

基于迪文T5L屏的智能柜管理系统
描述
方案采用T5L芯片作为主控,T5L芯片直接驱动串行总线舵机进行柜门开关控制,并处理由辅助控制器汇总的传感器采集数据,驱动液晶屏进行数据显示。具备异常预警功能,有自动照明系统,昏暗光线情境下也可正常使用。
01
方案说明
1.T5L屏作为主控,直接驱动串行总线舵机。采用飞特STS系列舵机,力矩涵盖4.5KG至40KG,协议通用;
2.串行总线舵机具有电流、力矩、温度、电压保护功能,安全性高于常规电机;
3.一个串口支持同时控制254个舵机。
02
方案设计
(1)方案框图
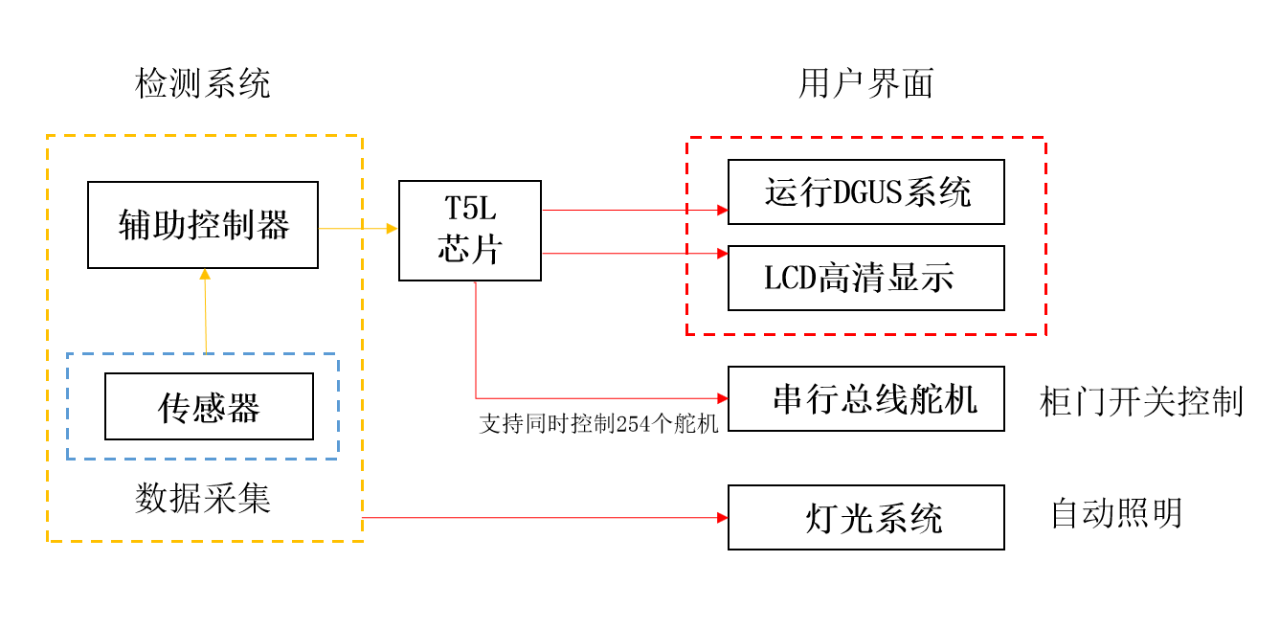 图1 方案框图
图1 方案框图
(2)机械结构图为防止停电智能柜门处于失控状态,本设计采用双舵机设计,开门舵机负责柜门的开关动作,门闩舵机负责门闩动作。停电后,由于门闩的存在,即使开门舵机卸力,智能柜也依然处于上锁状态。机械结构如图所示:
