

ÔÇťšáüÚżÖÔÇŁń╗╗ŠÇžÔÇťŠŐŤň╝âÔÇŁňĄÜń╝áŠäčňÖĘŔ׏ňÉł´╝îŠÖ║ŔâŻÚężÚęÂŔ┐śŠś»ň«ëňůĘŔç│ńŞŐňÉŚ´╝č
ŠĆĆŔ┐░
ÔÇť
7 Šťł 14 ŠŚą´╝îšë╣Šľ»Šőëń║║ňĚąŠÖ║ŔâŻŔ┤čŔ┤úń║║ Andrej Karpathy ň«úňŞâšŽ╗ŔüîŃÇé
10Šťł4ŠŚą´╝îšë╣Šľ»ŠőëňĆĹňŞâňů│ń║ÄŠľ░ŔŻŽšíČń╗ÂÚůŹšŻ«šÜ䊍┤Šľ░Ŕ»┤ŠśÄ´╝ÜšöĘš║»ŔžćŔžëňĆľń╗úÚŤĚŔżżŃÇé
ÔÇŁ
Ŕ┐ĹŠŚą´╝îÚęČŠľ»ňůőŔ┤╣ň┐âňĄÜň╣┤š╝ľš╗çšÜäÔÇťšżÄŠóŽÔÇŁňťĘňĄ▒ňÄ╗ŠáŞň┐âÚÇáŠóŽń║║ń╣őÚÖůŔÉŻňť░´╝îš║»ŔžćŔžëňĆľń╗úÚŤĚŔżżŔ┐ÖńŞÇńŞżňŐĘńŻ┐šë╣Šľ»Šőëň揊Č튳ÉńŞ║Š▒ŻŔŻŽŔíîńŞÜšäŽšé╣ŃÇé
 
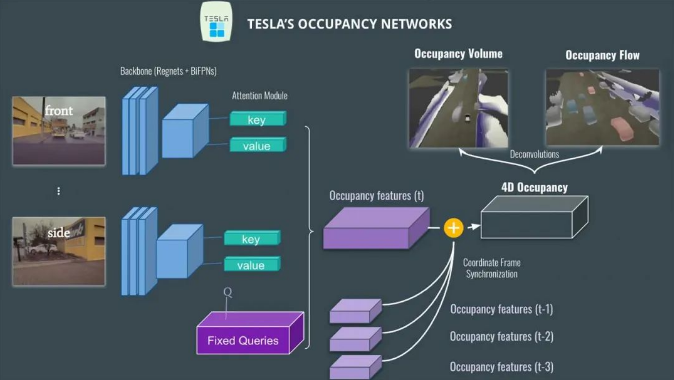
ńŞÜňćůń║║ňúźňŹ┤ňĄžňĄÜň»╣ŠşĄŠľ╣ŠíłŠîüń┐ŁšĽÖŠÇüň║ŽŃÇéń╗ÄšÉćŔ«║ńŞŐŠŁąŔ»┤´╝îńżŁÚŁáŠĹäňâĆňĄ┤šÜäš║»ŔžćŔžëŠäčščąŠľ╣ŠíłŠś»ń╗ąń║îš╗┤ňŤżňŻóŔ┐ŤŔíîňĆŹňĄŹšÜäŠÄĘŠ╝öňĺîŔ┐Éš«Ś´╝îńŻćńŞÄň«×ÚÖůÚężÚęšÜäńŞëš╗┤ńŞľšĽîň╣ÂÚŁ×ň«îňůʚȎňÉł´╝îŠ│óÚĽ┐ŔîâňŤ┤ŃÇüŔžćŔžëňÖ¬šé╣ŃÇüŔžćŔžëšŤ▓ňî║šşëňüĆňĚ«Ŕ░üŠŁąń╣░ňŹĽ´╝č
ń╗ąńŞőŠś»šë╣Šľ»ŠőëŔŻŽńŞ╗ń╗ČŔç¬ŔíîńŞŐń╝ᚯŚ╗ťšÜäÚężÚęÂŔžćÚóĹŠł¬ňŤż´╝îňĆ»ń╗ąšťőňł░ŠőąŠťëFSDšÜäŔŻŽŔżćŔç¬ňŐĘŠĺ×ńŞŐŠŐĄŠč▒ňşÉŃÇüňĚ«šé╣Šĺ×ňł░Ŕíîń║║ŃÇüŔ┐ťŔĚŁšŽ╗ňüťŔŻŽšşëÚŚ«Ú󜚬üŠśżŃÇé

Ôľ▓Šĺ×ńŞŐŠŐĄŠč▒ňşÉ
Ôľ▓ňĚ«šé╣Šĺ×ňł░Ŕíîń║║´╝łň╣ŞňżŚÚężÚęÂňĹśÚś╗Šşó´╝ë
Ôľ▓Ŕ┐ťŔĚŁšŽ╗ňüťŔŻŽ
Ŕ┐Öń║Ťň«ëňůĘÚÜÉŠéú´╝îŠü░Šü░Šś»ŔĚŁšŽ╗ŠäčščąšÜäš╝║ňĄ▒´╝îňĆľŠÂłňĄÜń╝áŠäčňÖĘŔ׏ňÉł´╝îÚÇëŠőęš║»ŔžćŔžëŠäčščąŠľ╣ŠíłšÜäńŞżňŐĘńŞŹšŽüŔ«ęń║║šľĹŠâĹ´╝Ü
i.ÚÖŹńŻÄŠłÉŠťČ´╝č
 
