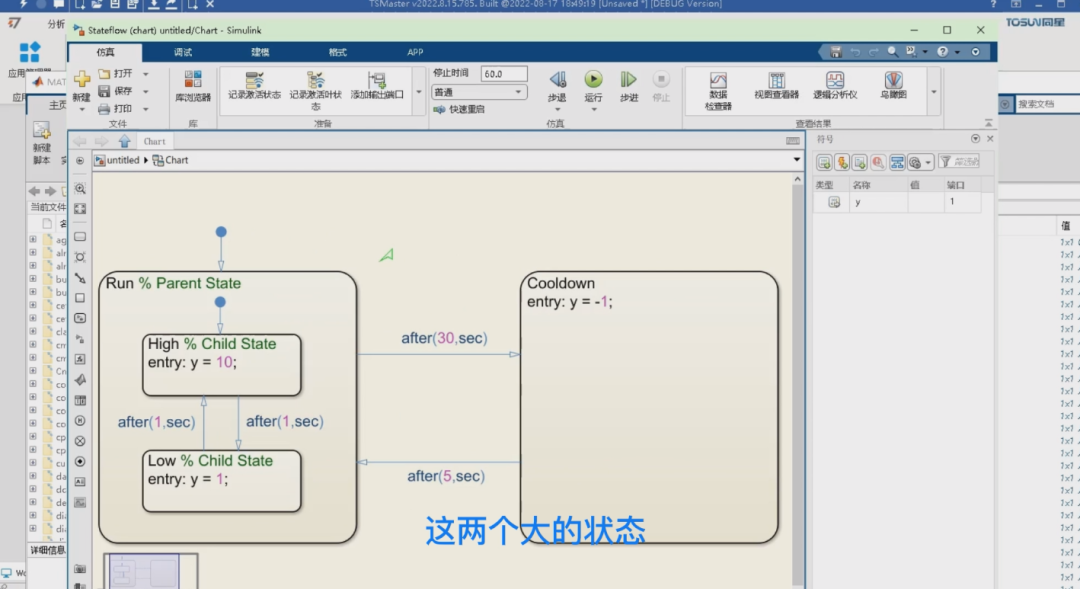
> 这样可以将我们新的算法集成到我们现有的小程序中,在这里就需要填入现有的小程序的模型名称,也就是从中可以选择我们的小程序名称。那么这一步成功之后,就来到了Simulink模型文件的设置过程。在此我们需要找一个Simulink的实例程序进行讲解,我们首先打开Simulink,在Simulink的启动页会有很多的实例。我们找一个比如展开这个stateflow,里面有空白图、简单图分层图等等。我们选择这个分层图,就打开了一个名为untitled的模型,我们看到这个模型,包含了一个run和一个cooldown。这两个大的状态run了30秒之后,会冷却 5秒,然后5秒之后继续run,从此循环往复,而在这个run的过程中,是每隔1秒就让输出在10和1之间切换,这就是当前stateflow的简单逻辑。
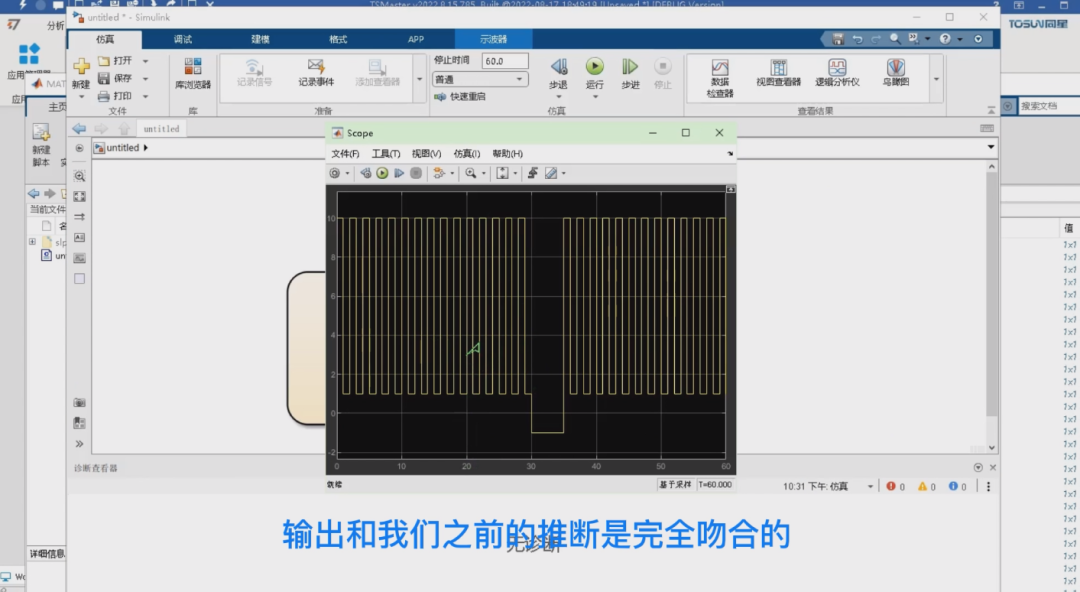
> 我们按esc返回到顶层,可以看到这个模型只有一个输出,我们加一个示波器来看看波形。