

博文 | 使用 NXP RT1170 的 QDC 外设与增量编码器测量电机转速
描述
1.概述
2.正交编码器信号与测速方法介绍
3.RT1170 QDC 解码器用于测速的寄存器介绍
4.软件中的测速处理流程
5.测速处理代码
6.测试方法
7.测试结果
8.参考资料
1. 概述
在电机控制中,大部分都有速度环控制,电机转子速度的获取可以从绝对值编码器直接读取、测量霍尔编码器每隔 60 °的脉冲信号时间进行计算、测量增量编码器多个脉冲(M 法)或单个脉冲之间(T 法)的时间来计算, 本文主要讲述如何使用 NXP RT1170 的增强型 QDC 外设和增量编码器测量电机转子速度的方法。
2. 正交编码器信号与测速方法介绍
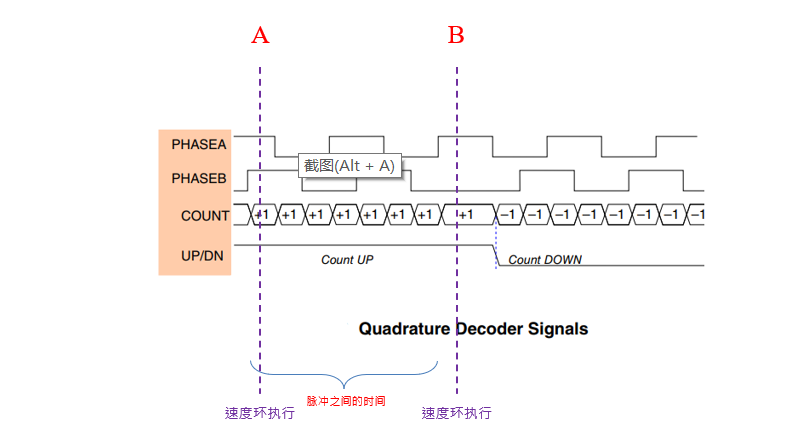
正交编码器输出 A、B、Z 信号,3 个信号都为方波信号,当电机正向旋转时,A 信号超前 B 信号 90 度,反转时 B 信号超前 A 信号 90度,Z 信号为归零信号,转子转一圈产生一瞬间的脉冲信号,主要用于圈数计数或 A、B 信号的脉冲数归零,下图为编码器 A、B 信号示意图,图片来自 RT1170 参考手册。
速度的测量的可以通过读取编码器的脉冲计数(两次速度环控制周期之间的脉冲数)计算出间隔角度,RT1170 的 QDC 自动捕获两次速度环之间脉冲数的定时器计数,从而知道时间:T = 定时器计数 * (1/定时器频率)。
当两次速度环之间有多个脉冲时,相当于 M 法测速;当电机速度很快,中间只有一个脉冲计数时,相当于 T 法。
3. RT1170 QDC 解码器用于测速的寄存器介绍
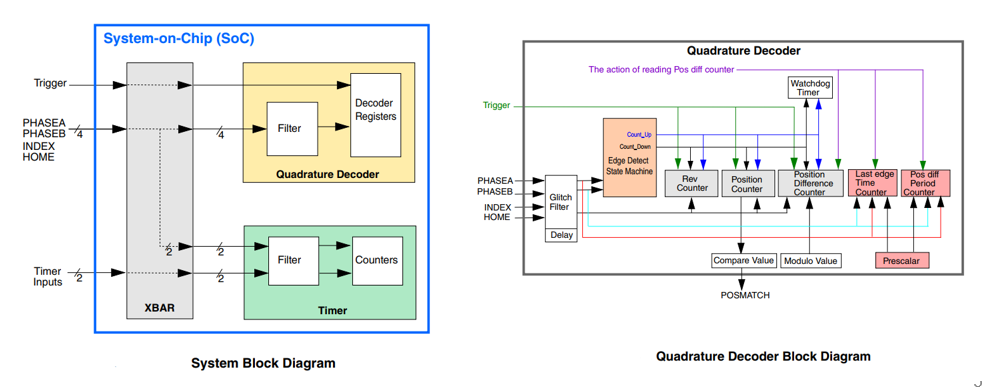
RT1170 的 QDC 外设检测 A、B 信号边沿(可开启滤波和反向),判断相位关系,对位置寄存器 UPOS、LPOS 进行加或者减操作,当反向时,寄存器 CTRL2 的 DIR 位给出方向信息。
在速度环中每次读取 POSD 寄存器时,QDC 自动将保存两次速度环之间的脉冲差值的 POSD 保存到 POSDH,同时清零 POSD,同时将这些脉冲之间所经过脉冲计数由 POSDPER 保存到 POSDPERH 供软件读取。
LASTEDGE( Last Edge Time Hold Register )对两次脉冲数之间进行计数,主要用于 T 法测速和 0 速检测(当 LASTEDGE 计满溢出时判断为速度为 0 速,因为长时间没有脉冲边沿产生)。
下图为 QDC 外设信号流程和寄存器框图。
4. 软件中的测速处理流程
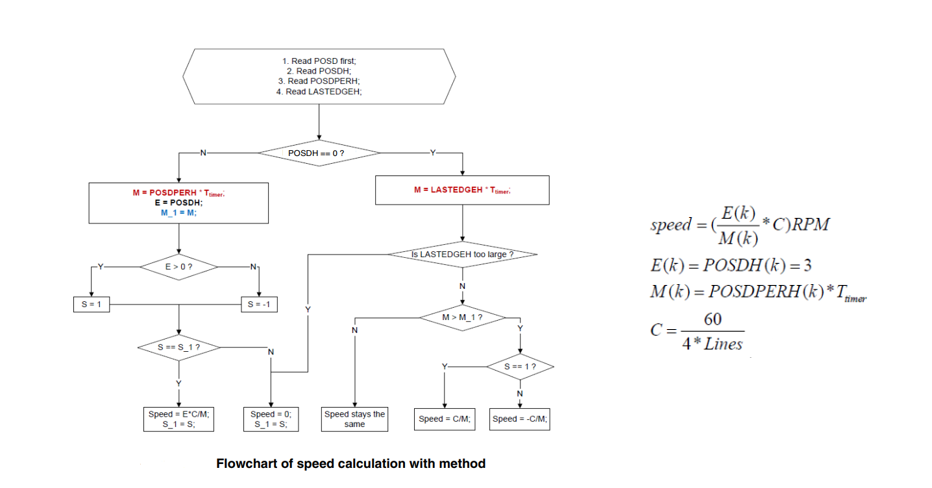