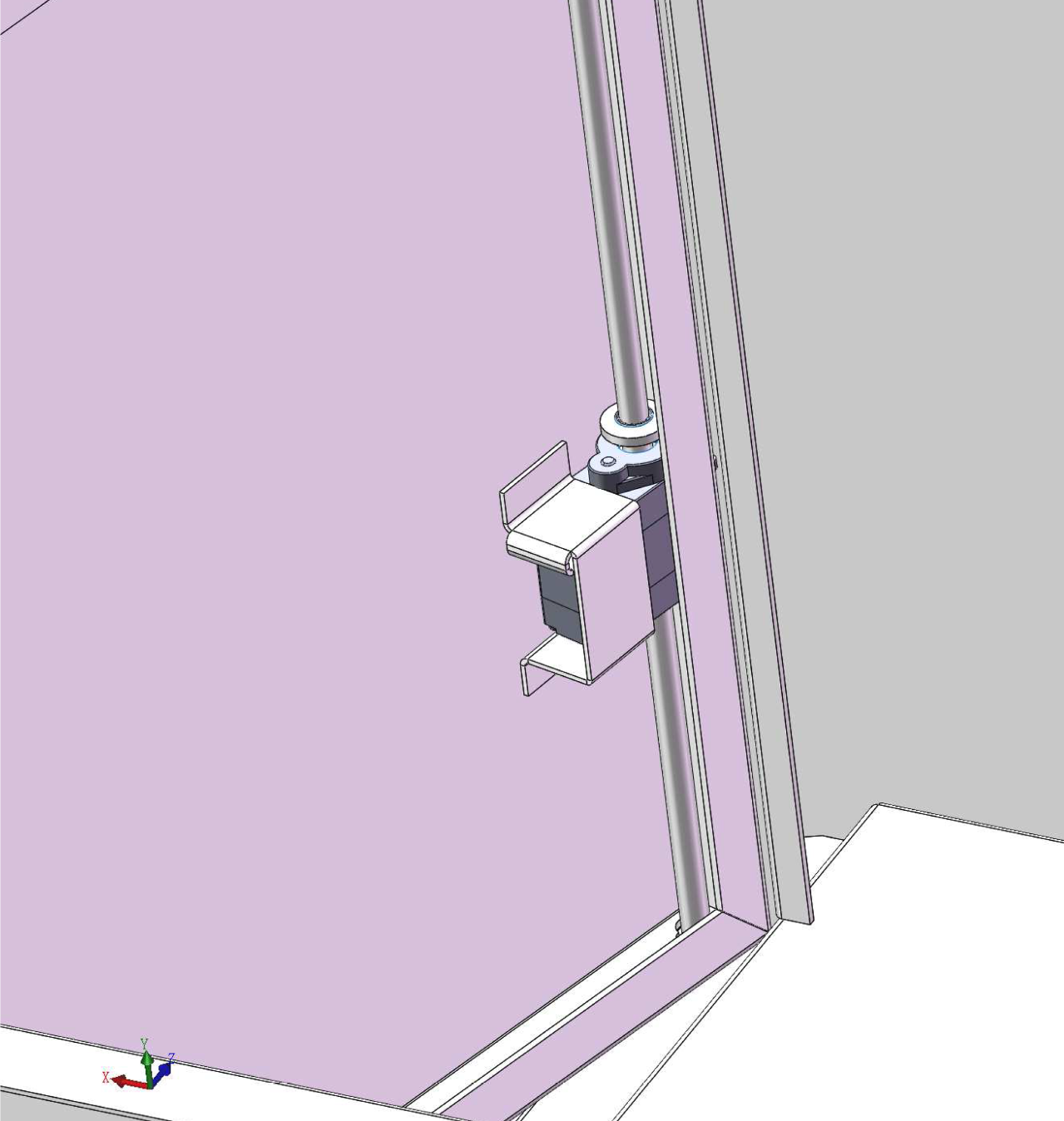
图2 开门结构图
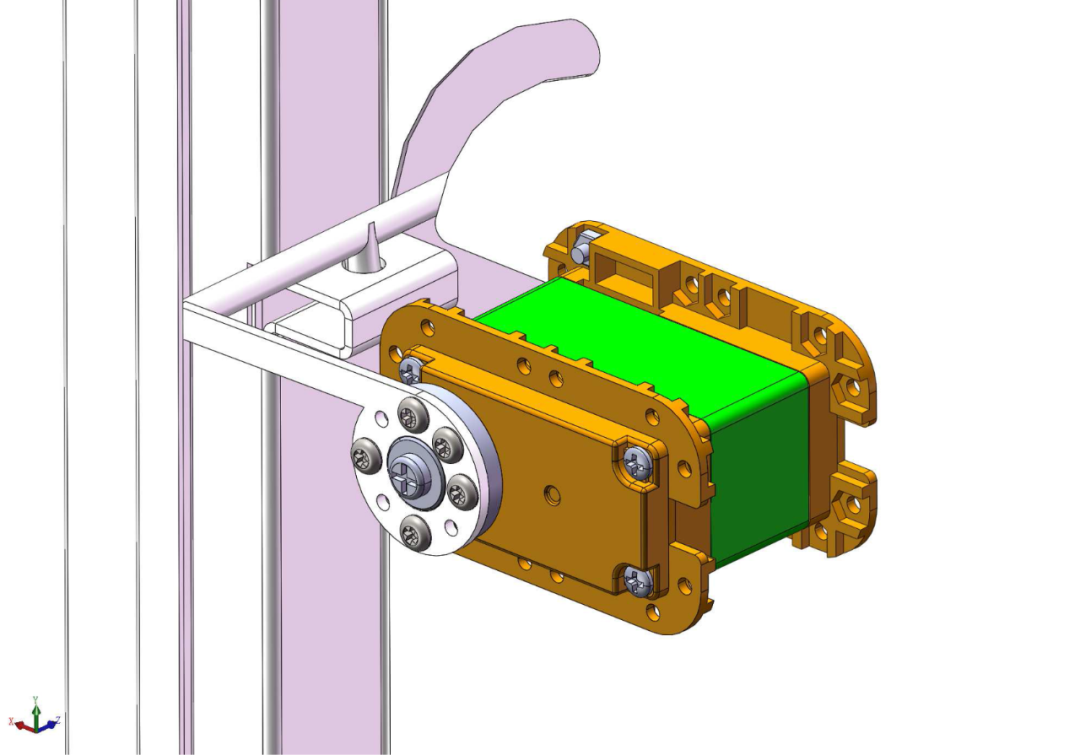 图3 关门结构图
图3 关门结构图
(3)DGUS工程界面设计图
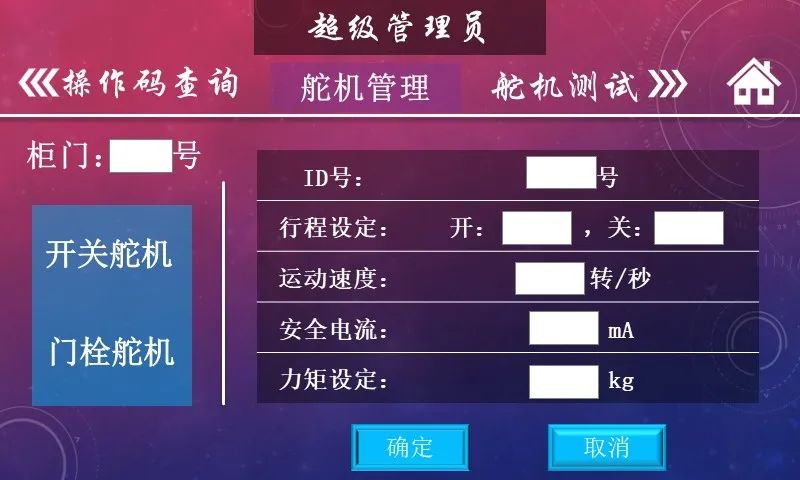
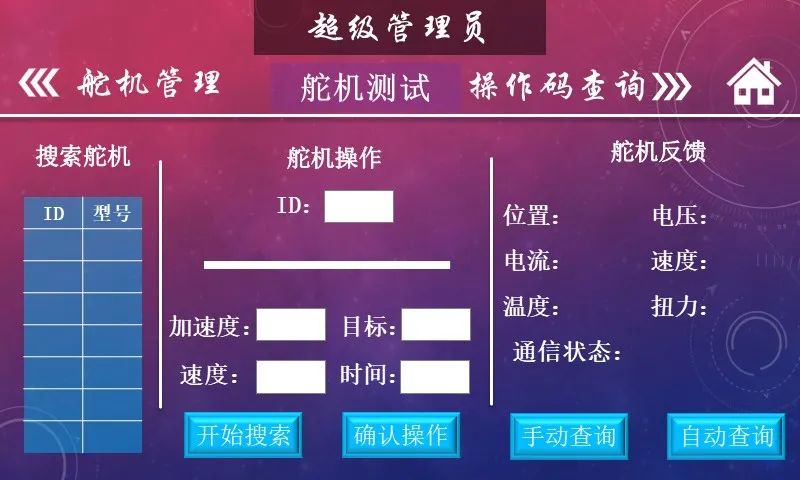
图4 DGUS界面设计参考图
(4)电路原理图
电路原理图分为三部分:主电路板(舵机驱动电路+辅助控制器+接口)、降压电路、灯光电路(安装在柜子里边)。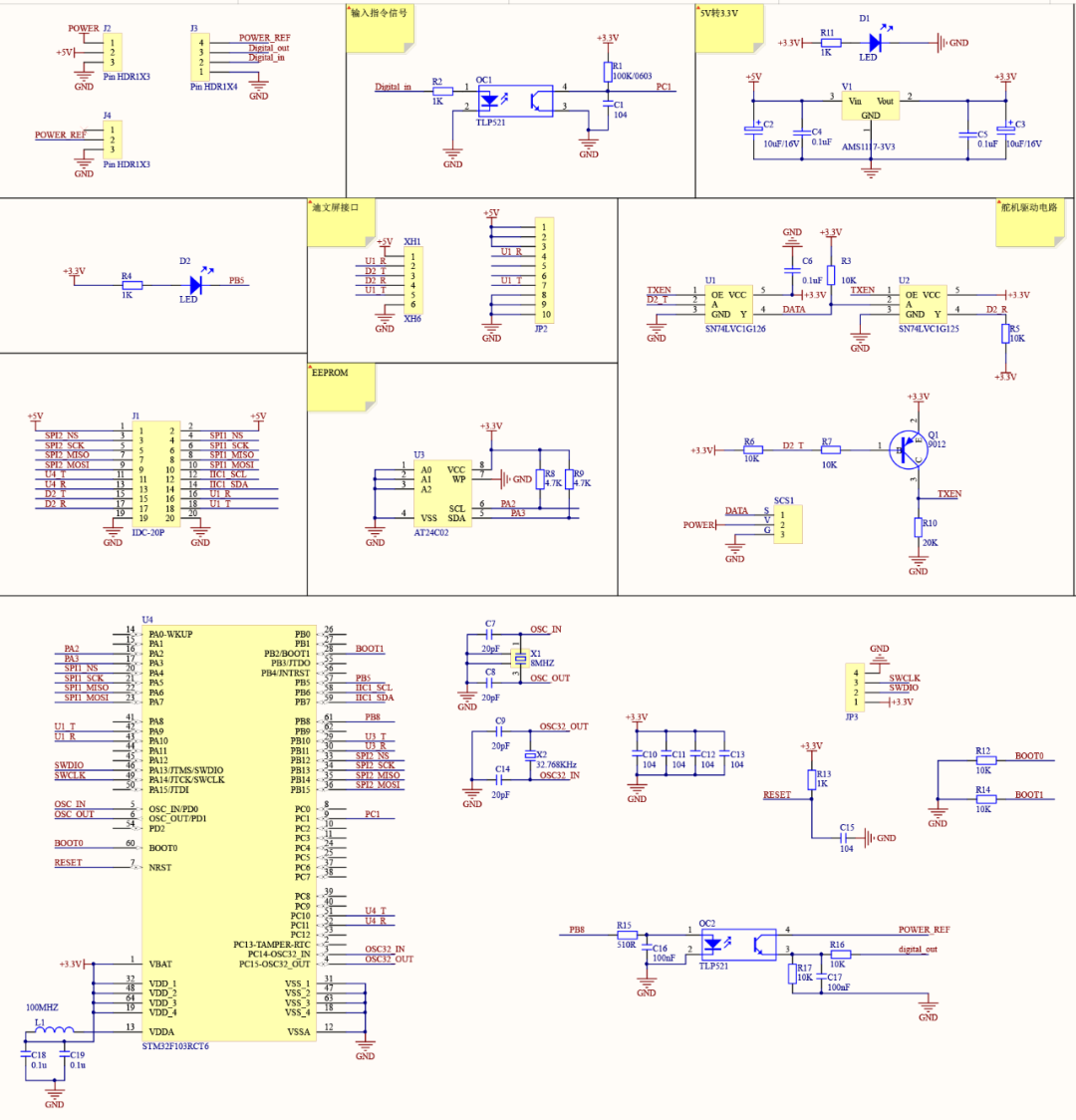 图5 主板原理图
