

直角坐标机器人&关节机器人的区别详解
描述
直角坐标机器人
直角坐标机器人是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。又称大型的直角坐标机器人,也称桁架机器人或龙门式机器人,其工作的行为方式主要是通过完成沿着X、Y、Z、(A、B、C)轴上的线性运动来进行的。
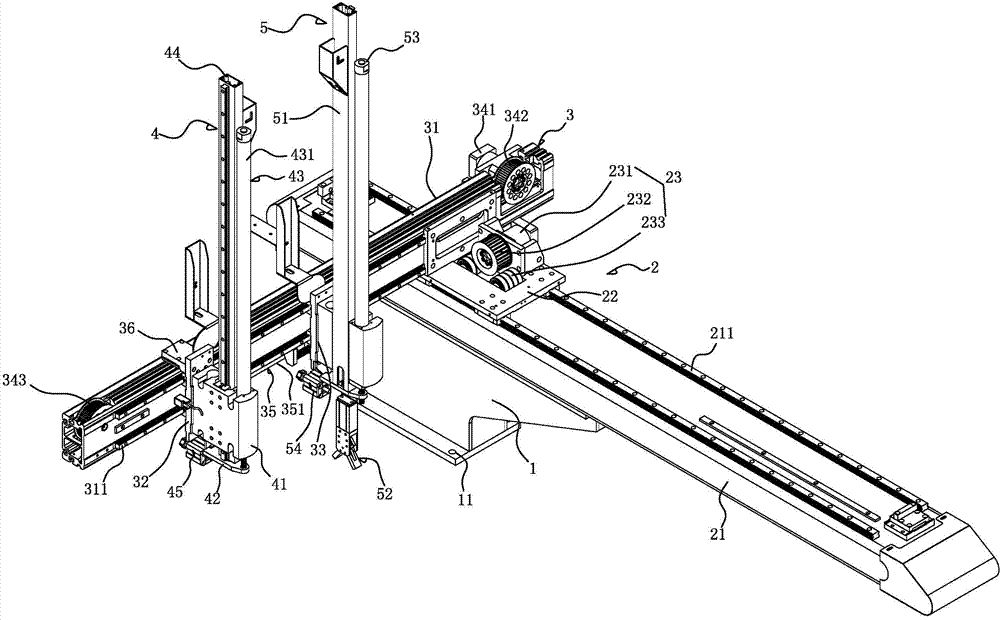

