

技术资讯 | 直流电机驱动电路设计
描述
直流电机驱动电路可以封装在小模块中,如图所示
顾名思义,电机驱动器用于驱动电机并控制其速度以及旋转方向。电机驱动器 IC 的核心是电流放大器,负责为电机提供所需的功率。然而,术语“电机驱动器”也可以统称为电机驱动系统,旨在控制各种电机的动作。这些系统也可以由分立元件构建,特别是在需要更高功率时。在本文中,我们将研究系统级的电机驱动电路,其中驱动器组件与电机和控制电路集成到同一个系统中。驱动部分本身通常是具有特定驱动配置的桥式电路;我们将在本文中介绍这些驱动配置。01高级直流电机驱动电路电机驱动电路和系统将多个组件集成到单个封装或组件中。完整的系统中,电机驱动器包括下图所示的一组功能块。
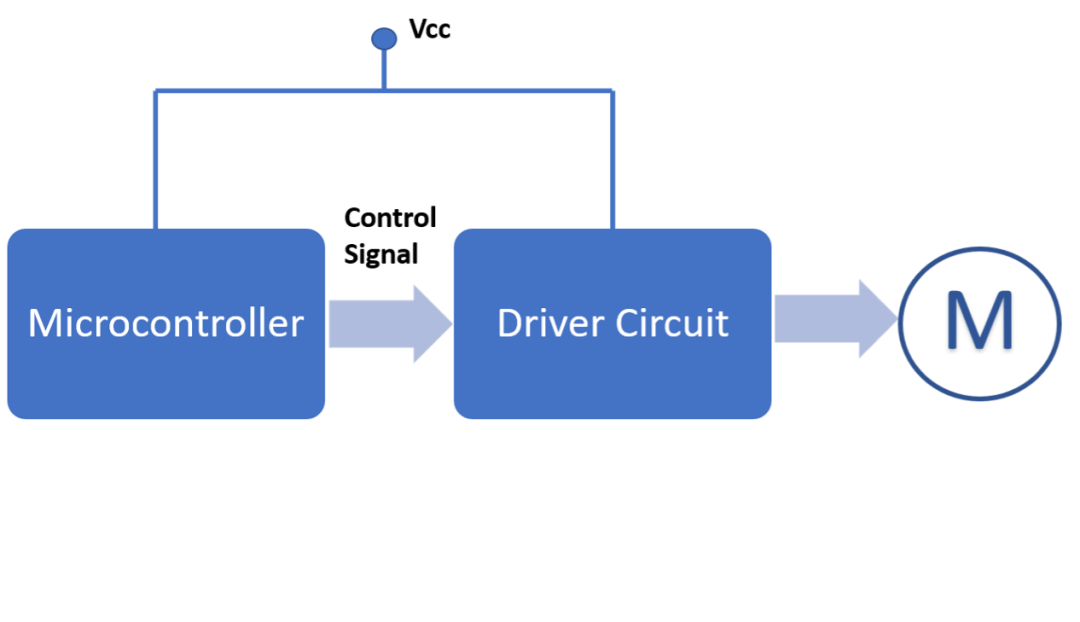
微控制器部分在驱动电路开始运行时触发,它主要处理从驱动电路接收到的数据,如关于位置或速度的反馈(例如使用电机旋转变压器)。驱动器电路包括激励驱动所需的所有电路,但如果驱动电路可以在逻辑电平上触发,则可以由微控制器直接提供激励。在具有中等功率输出的 MOSFET 电机驱动器电路中可能会出现这种情况。02H桥电机驱动拓扑最常见的直流电机驱动电路拓扑是 H 桥电路。该电路如下图所示,以它的 H 形拓扑为其命名。通过控制电路中每个 MOSFET 中驱动电流的方向,直流电机可以使用 H 桥在顺时针或逆时针方向上运行。
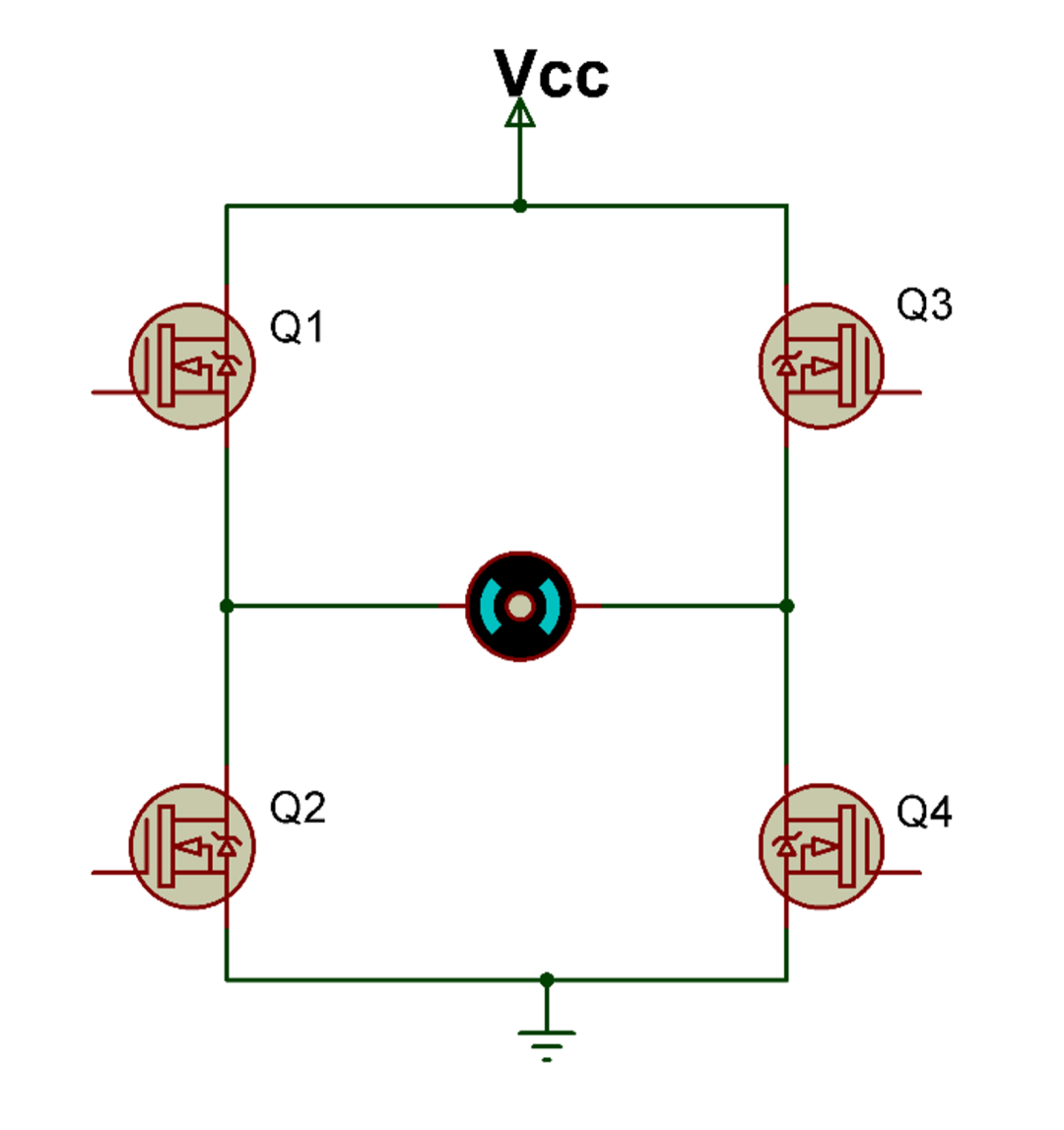
MOSFET 是用于实现 H 桥设计的最常见组件。接通 Q1 和 Q4 会使电机沿一个方向运行,而接通 Q2 和 Q3 会使电机沿相反方向运行。相同的驱动电路可以使用脉宽调制 (PWM)进行操作,这使得可以在电机运行期间动态控制电机的速度。03带控制器的替代电机驱动器H 桥驱动电路由将 PWM 或类似数字控制输入连接到 MOSFET 栅极的电子元件电路组成。它有两个主要功能:
通过将输入电压转换为适当的电平来驱动栅极。