图5 主板原理图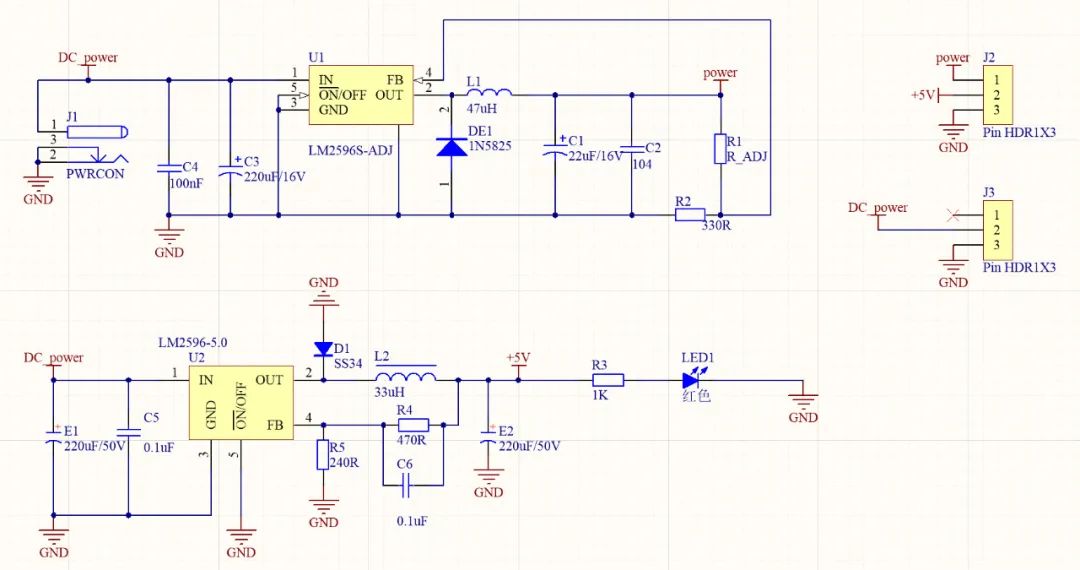 图6 降压板原理图
图6 降压板原理图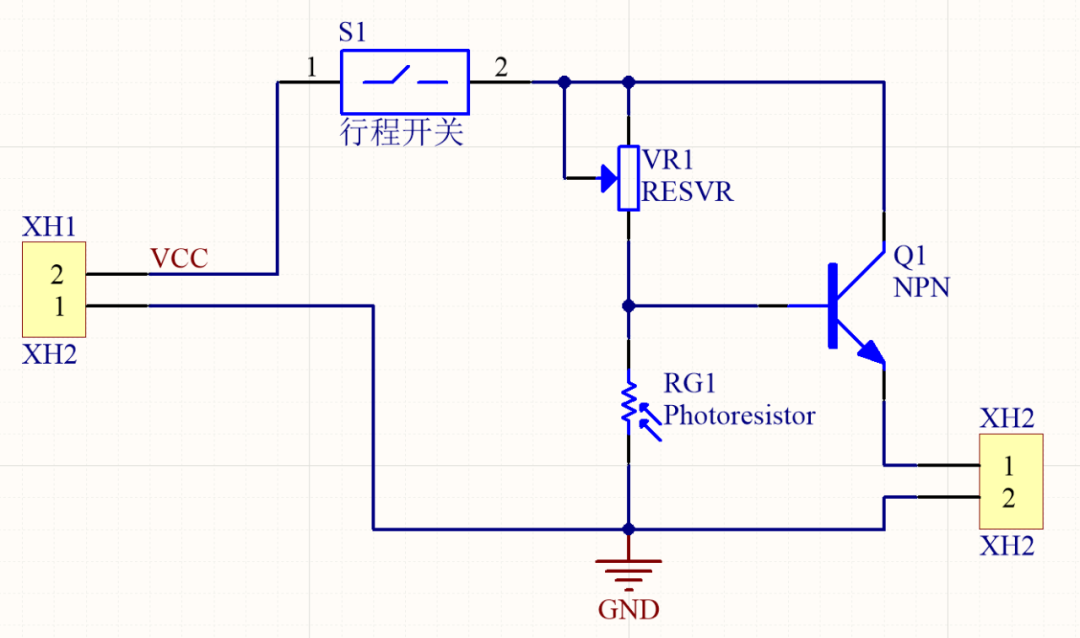 图7 灯光原理图
图7 灯光原理图
03
程序示例
温湿度检测与刷新(由辅助控制器驱动AHT21,将温湿度数据写入迪文屏)/*****************温湿度更新**********************/
void dwin_Tempe_humi_update( void)
{
uint8_t Tempe_humi_date[20]; //发送给液晶屏的指令
AHT20_Read_CTdata(CT_data); //读取温度和湿度
Tempe_humi_date[0]=0x5A;
Tempe_humi_date[1]=0xA5;
Tempe_humi_date[2]=0x07;