按F5运行,当然这个运行需要将当前的工作目录切换掉,我们可以选择随便一个目录比如说新建个文件夹,然后我们回到刚才的模型按F5运行成功,那么打开示波器我们可以看到输出和我们之前的推断是完全吻合的。也就是运行了30秒之后休息5秒,然后继续运行。我们将这个模型另存为simple,接下来将这个示波器删除,并且添加一个out接口,将这个模型配置成可以代码生成的模型,随后我们就要配置一下代码生成的细节。
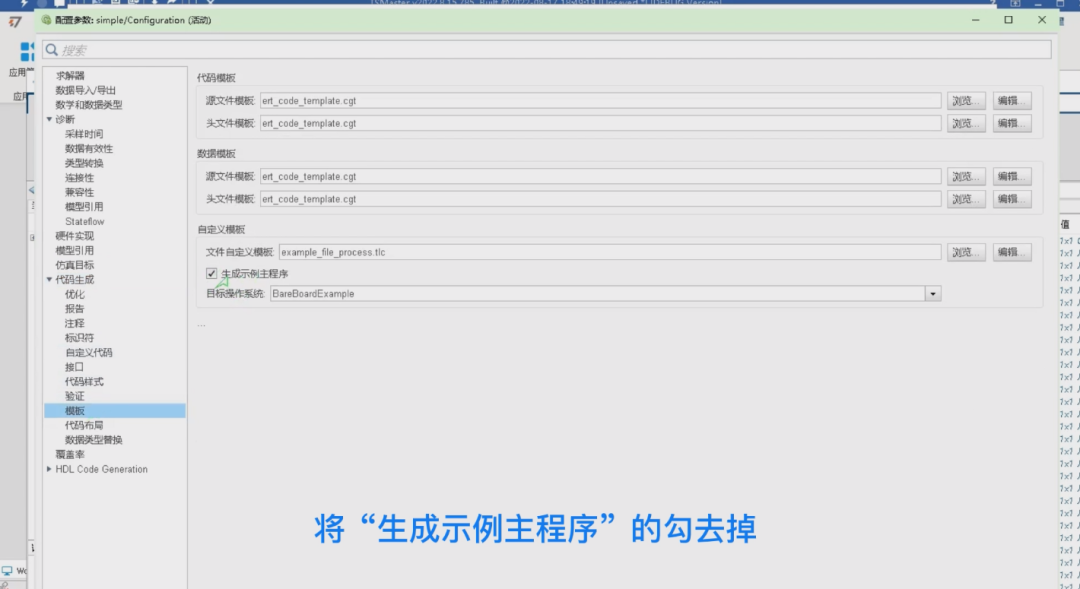
> 我们进入模型的设置,点击代码生成,首先要将这个grt改为ert.tlc。因为目标的环境是嵌入式环境,同时勾选仅生成代码,然后展开代码生成,进入到模板中,将“生成示例主程序”的勾去掉,这样就不会自动生成main函数。因为这个main函数的文件往往是不会用的。至此配置完成。我们点击保存并且关闭这个模型。
MATLAB控制模块
MATLAB Control module /
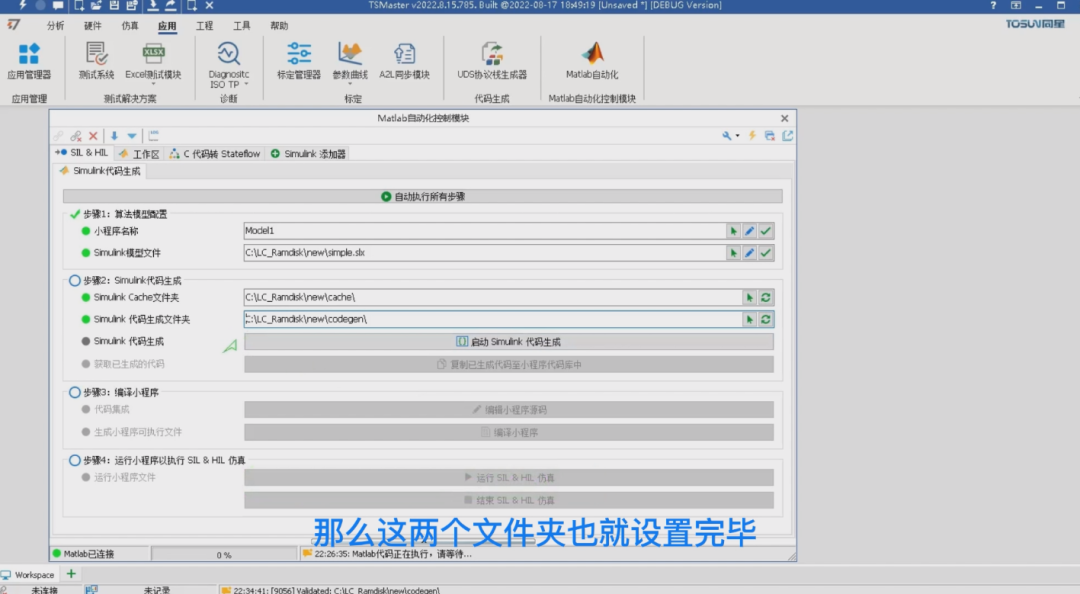
> 接下来就回到matlab控制模块中,选择Simulink模型文件,点击绿色的箭头按钮,选中我们刚才的simple.slx,那么可以看到前两步过了之后步骤1就算执行完成。