

直坐标机械手的优缺点都有哪些?
描述
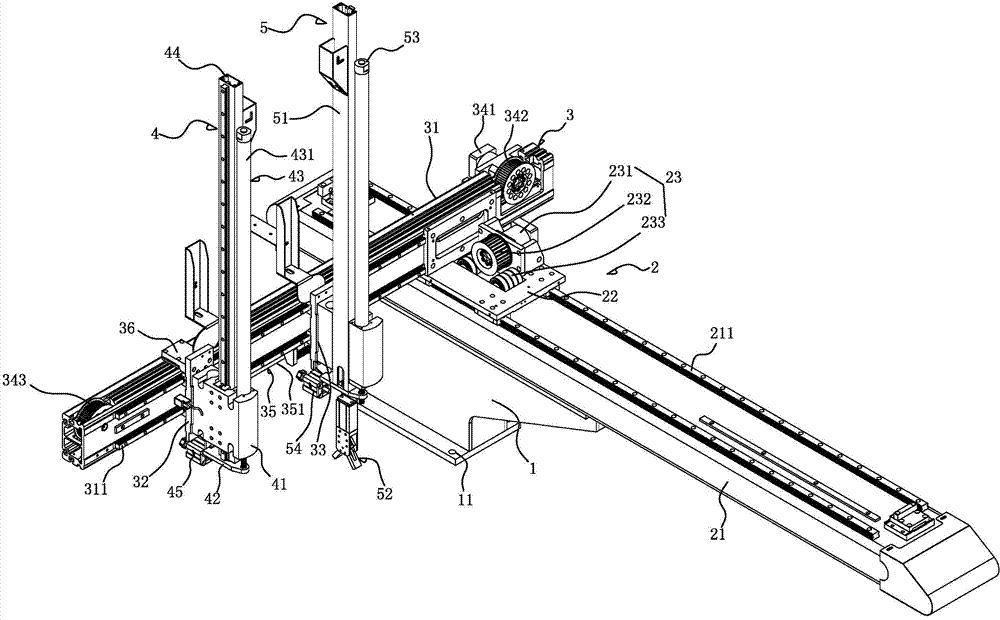
直坐标机械手一般为X、Y、Z三轴,加持转塔式手爪,实现精准的机床装夹和收料。而在实际应用中会遇到哪些问题,有哪些优缺点呢?下面简单概述一下:
一、直坐标机械手的优点
1、采用高强度结构钢,整体强度高,不易振动摇晃。滚轮导轨运动机构,承载能力极强,刚性极佳。2、安装调整要求低,相比于繁杂的关节机器人,结构设计便于人员理解、操作简单、维护方便。
3、寿命长,不会像普通直线导轨滑块易受加工精度及润滑影响失效损坏。
4、可配置为全闭环系统,即会实时检测机械手控制系统发出指令和实际位置是否一致(如非全闭环、齿轮损坏等实际不移动不准确,而控制系统无法感知),Z轴检测到往下掉时可机械锁止,防止发生安全事故。
5、便于维护,导轨极易维护,即使损坏更换也极其方便。
6、直坐标机械手一般架在设备上方,不占用地面空间,更利于车间规划和作业的便利性。
7、性价比高,相对于同等负重的关节机器人,桁架机械手的造价成本更低。
二、直坐标机械手的缺点
直坐标机械手的高度和长度,以及机械手臂的活动行程一般根据机床外形的宽度和高度以及机床的结构尺寸量身定制,直坐标机械手的这种特性导致其只适用于一种机床或者适用于外形尺寸接近(相差不超过100mm)和结构都大致相同的机床。直坐标机械手较大的缺点就是通用性较差。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机械手
-
机械手 OEM 的应用2024-09-18 1022
-
坐标机械手配件有哪些?2023-12-07 1980
-
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述2022-11-23 4759
-
直坐标机械手的优缺点都有哪些?2022-11-18 3058
-
与机械手通信,首先暂停机械手,后续继续运行机械手程序后,labview接收不到指令2021-06-21 7142
-
金属冲压机械手的种类繁多,它们该如何分类2021-02-24 1158
-
使用桁架式机械手有哪些优势?2020-11-25 1732
-
搬运机械手有哪些形式2019-06-12 5653
-
机械手图册——机械手设计必看2018-02-01 2598
-
东芝机械手操作2017-10-20 3380
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2644
-
基于PLC的机械手混合驱动控制2011-08-15 1280
-
机械手的顺序控制系统的设计2010-07-08 1307
-
PLC控制机械手设计2008-12-13 2974
全部0条评论

快来发表一下你的评论吧 !