Tempe_humi_date[3]=0x82;
Tempe_humi_date[4]=(ADDR_TEMP_HUMI>>8)&0xff;
Tempe_humi_date[5]=ADDR_TEMP_HUMI&0xff;
Tempe_humi_date[6]=((CT_data[1] *200*10/1024/1024-500)>>8)&0xff;
Tempe_humi_date[7]=((CT_data[1] *200*10/1024/1024-500))&0xff;//计算得到温度值(放大了10倍,如果t1=245,表示现在温度为24.5℃)
Tempe_humi_date[8]=((CT_data[0]*1000/1024/1024)>>8)&0xff;
Tempe_humi_date[9]=((CT_data[0]*1000/1024/1024))&0xff; //计算得到湿度值(放大了10倍,如果c1=523,表示现在湿度为52.3%)
Usart_SendString( USART_DWIN,Tempe_humi_date,10);
}
- 相关推荐
- 热点推荐
- 迪文屏
-
什么是T5L?2019-02-20 9552
-
怎么实现基于STM32F407与迪文串口屏T5L系列的串口通信?2021-12-06 2864
-
使用迪文T5L系列单片机时某个控件总是引起系统复位2021-12-13 1090
-
【迪文COF结构智能屏试用体验】开箱+环境搭建2022-03-11 4334
-
【迪文COF结构智能屏试用体验】基于迪文COF结构智能屏的继电器控制加热设备2022-03-31 10934
-
【迪文COF结构智能屏试用体验】基本开发流程2022-04-08 10552
-
迪文T5L系列ASIC2022-04-07 4665
-
分享|基于迪文T5L智能屏的净水机智能控制系统方案2023-01-14 2340
-
浏览器网页与T5L迪文屏串口深度扩展(Node-RED技术)2023-12-09 2260
-
【开源获奖案例】基于T5L智能屏的指纹识别解决方案2024-07-06 1465
-
【开源获奖案例】基于T5L智能屏的EQ均衡效果器2025-02-14 1396
-
【开源获奖案例】基于T5L智能屏的FM收音机2025-03-28 1163
-
【开源获奖案例】基于T5L智能屏的零食机2025-04-30 934
-
【开源获奖案例】基于T5L智能屏的音乐播放与歌词显示方案2025-05-08 1120
-
【开源获奖案例】AI智能交互新方案:基于T5L智能屏的AI DeepSeek大模型2025-07-12 1433
全部0条评论

快来发表一下你的评论吧 !