提供足够量的电流以快速对栅极进行充电和放电。
此外,一些驱动电路还具有其他特点,例如:
驱动模式决定了如何将输入命令转换为驱动门的信号。
包含额外的安全功能,例如过流保护。
调节 FET 开启和关闭的时间长度。
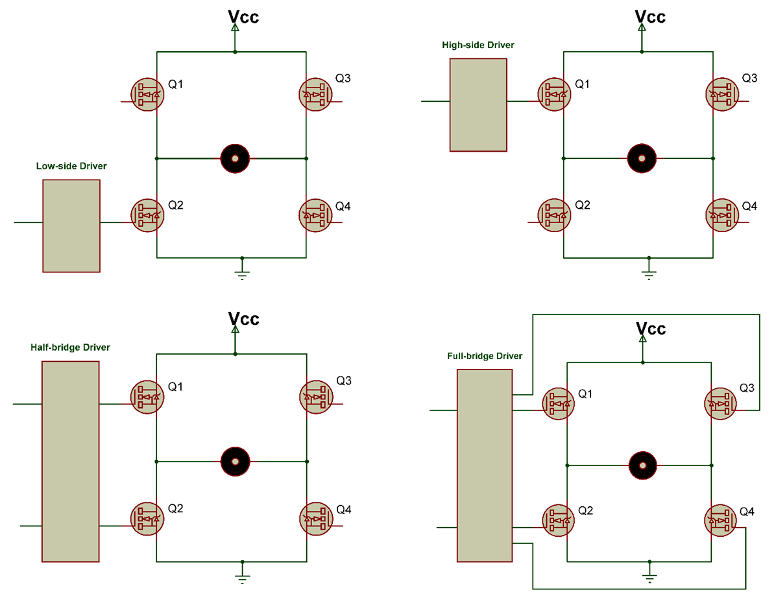
下表和图片总结了常见的驱动器控制器电路。此时值得一提的是,低边使用的所有 MOSFET 都是 N 型的,但 P型和 N型MOSFET都可以用于高边。
| 低边驱动器 | 这些专门用于驱动上述 H 桥中的 Q2 或 Q4 |
| 高边驱动器 | 这些专门用于驱动上述 H 桥中的 Q1 或 Q3 |
| 半桥驱动器 | 由一个低边和高边驱动器组成,它们串联运行以控制 Q1 和 Q2(或 Q3 和 Q4)。 |
| 全桥驱动器 | 由两个高边和低边驱动器组成,可以共同驱动所有四个 MOSFET |
04H桥电机驱动器设计中的挑战虽然设计基于 H 桥的电机驱动器的过程乍一看似乎很容易,但并非没有困难,特别是在电路设计阶段或固件开发阶段。在 H 桥电路中,FET 以对角线模式打开和关闭,但这种切换不能在所有 FET 之间同时发生。
终止时间:总会有一个时间点,所有晶体管都会打开。如果顶部和底部开关都打开,则会出现电压和功率的瞬间损失,或者可能发生短路。可以使用终止时间来防止这种情况发生。这是 H 桥中所有 FET 开启的短暂时间。终止时间允许程序员延迟打开最顶部的开关,直到最底部的开关关闭。
PWM 频率:设计电机驱动器时必须正确设置的另一个关键要素是 PWM 频率。在较低频率下会损失更多功率。但是,如果 PWM 频率太高,微控制器可能难以在所需的偏置下提供必要的 PWM 信号。此外,栅极驱动器和晶体管开关可能由于与高频率开关不兼容而失效。所以必须在固件中设置正确的 PWM 频率,以保证电机控制器的正常运行。
