

「应用笔记」激光二维码导航混合制图
描述
一、激光导航制图
1、右击机器人应用软件中的地图字样,选择制作激光地图,将制图模式修改为“制作有反/无反地图”
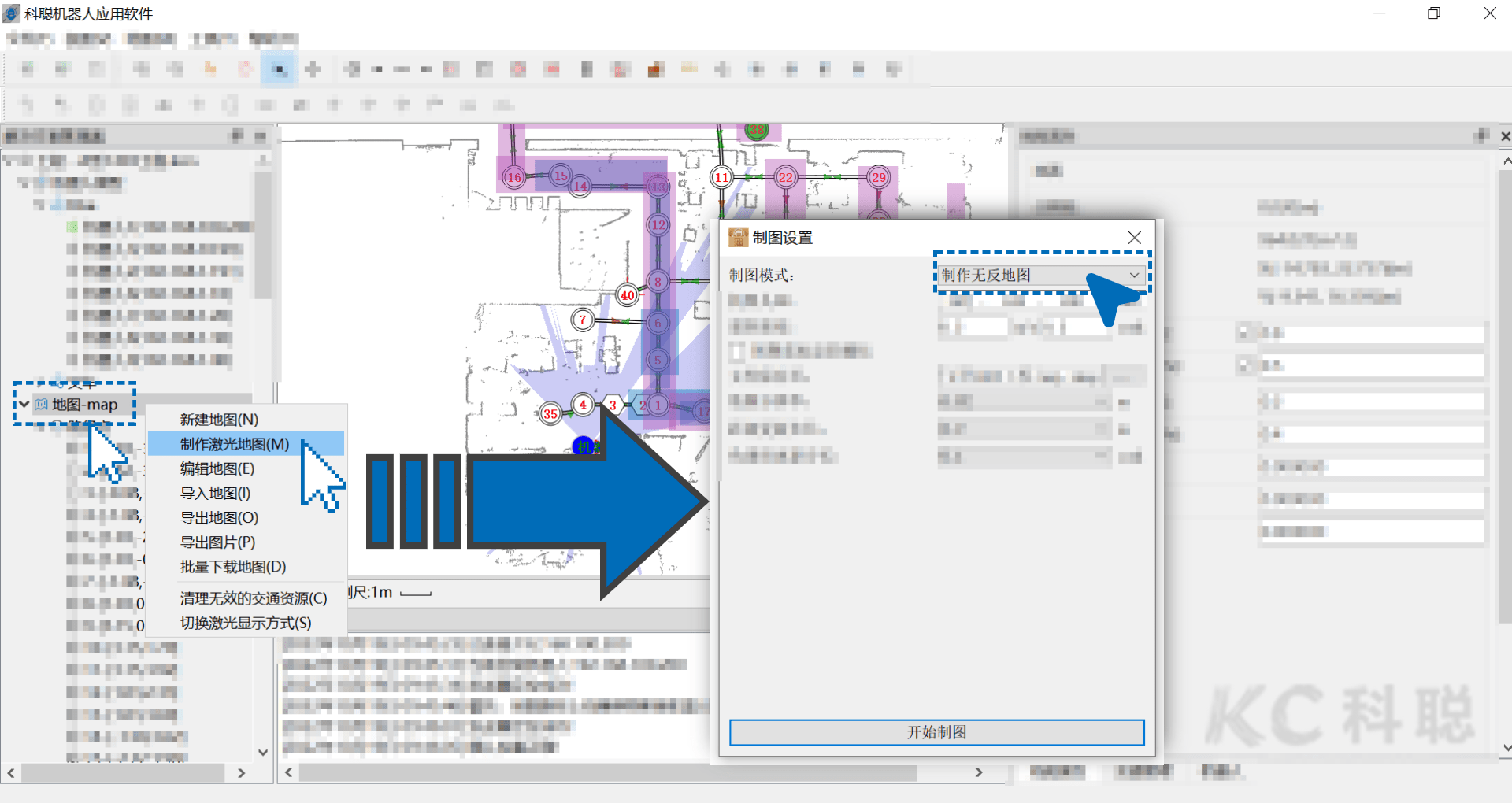
2、开始制图:点击开始制图,通过快捷键控制车辆运行。

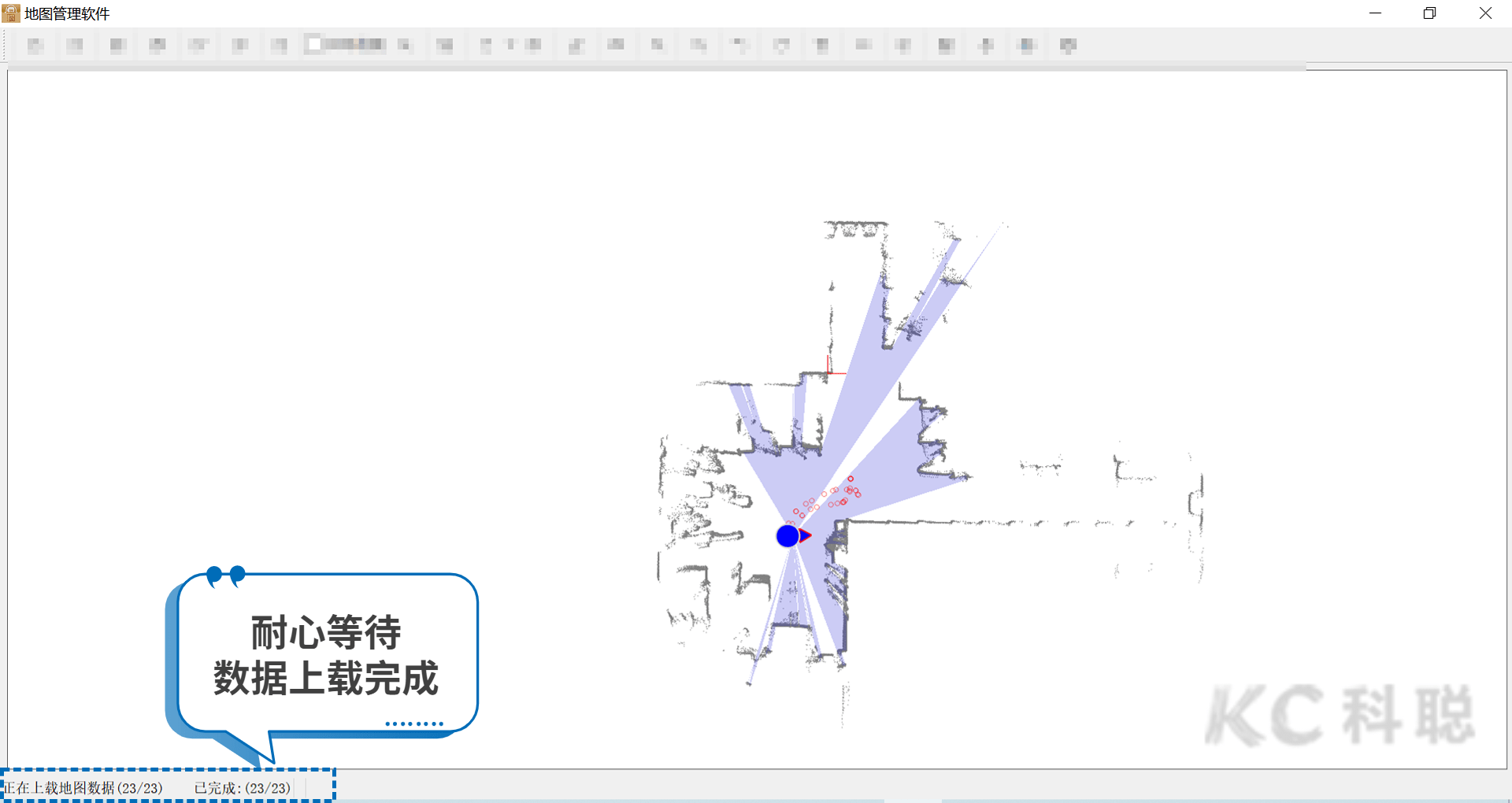
3、 遥控机器人在现场运行路径周围进行扫描,完成后静止等待左下角数据处理。
二、二维码添加