直坐标机器人控制系统
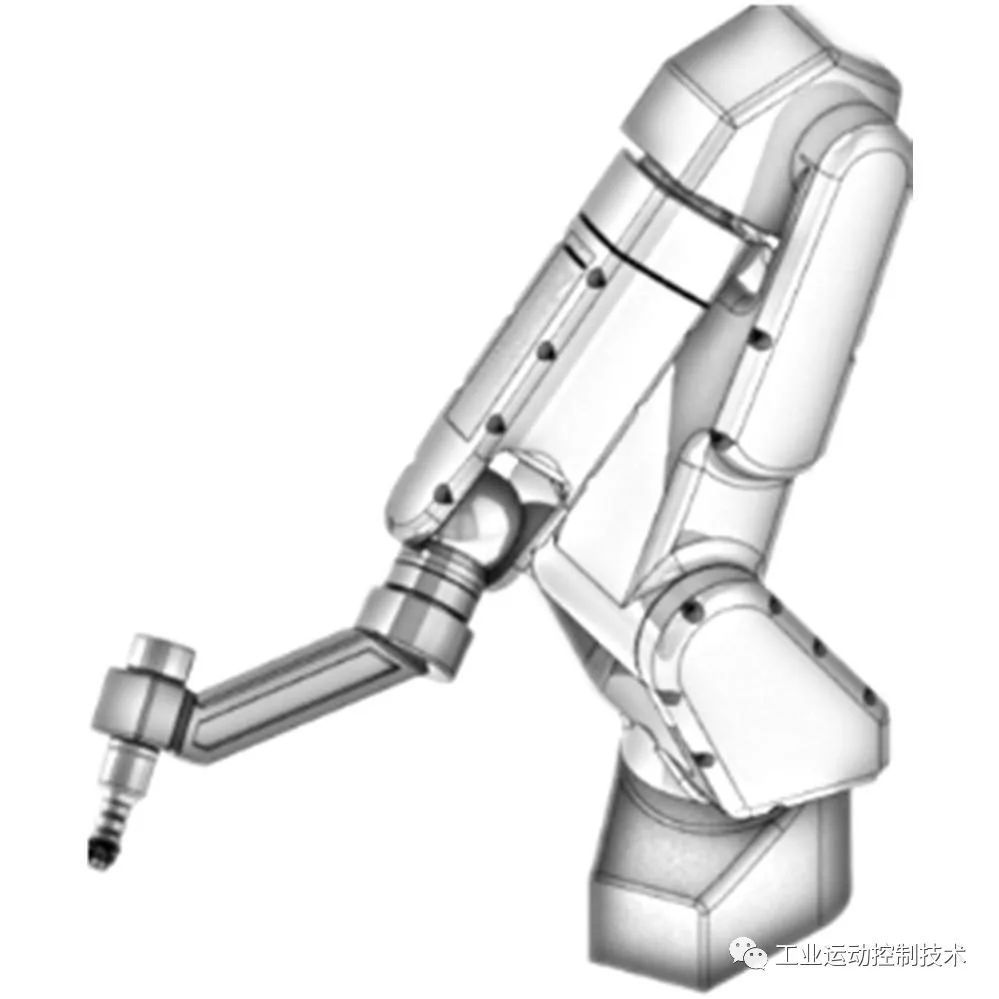
关节机器人
关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。比如,自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。
直角坐标机器人与关节机器人有哪些方面的区别?
一、工作空间与承载能力
1、直角坐标型标准单根长度6m,拼装后可达到100m;组合成龙门式机器人,其工作空间可以是非常的三维立体空间。特殊结构承载可达上吨。
2、关节型最大工作半径3m,在有效半径内可以任何角度工作。承载能力有几种规格可选,但价格及其昂贵。
二、工作精度
1、直角坐标型:由于结构简单,重复定位精度0.05mm,丝杠型可达0.01mm,甚至更高。
2、关节型:重复定位精度0.06mm,轻载荷小半径0.02mm,重载荷精度0.2mm。
三、组合方式
1、直角坐标型组合方式多样,龙门式、悬臂式、壁挂式等,可根据不同的负载、行程、功能及特殊空间要求,为客户订制所需求产品。同时,X、Y、Z三轴基础上可以扩展旋转轴和翻转轴,构成五自由度和六自由度机器人。
2、关节型可细分为6自由度机器人、Scara机器人、四连杆机器人,种类相对少,选择性和灵活性较直角坐标型小很多。
四、软件编程操控和维护
1、从电气系统到上位机直角坐标型都是开放、灵活的。编程简单,用户可以随意扩展,操控简单易操作。简单程序问题和硬件故障,客户可以自行处理,例如更换驱动电机、PLC等,维护费用低。
2、关节型机器人:软件系统集成化,库函数直接调用,是其软件优点。但编程和操控必须由供应商通过专业培训才能完成,而且特殊软件需要收费。维护和维修完全受制于人,由于品牌互相不兼容,硬件故障必须由供应商或厂家直接提供,非市场通用产品,费用高昂。
- 相关推荐
- 热点推荐
- 机器人
-
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述2022-11-24 3772
-
直角坐标机器人&关节机器人的区别详解2022-11-02 4078
-
机器人关节用什么电机?2021-05-27 4297
-
直角坐标机器人的结构组成及在铝锭搬运中的应用2019-06-24 4817
-
浅谈无损检测行业中直角坐标机器人的运用2018-11-04 4537
-
直角坐标机器人的定义及主要特点2017-10-12 4328
-
直角坐标机器人和关节机器人的特性及应用对比2017-10-09 6408
-
直角坐标机器人如何选型2017-08-16 5022
-
大族电机-直角坐标机器人2016-12-25 960
-
关节机器人控制2015-04-29 5499
-
工业机器人的基本结构2015-01-19 9604
-
[转帖]工业机器人的基础知识2010-05-18 4032
-
德国BAHR直角坐标机器人在无损探伤设备的应用2009-04-09 1469
全部0条评论

快来发表一下你的评论吧 !