EMI:最后,极端EMI也是某些类型的电机可能出现的问题,例如有刷直流电机。这是由换向器的频繁切换引起的,这会将噪声注入附近的组件。在极端情况下,传导电流会损坏附近的组件。滤波器和铁氧体通常用于屏蔽可能吸收这种 EMI 的电缆,尤其是在大部分功率集中的较低频率下。
05H桥电机驱动电路的MOSFET选择如果要在电机驱动电路中使用 MOSFET,它们应该具有一些重要的参数:
高电压和电流处理能力
低导通电阻
尽可能低的引线电感
引线电感和 PCB 布局对于确定驱动路径上的总电感都很重要。在启动期间,过大的电感会导致驱动电路中的欠阻尼振荡,从而损坏或毁坏 MOSFET。因此,MOSFET 需要做瞬态电压保护。这可以像一个TVS 二极管和一个与栅极串联的小电阻一样简单,并且应该在电机两端放置一个快速恢复二极管。
总结
当您准备好设计和仿真直流电机驱动电路时,请确保使用Cadence的PSpice中业界最佳的电路设计和仿真工具。PSpice 用户可以访问强大的 SPICE 模拟器以及专业设计功能,如模型创建、图形和分析工具等等。如果您想了解更多产品信息,请关注我们,欢迎您的留言。
- 相关推荐
- 热点推荐
- 电路设计
-
有刷直流电机的驱动电路 总结2023-02-23 5442
-
直流电机驱动控制电路设计2022-06-21 3093
-
直流电机驱动电路设计2021-10-08 1741
-
直流电机驱动设计2021-09-28 2983
-
直流电机驱动电路设计介绍2021-01-26 4288
-
直流电机驱动电路设计解析2021-01-21 1846
-
正反转直流电机驱动电路2020-01-11 12333
-
直流电机正反转驱动电路2017-01-14 4213
-
直流电机驱动电路图2016-11-05 1769
-
直流电机几种驱动电路设计思路2016-08-04 110620
-
双向调速直流电机驱动电路设计方案2009-12-24 2341
-
PWM直流电机驱动电路及程序2008-09-23 9320
-
直流电机驱动电路2008-09-22 2991
全部0条评论

快来发表一下你的评论吧 !