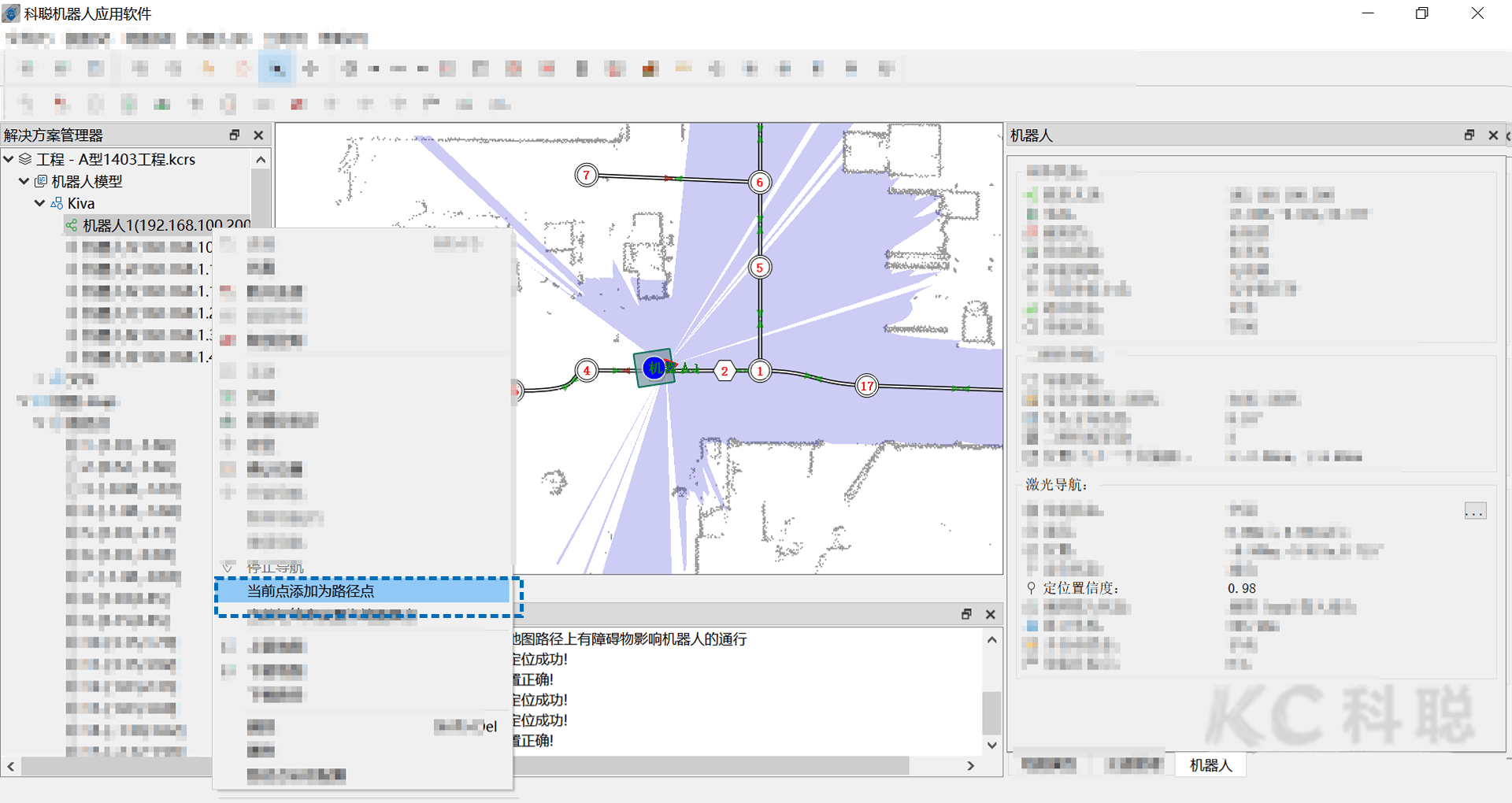
1、检查可见的激光数据与墙体之间的贴合程度,应保证每一束激光数据尽头都有对应障碍物轮廓以及检查定位置信度应保证在 0.9 级以上。
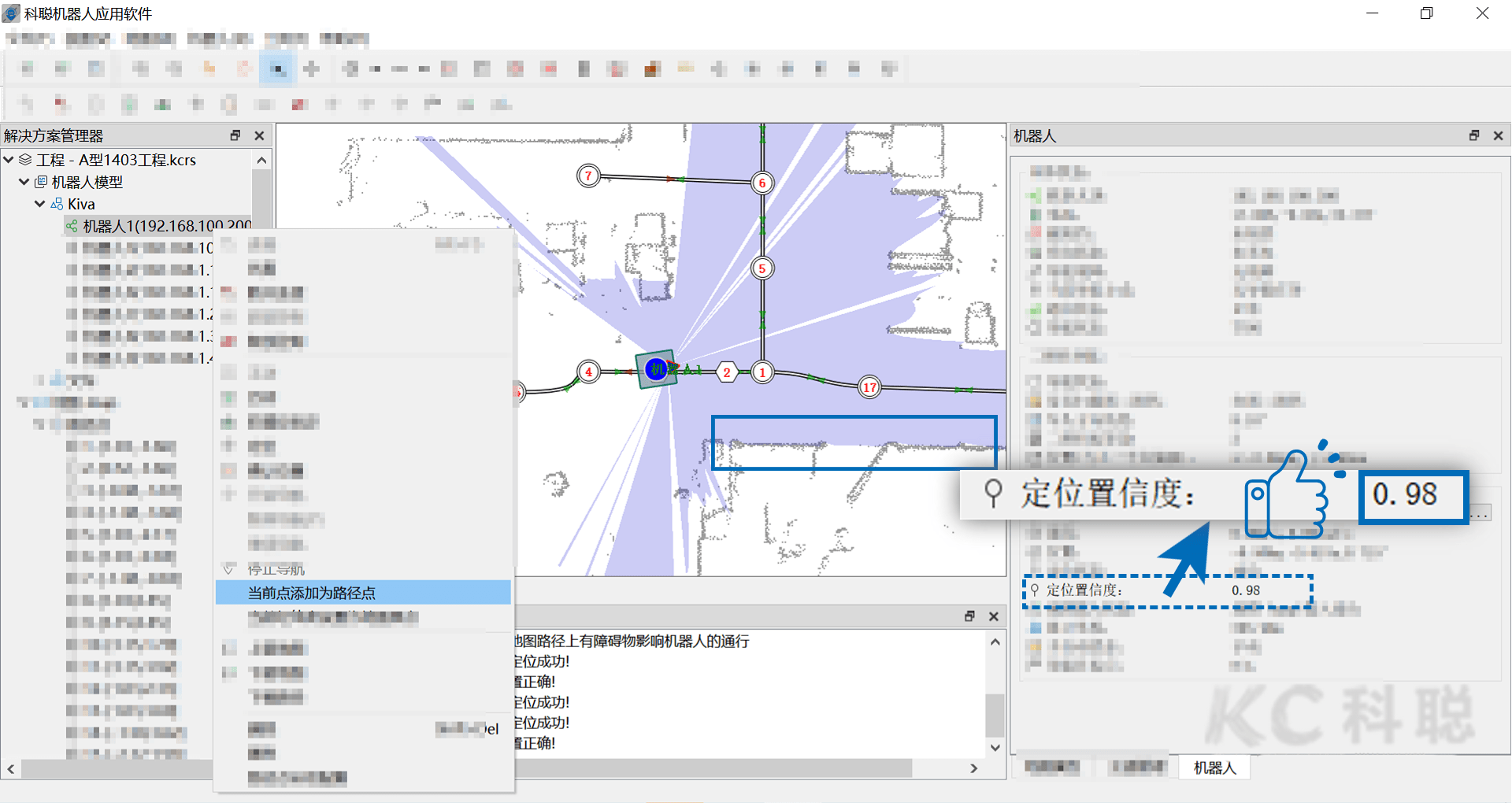
2、用户手动或自动将 AGV 运行至二维码传感器可稳定扫描到布置好的贴纸后,右击获取控制的机器人 IP,选择“当前点添加为路径点”,系统可自动根据当前定位与检测到的二维码偏差,将二维码路径点匹配至激光地图中。按此方法将二维码依次新增至地图。