如图所示,当两次速度环之间有脉冲数时,即 POSDH 不为 0 时,使用脉冲数除以时间的方式进行速度计算,按下图左方处理,如果两次速度环之间有方向变化判定为 0 速(刚好反向的情况)。
如果两次速度环周期之间没有脉冲,则使用 LASTEDGEH 来进行速度估算,因为电机速度太低,长时间没有脉冲产生,如果电机是匀速的,估算的速度就比较准确的,根据方向使用 Speed = C/M 计算,当 LASTEDGEH 太大时,判定电机停止为 0 速。
5. 测速处理代码
QDC 测速代码,其处理和上图中的处理流程一致,软件只需要较少的操作即可计算出速度。代码如下所示:
其他初始化代码详见工程文件。
bool_t MCDRV_EncSpeedCalUpdate(enc_block_t *this){ int64_t i64Numerator; s_statusPass = FALSE; // Read POSDH, POSDPERH and LASTEDGEH this->ui16Dummy = this->pENC_base->POSD; this->sSpeed.i16POSDH = this->pENC_base->POSDH; this->sSpeed.ui16POSDPERH = this->pENC_base->POSDPERH; this->sSpeed.ui16LASTEDGEH = this->pENC_base->LASTEDGEH; // POSDH == 0 if(this->sSpeed.i16POSDH != 0) { // Shaft is moving during speed measurement interval this->sSpeed.i16PosDiff = this->sSpeed.i16POSDH; this->sSpeed.ui16Period = this->sSpeed.ui16POSDPERH; this->sSpeed.ui16Period_1 = this->sSpeed.ui16Period; if(this->sSpeed.i16PosDiff > 0) { this->sSpeed.i8SpeedSign = 1; } else { this->sSpeed.i8SpeedSign = -1; } if(this->sSpeed.i8SpeedSign == this->sSpeed.i8SpeedSign_1)