接下来就到了cache文件夹和codegen文件夹的设定,那么留空就表示生成到默认的位置。我们可以将这两个位置改掉,还是点击绿色的按钮,然后可以选择我们的cache文件夹,我们可以新建一个cache,并且选择这个文件夹,那么cache文件夹就已经设置成功。接下来就是codegen,还是一样,我们可以在cache旁边建一个codegen,点击选择,那么这两个文件夹也就设置完毕。
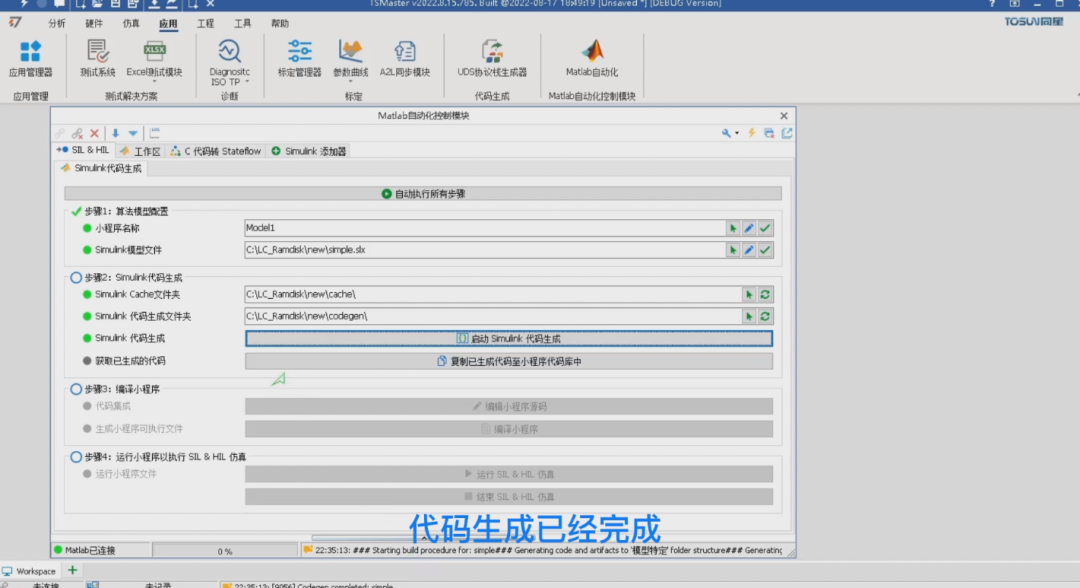
> 然后就到了代码生成的环节。我们只要点击启动Simulink代码生成,等待代码生成完毕就可以了。那么生成的代码就会存放到刚才设定的codegen这个文件夹中。第一次生成会耗费一点时间,我们需要耐心的等待。那么Simulink的执行过程是同步的,而且比较慢,所以TSMaster可能会报警。现在我们可以看到代码生成已经完成。
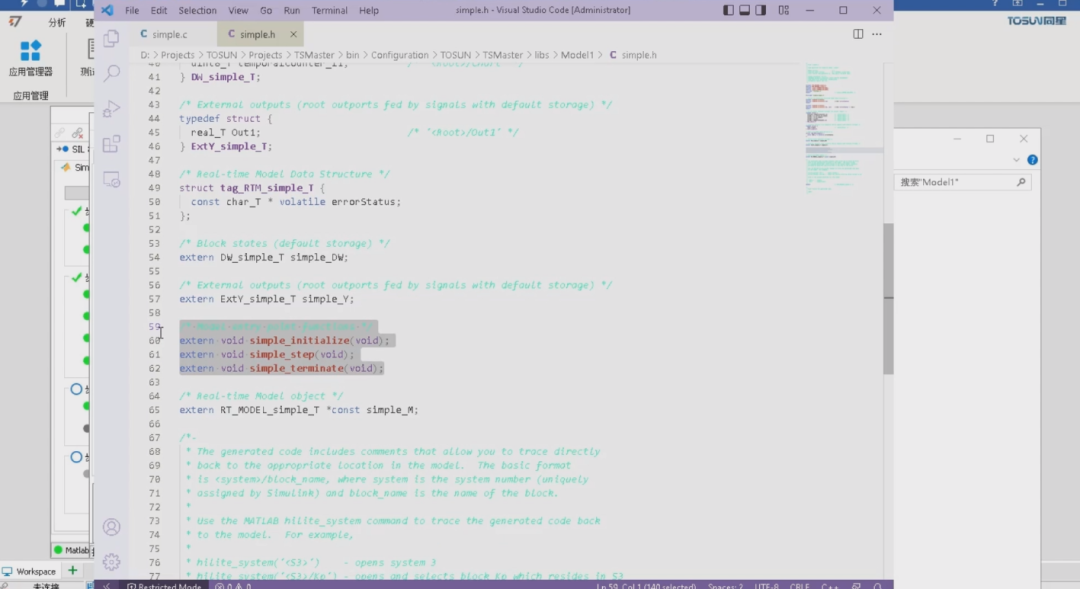
> 那么接下去就是自动复制已生成的代码到我们的小程序的代码库里面,点击之后可以显示已copy6个文件,那么接下去第二步就已经完成。也就是代码生成的过程已经成功实现,再往下就是代码集成。