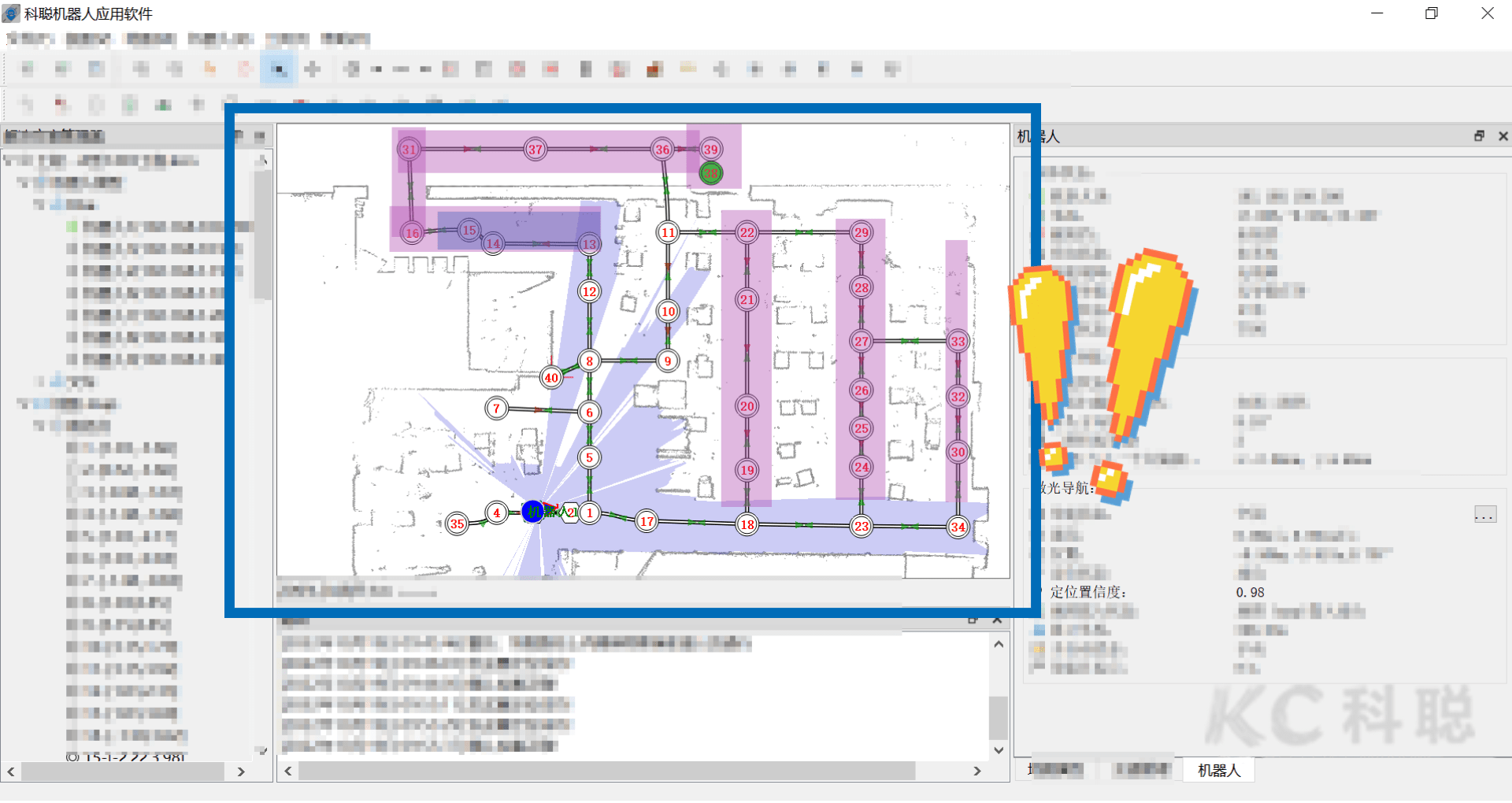
三、完成制图
应用笔记专栏将持续更新 请大家敬请关注
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于STM32的二维码识别源码+二维码解码库lib2025-05-28 522
-
二维码识别2015-08-27 25680
-
二维码软件中制作Dot Code二维码的步骤2020-12-02 3394
-
关于AGV控制系统使用中的应用笔记(一)2022-10-24 2801
-
二维码在医疗行业中的应用2010-10-13 1554
-
固定二维码与变动二维码防伪标签的作用2017-05-08 1504
-
访客的二维码门禁是否足够安全2020-06-05 1448
-
二维码在智能门禁中的应用,二维码门禁如何保证安全性2020-07-19 5131
-
工业二维码是什么,如何使用工业二维码2021-06-24 5423
-
读取二维码扫描设备有哪些类型2021-07-06 5598
-
QR二维码解码流程与使用方法2022-07-22 13062
-
二维码模组用途广泛 精准高效识别和读取条码、二维码2023-03-29 2799
-
二维码扫码读头有什么功能?如何选择二维码读头?2023-03-30 3294
-
Labview生成二维码2024-08-01 1166
-
agv叉车激光导航和二维码导航有什么区别?适用什么场景?选哪种比较好?2024-10-15 1787
全部0条评论

快来发表一下你的评论吧 !