{// Calculate speedi64Numerator = ((int64_t)(this->sSpeed.i16PosDiff) * this->sSpeed.f32SpeedCalConst); // Q16.0 * Q5.27 = Q21.27this->sSpeed.f32Speed = (i64Numerator / (uint32_t)(this->sSpeed.ui16Period))<<4; // Q5.27 -> Q1.31}else{this->sSpeed.f32Speed = 0;}this->sSpeed.i8SpeedSign_1 = this->sSpeed.i8SpeedSign;}else{// Shaft is NOT moving during speed measurement intervalthis->sSpeed.ui16Period = this->sSpeed.ui16LASTEDGEH;
if((uint32_t)(this->sSpeed.ui16Period) > 0xF000UL){// Shaft hasn't been moving for a long timethis->sSpeed.f32Speed = 0;this->sSpeed.i8SpeedSign_1 = this->sSpeed.i8SpeedSign;}else{// Speed estimation in low speed regionif(this->sSpeed.ui16Period > this->sSpeed.ui16Period_1){if(this->sSpeed.i8SpeedSign > 0){i64Numerator = ((int64_t)(1.0) * this->sSpeed.f32SpeedCalConst);this->sSpeed.f32Speed = (i64Numerator / (uint32_t)(this->sSpeed.ui16Period))<<4;}else{i64Numerator = ((int64_t)(-1.0) * this->sSpeed.f32SpeedCalConst);this->sSpeed.f32Speed = (i64Numerator / (uint32_t)(this->sSpeed.ui16Period))<<4;}}}}this->sSpeed.f16SpeedFilt = GDFLIB_FilterIIR1_F16(MLIB_Conv_F16l(this->sSpeed.f32Speed), &this->sSpeed.sENCSpeedFilter);this->sSpeed.fltSpeed = MLIB_ConvSc_FLTsf(this->sSpeed.f16SpeedFilt, this->sSpeed.fltSpeedFrac16ToAngularCoeff);
return s_statusPass;}
