

机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述
描述
机械手的手臂运动形式有所不同,一般情况下机械手可以分为:直角坐标式、多关节式、圆柱坐标式、极(球)坐标式四种形式。
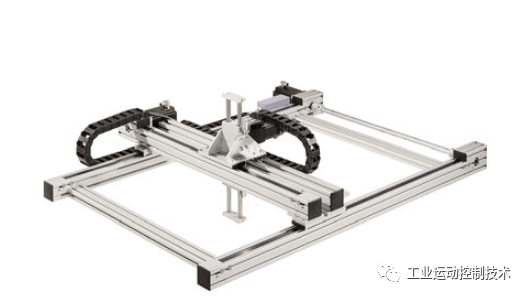
1.直角坐标式就是机械手在直角坐标系的三个坐标轴方向作直线移动,即机械手的前后移动、上下升降、左右移动。直角坐标机器人可达到很高的位置精度(μm级)。针对不同的应用场合,对直角坐标机器人有不同的设计要求,比如根据对精度、速度的要求选择不同的传动方式,根据特定的工艺要求为末端工作头选择不同的夹持设备(夹具、爪手、安装架等),以及对于示教编程,坐标定位、视觉识别等工作模式的设计选择等,从而使之能满足于不同领域、不同工况的应用要求。
2.多关节式一般就是手臂会分为大臂和小臂两段,大小臂之间由肘关节连接,而大臂与立柱之间又连接成肩关节,再加上手腕与小臂之间的腕关节。但编程和操控必须由供应商通过专业培训才能完成,而且特殊软件需要收费。维护和维修完全受制于人,由于品牌互相不兼容,硬件故障必须由供应商或厂家直接提供,非市场通用产品,费用高昂。

3.圆柱坐标式这种就是机械手作前后伸缩、上下升降和在水平面内摆的动作。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。

4.极(球)坐标式就是机械手作前后伸缩、上下俯仰和左右摆动的动作。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作空间是一个类球形的空间。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 机械手
-
机械手的直角坐标|多关节|圆柱坐标|极(球)坐标式运行方式简述2022-11-23 4747
-
直坐标机械手的优缺点都有哪些?2022-11-17 2029
-
直角坐标机器人&关节机器人的区别详解2022-11-02 3999
-
直角坐标机器人&关节机器人的区别详解2022-10-27 2974
-
金属冲压机械手的种类繁多,它们该如何分类2021-02-24 1154
-
坐标机器人的特点_坐标机器人的应用2020-08-24 3131
-
最近在做焊接机器人机械臂的仿真,找到一个直角坐标转球坐标的vi,看的不是太明白,有大神可以解答吗2020-04-13 1632
-
直角坐标机器人的定义及主要特点2017-10-12 4294
-
直角坐标机器人和关节机器人的特性及应用对比2017-10-09 6378
-
大族电机-直角坐标机器人2016-12-25 941
-
哪位大神做过直角坐标机械手,雕刻机也行 毕业设计让做,直接懵逼了.2016-04-01 3805
-
求问labview中极坐标与直角坐标之间的转换解答2012-05-21 5128
-
无线电探向用的极坐标直角坐标转换器和测试图案发生器2009-09-23 1047
-
德国BAHR直角坐标机器人在检测设备上的应用2009-04-09 897
全部0条评论

快来发表一下你的评论吧 !
