

车规级MCU常用的11个参数盘点
描述
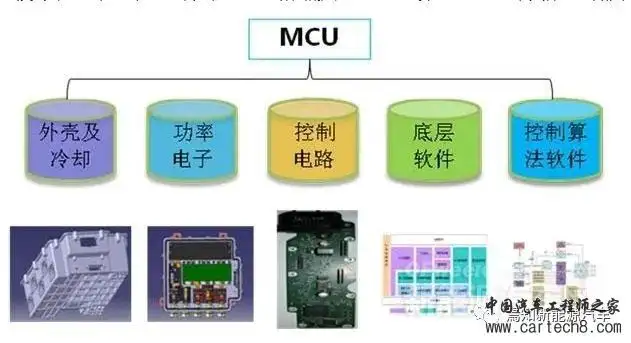
MCU是新能源汽车特有的核心功率电子单元,通过接收VCU的车辆行驶控制指令,控制电动机输出指定的扭矩和转速,驱动车辆行驶。实现把动力电池的直流电能转换为所需的高压交流电、并驱动电机本体输出机械能。同时,MCU具有电机系统故障诊断保护和存储功能。
MCU的设定参数较多,每个参数均有一定的选择范围,使用中常常遇到因个别参数设置不当(参数设定通过CAN通讯或仿真器进行设定),导致MCU不能正常工作的现象,因此,必须对相关的参数进行正确的设定。
1.控制方式:即速度控制、转距控制、 PID 控制或其他方式。采取控制方式后,一般要根据控制精度进行静态或动态辨识。
2.最低运行频率:即驱动电机运行的最小转速,驱动电机在低转速下运行时,其散热性能很差(风冷型),电机长时间运行在低转速下,会导致驱动电机烧毁。而且低速时,其电缆中的电流也会增大,也会导致电缆发热。
3.最高运行频率:一般的MCU最大频率到 60Hz ,有的甚至到 400 Hz ,高频率将使驱动电机高速运转,这对普通电机来说,其轴承不能长时间的超额定转速运行,电机的转子是否能承受这样的离心力。
4.载波频率:载波频率设置的越高,其高次谐波分量越大,这和电缆的长度,电机发热,电缆发热,IGBT发热等因素是密切相关的。
5.电机参数:MCU在参数中设定电机的功率、电流、电压、转速、最大频率,这些参数可以从驱动电机铭牌中直接得到。
6.跳频:在某个频率点上,有可能会发生共振现象,特别在整个装置比较高时;在控制压缩机时,要避免压缩机的喘振点(空调压缩机)。
7.加减速时间加速时间就是输出频率从 0 上升到最大频率所需时间,减速时间是指从最大频率下降到 0 所需时间。通常用频率设定信号上升、下降来确定加减速时间。在驱动电机加速时须限制频率设定的上升率以防止过电流,减速时则限制下降率以防止过电压。
加速时间设定要求:将加速电流限制在MCU过电流容量以下,不使过流失速而引起高压系统断电保护;减速时间设定要点是:防止平滑电路电压过大,不使再生过压失速而使高压系统断电保护。加减速时间可根据负载计算出来,但在调试中常采取按负载和经验先设定较长加减速时间,通过起、停驱动电机观察有无过电流、过电压报警;然后将加减速设定时间逐渐缩短,以运转中不发生报警为原则,重复操作几次,便可确定出最佳加减速时间。
8.转矩提升又叫转矩补偿,是为补偿因电动机定子绕组电阻所引起的低速时转矩降低,而把低频率范围 f/V 增大的方法。设定为自动时,可使加速时的电压自动提升以补偿起动转矩,使驱动电机加速顺利进行。根据负载特性,尤其是负载的起动特性,通过试验可选出较佳曲线。对于变转矩负载,如选择不当会出现低速时的输出电压过高,而浪费电能的现象,甚至还会出现驱动电机带负载起动时电流大,而转速上不去的现象。
9.电子热过载保护本功能为保护电动机过热而设置,它是MCU内 CPU 根据运转电流值和频率计算出电动机的温升,从而进行过热保护。本功能只适用于 “ 一拖一 ” 场合。
电子热保护设定值 (%)=[ 电动机额定电流 (A)/ MCU额定输出电流 (A)]×100% 。
10.频率限制即MCU输出频率的上、下限幅值。频率限制是为防止误操作或外接频率设定信号源出故障,而引起输出频率的过高或过低,以防损坏设备的一种保护功能。在应用中按实际情况设定即可。此功能还可作限速使用,将MCU上限频率设定为某一频率值,这样就可使最高车速在一个固定、较低的工作速度上。
11.转矩限制可为驱动转矩限制和制动转矩限制两种。它是根据MCU输出电压和电流值,经 CPU 进行转矩计算,其可对加减速和恒速运行时的冲击负载恢复特性有显著改善。转矩限制功能可实现自动加速和减速控制。假设加减速时间小于负载惯量时间时,也能保证驱动电机按照转矩设定值自动加速和减速。
驱动转矩功能提供了强大的起动转矩,在稳态运转时,转矩功能将控制电动机转差,而将电动机转矩限制在最大设定值内,当负载转矩突然增大时,甚至在加速时间设定过短时,也不会引起高压系统断电保护。在加速时间设定过短时,电动机转矩也不会超过最大设定值。驱动转矩大对起动有利,以设置为 80 ~ 100% 较妥。
制动转矩设定数值越小,其制动力越大,适合急加减速的场合,如制动转矩设定数值设置过大会出现过压报警现象。如制动转矩设定为 0% ,可使加到主电容器的再生总量接近于 0 ,从而使驱动电机在减速时,不使用制动电阻也能减速至停转而不会过压保护。但在有的负载上,如制动转矩设定为 0% 时,减速时会出现短暂空转现象,造成MCU反复起动,电流大幅度波动,严重时会使MCU报故障,应引起注意。
免责声明:本文源自网络,文中观点不代表贞光科技立场,如有侵权请联系删除。
- 相关推荐
- 热点推荐
- 车规MCU
-
车规级MCU缺货持续2年,上海航芯助力国产市场2023-02-03 1946
-
量产发布!国民技术首款车规级MCU N32A455上市2023-02-20 1230
-
解析车规级MCU的技术难点2021-02-16 12801
-
车规级MCU国产替代空间巨大2021-04-03 3861
-
详细介绍新能源汽车MCU常用的11个参数2021-07-09 2907
-
痞子衡嵌入式:盘点国内车规级MCU厂商2021-10-25 1722
-
国内车规级MCU厂商知多少?2021-10-28 3877
-
国民技术车规MCU型号应用与参数2022-11-30 2636
-
通过车规级认证的MCU国产公司盘点2022-09-01 2608
-
贞光科技:什么是车规级MCU?2022-10-13 2612
-
国民技术车规MCU型号应用与参数2022-11-22 6112
-
中国车规级半导体产业链盘点2022-11-23 1559
-
车规级MCU运用、分类解读2022-12-06 3696
-
2022年17家国产车规级原厂MCU盘点2023-03-06 76174
全部0条评论

快来发表一下你的评论吧 !