代码集成目的就是将算法给调用起来,我们点击编辑小程序的源码按钮,打开Model1这个小程序,我们首先看一下属性,然后点击代码库的路径,可以看到simple.c和.h文件以及其他的一些用到的头文件。打开这两个文件,首先我们看一下simple.h文件,那么这个文件是一个接口文件,可以看到这里面有三个函数,初始化step和terminate函数,我们需要分别将这三个函数的调用拷贝到Model1小程序里面。首先就是要用这个simple.h头文件。
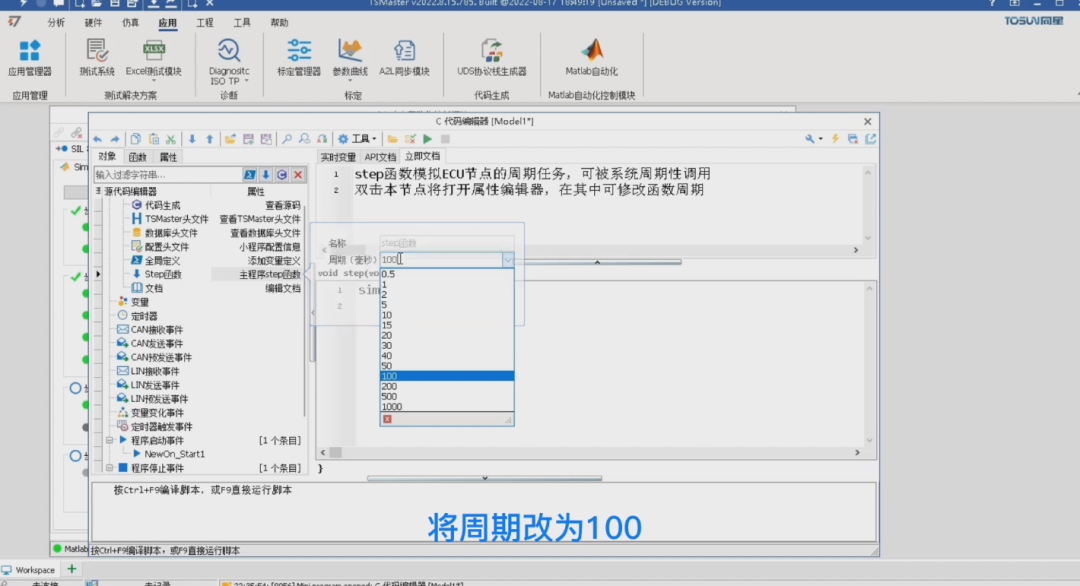
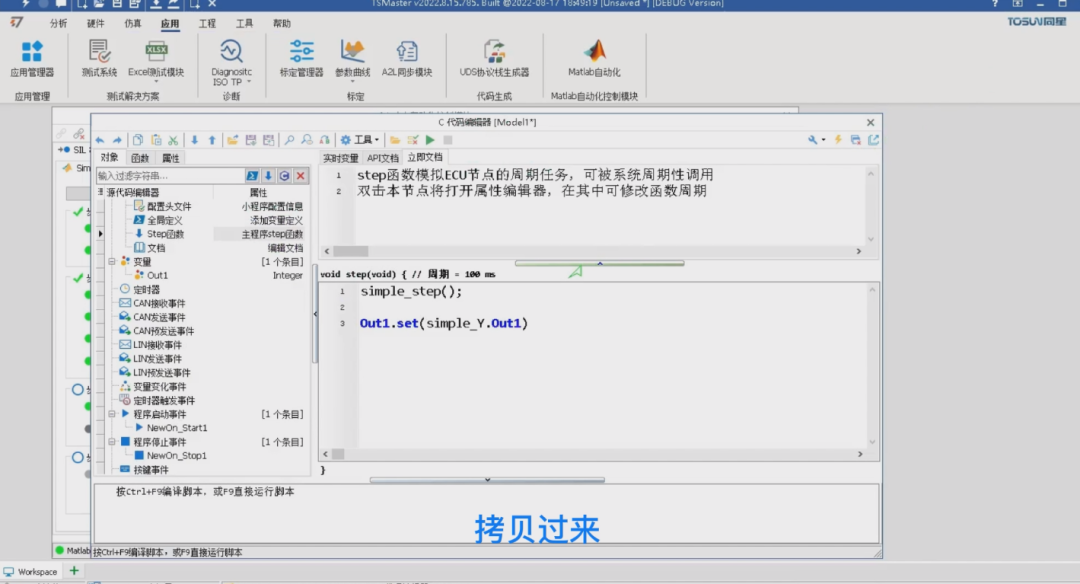
> 我们回到小程序,点击全局定义#include,"simple.h"。那么接下来就是COPY。我们双击这个simple初始化,然后到小程序的初始化事件中,粘贴然后再copy step到我们的小程序的step函数中,粘贴然后就是terminate,回到我们小程序的停止事件,同样粘贴,这样就实现了函数调用。那么需要注意的就是step函数的周期了,默认周期是5毫秒,但模型中肯定不是。我们首先还是打开这个simple.slx,然后我们到模型的属性看一下这个模型的相关的求解器的属性。