ii.š«ŚňŐŤňćŚńŻÖ´╝č
 
iii.ÔÇťšáüÚżÖÔÇŁń╗╗ŠÇž´╝č
ŠŐÇŠť»ńŞÄŠłÉŠťČ´╝îŠ░ŞŔ┐ťňťĘŠŁâŔíí´╝îŠ▒ŻŔŻŽńŻťńŞ║ń║ĄÚÇÜňĚąňůĚň║öń╗ąň«ëňůĘŔç│ńŞŐ´╝îÔÇťÚŤĚŔżż+ŠĹäňâĆňĄ┤ÔÇŁšşëňĄÜń╝áŠäčňÖĘŔ׏ňÉłń╗ŹŠś»ńŞ╗ŠÁüŠľ╣Šíł´╝îňąąŔ┐¬ňĘüńŻťńŞ║ŔŻŽŔŻŻŔÂůňú░Š│óń╝áŠäčňÖĘńŞ╗ŠÁüńżŤň║öňĽć´╝îň░ćŠîüš╗şŠŐĽňůąAK2Ŕ┐şń╗úšáöňĆĹ´╝îńŞ║ŠÖ║ŔâŻÚężÚęÂňĆĹň▒ĽŠĆÉńżŤŠťëňŐŤń┐ŁÚÜťŃÇé
 
 
- šŤŞňů│ŠÄĘŔŹÉ
- šâşšé╣ŠÄĘŔŹÉ
- ń
-
Šť¬ŠŁąňĚ▓ŠŁą´╝îňĄÜń╝áŠäčňÖĘŔ׏ňÉłŠäčščąŠś»Ŕç¬ňŐĘÚężÚęšá┤ň▒ÇšÜäňů│Úö«2024-04-11 2402
-
ňĄÜń╝áŠäčňÖĘń┐íŠü»Ŕ׏ňÉłŠŐÇŠť»2012-08-15 4581
-
MEMSń╝áŠäčňÖĘ´╝îň╝ĽÚóćňůĘŠľ░ŠÖ║ŔâŻŔŻŽň«ëňůĘ2014-08-08 3473
-
ňč║ń║ÄňĄÜń╝áŠäčňÖĘŠĽ░ŠŹ«Ŕ׏ňÉłšÜäŠÖ║Ŕ⯊ť║ňÖĘń║║Ŕ«żŔ«í2018-11-01 2440
-
ňĄÜń╝áŠäčňÖĘń┐íŠü»Ŕ׏ňÉłŠŐÇŠť»ŔžúŠ×É2018-11-07 2418
-
ŠÖ║Ŕ⯊äčščąŠľ╣ŠíłŠÇÄń╣łňŞ«ňŐęň«×šÄ░ň«ëňůĘšÜäŔç¬ňŐĘÚężÚę´╝č2019-07-31 3294
-
ń╝áŠäčňÖĘŔ׏ňÉłŠľ╣ŠíłŠö╣Ŕ┐ŤŠÖ║ŔâŻŔŻŽŔżćšÜäň«ÜńŻŹš│╗š╗č2020-07-30 2224
-
Š▒ŻŔŻŽń╝áŠäčňÖĘŔ׏ňÉłš│╗š╗čŠÁůŠ×É2020-07-31 3166
-
ňĄÜń╝áŠäčňÖĘń┐íŠü»Ŕ׏ňÉłńŻ┐šöĘšÜäňĄäšÉćňÖĘŠś»ňŹĽšë犝║Ŕ┐śŠś»šöÁŔäĹ´╝č2020-08-26 2366
-
ňĄÜń╝áŠäčňÖĘŠĽ░ŠŹ«Ŕ׏ňÉłš│╗š╗č2009-07-06 577
-
ňč║ń║ÄňĄÜń╝áŠäčňÖĘń┐íŠü»Ŕ׏ňÉłšÜäňŹ▒ÚÖęÚężÚęÂŔíîńŞ║ŠúÇŠÁőš│╗š╗č2017-09-25 858
-
ŠÖ║ŔâŻŔŻŽŔżćń╝áŠäčňÖĘŔ׏ňÉłŠľ╣ŠíłšáöŔ«ĘňłćŠ×É2018-01-18 7967
-
ňĄÜń╝áŠäčňÖĘŠĽ░ŠŹ«Ŕ׏ňÉłšÜäŔç¬ňŐĘÚężÚęŠ▒ŻŔŻŽ2019-05-15 4835
-
ŠÖ║ŔâŻÚężÚęÂňĺîňĄÜń╝áŠäčňÖĘš│╗š╗čŔ»żń╗ÂńŞőŔŻŻ2021-03-25 1417
-
ňĄÜń╝áŠäčňÖĘŔ׏ňÉłňťĘŔç¬ňŐĘÚężÚęÂńŞşšÜäň║öšöĘŔÂőňŐ┐ŠÄóšęÂ2024-12-05 2598
ňůĘÚâĘ0ŠŁíŔ»äŔ«║

ň┐źŠŁąňĆĹŔíĘńŞÇńŞőńŻášÜäŔ»äŔ«║ňÉž !