6.测试方法
使用其他电机拖动带增量编码器的伺服电机稳定转至 1500 RPM,使用激光测速仪进行测速,伺服电机的增量编码器信号是差分信号,经过功率板将差分信号转换到单端信号,最后连接到 RT1170 开发板 ENC1 对应的 GPIO 口中,如果电机增量编码器 AB 输出信号单端信号可直接连接至 RT1170 开发板。
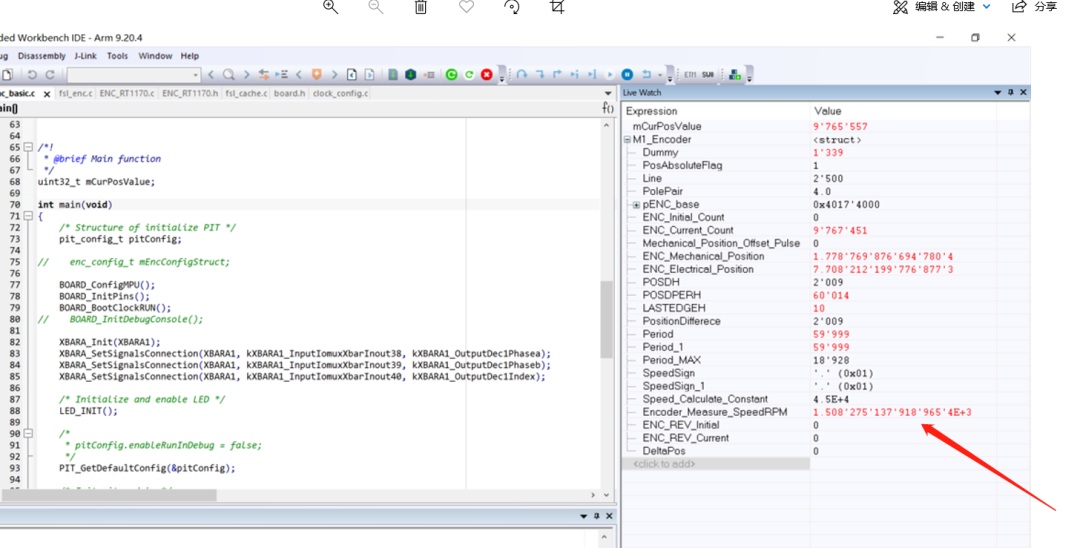
最后可以在 IAR 中通过 LiveWatch 窗口查看速度变量,检查与用激光测速器测的速度是否一致。

拖动伺服电机转至 1500RPM

信号连接实物图
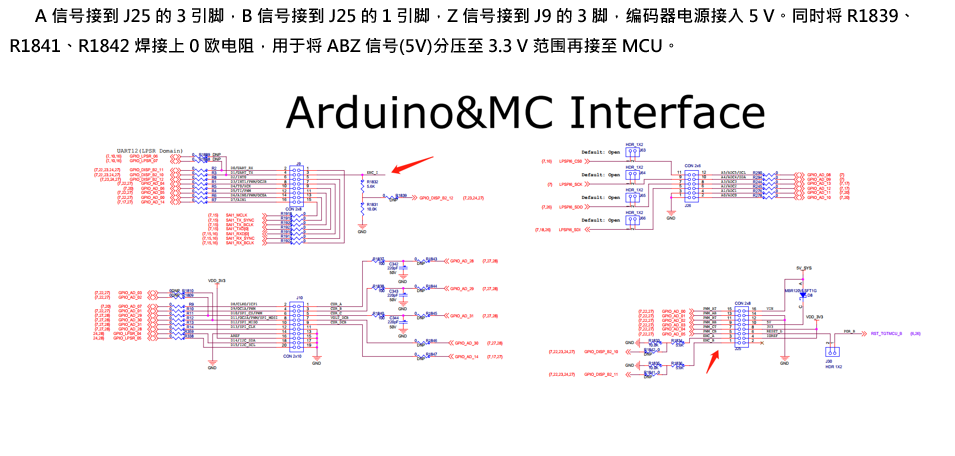
AB 信号连接原理图
7. 测试结果
IAR DEBUG 后,在 IAR 的 live Watch 窗口中查看 Encoder_Measure_SpeedRPM 变量,其值为 1500RPM 左右,说明测速还是比较准确的。
参考资料
参考手册:
IMXRT1170RM.pdf
i.MX RT1170 Processor Reference Manual
- 相关推荐
- 电机
-
使用STM32的编码器接口对接增量式编码器控制电机进行很低速的转动时,需要如何进行电机转速的测量?2024-04-30 0
-
增量式编码器控制电机转速问题2016-01-27 0
-
基于RT1170 开发板开机测评 精选资料分享2021-07-13 0
-
RT1170开发板与SDRAM相比有哪些优点?2021-07-26 0
-
rt1170系列MCU的外设工具有问题吗?2023-03-15 0
-
RT1170 LCD上的小部件变形是怎么回事?2023-03-28 0
-
RT1180内建外设是否与RT1170内建外设寄存器兼容?2023-05-06 0
-
光电编码器测量电机转速的方法有哪些?2023-05-25 0
-
恩智浦i.MX RT1170开创GHz MCU时代2021-03-22 3609
-
恩智浦i.MX RT1170在将该系列带上了更高的层面2021-05-18 3929
-
i.MX RT1170的GPIO外设的使用2022-09-01 2179
-
伺服电机编码器2023-06-26 1657
-
伺服电机编码器分类2023-08-25 3506
-
基于NXP微控制器i.MX RT1170的多人体实时检测算法和系统2023-10-26 1186
-
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(下)2023-11-09 1102
全部0条评论

快来发表一下你的评论吧 !