它是定步长,并且步长是0.1秒,那么0.1秒在TSMaster里面就是100毫秒,双击step函数,将周期改为100,那么接下来我们需要观测一下out1这个信号。
> 我们可以直接在变量点右键,添加变量,输入我们这个out1,那么就新建了一个out1的变量,然后我们就需要在代码里找到这个变量,那么可以看到这个extern,这里写的是outports,那就是simple y这个变量,它有一个成员叫out1,就是我们需要用到的变量,我们可以在这里写下out1.set,把刚才这个out1拷贝过来,这样就实现了变量的赋值。那么小程序就算编写完毕。
执行HIL和SIL的仿真
Perform emulation of HIL and SIL /
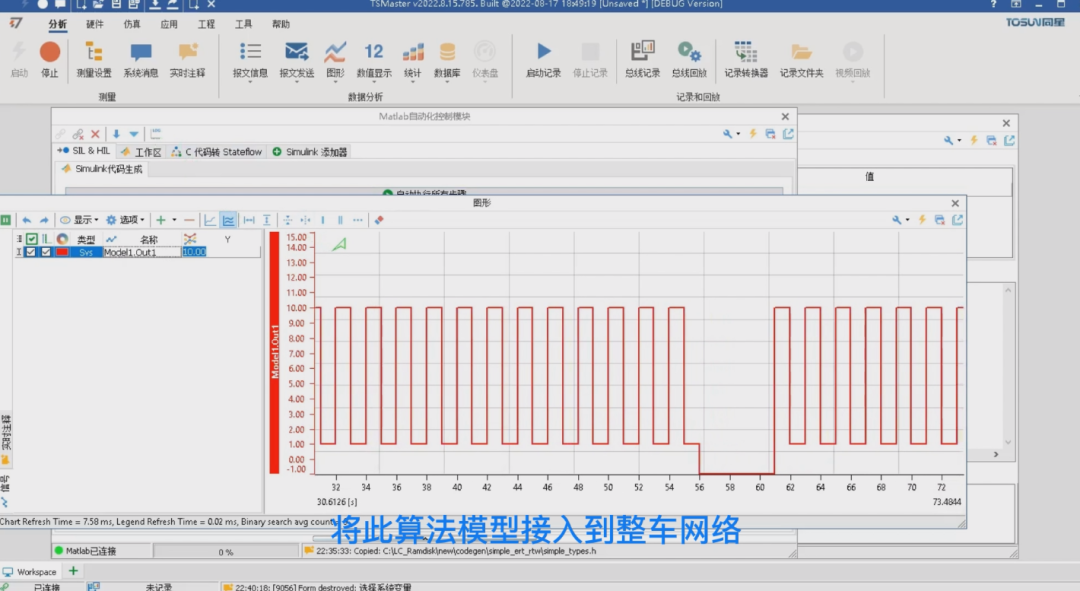
> 在此我们可以直接点击运行仿真,那么我们的算法模型其实就已经实时的在运行,这个时候如果需要观测信号,首先要启动我们的TSMaster的仿真,然后我们可以打开一个观测窗口,比如说图形,打开之后我们可以点右键添加系统变量,通过内部变量,找到model 1的out 1这个变量,然后我们可以修改他的范围,比如说改成1—15 -1—15,那么就可以看到这个图形的显示跟我们刚才看到的Simulink示波器画面是完全一样的。
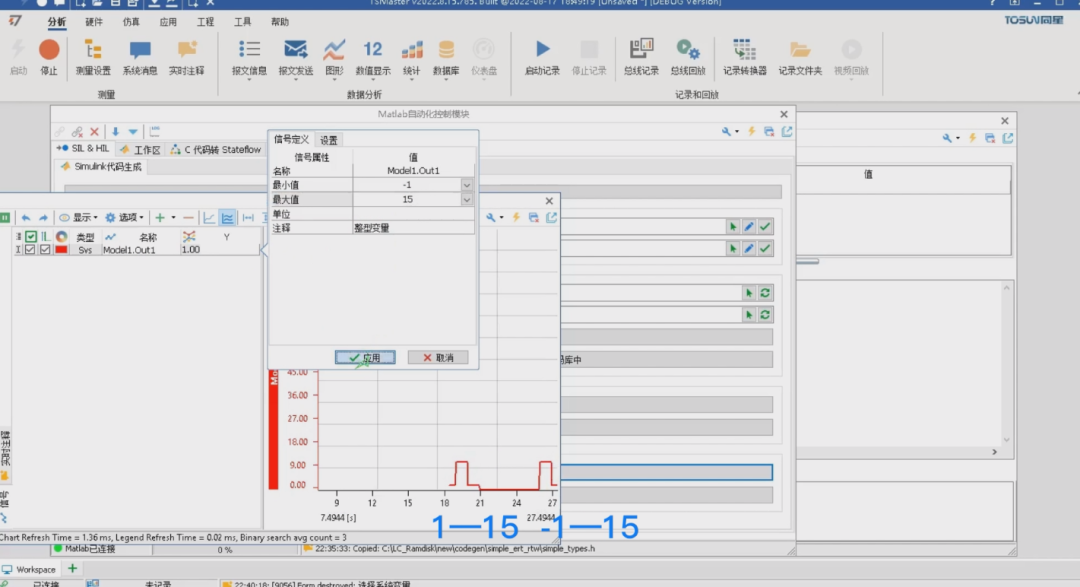
> 这个信号是可以设成竖线显示,这样就更符合这个信号代表的逻辑含义,那么这个out1的信号是实时刷新的,这就意味着我们可以通过总线接口将此算法模型接入到整车网络,可以与实际的控制器进行互动,那么以上就是matlab控制模块进行HIL的简单的方法。
以上就是我们本期介绍的TSMaster新功能之MATLAB自动化控制模块,我们下期再见!(具体操作解说可以观看我们B站视频哦)
- 相关推荐
- 热点推荐
- 自动化
-
招聘自动化、电气自动化、自动化控制工程师2015-10-24 5132
-
工业自动化控制的发展前景将会是如何2019-11-19 4793
-
PLC怎么实现自动化控制功能2022-06-06 12229
-
什么是模块化自动化?2023-03-10 4576
-
新功能发布 | TSMaster诊断功能之Diagnostic TP参数配置2022-05-31 4006
-
新功能发布 | TSMaster诊断模块之系统变量的灵活应用2022-06-18 1728
-
新功能发布 | TSMaster诊断模块之自动诊断流程2022-06-27 2807
-
新功能发布 | TSMaster诊断功能的典型应用2022-07-04 2707
-
新功能发布 | TSMaster如何实现checksum和rolling counter的本地化支持2022-08-29 3299
-
新功能发布 | TSMaster新增CANoe自动化控制模块,欢迎下载体验!2022-12-05 2802
-
TSMaster最新版本上线啦!快来试试新功能吧!2023-01-12 2206
-
TSMaster小程序启动和停止的自动化控制流程2023-12-02 2612
-
TSMaster 2024年1月最新版本,新功能太实用2024-02-19 3956
-
软件更新 | 你期待的新功能来了!TSMaster 202502 新版本亮点抢先看!2025-03-07 1873
-
干货分享 | TSMaster MBD模块全解析:从模型搭建到自动化测试的完整实践2025-08-22 3055
全部0条评论

快来发表一下你的评论吧 !
