

【文章转载】车辆动力学及场景建模软件DYNA4新特性介绍
描述
DYNA4为乘用车和商用车提供各种复杂的仿真模型,包括车辆动力学模型、发动机模型、动力系统模型、电机模型、ADAS传感器和交通环境模型等。用户通过DYNA4可以安全高效地进行功能开发和测试验证,例如可用于开发早期的MIL和SIL仿真环境,或者ECU硬件在环系统(HIL)。基于DYNA4可以实现纵向、横向以及垂向控制的整车级仿真,包含制动、转向、主动悬架等。DYNA4还提供丰富的道路、基础设施及交通环境模型,为驾驶辅助和智能驾驶提供重要的虚拟仿真环境平台。
DYNA4不仅可以和CANoe无缝集成,而且具有高包容性的外部接口,支持与第三方软硬件集成,以及与用户的算法程序集成(Window/Linux)。除了支持传统ECU的IO接口外,还支持目前热门的ADAS及智能驾驶集成,实现将驾驶员的驾驶意图和驾驶行为与DYNA4动力学模型集成验证,例如智驾的车道线保持LKA功能、路径规划、漂移等外部智驾模型等与DYNA4动力学模型集成,支持Window/Linux平台下的诸多语言环境。
针对不同操作环境,
量身定制对应的许可证形式
>
桌面版Desktop Edition
适合于个人仿真研究以及学习
该许可证面向指定的用户和局域网内部设备的用户,需提供电脑用户及电脑物理信息
>
台架版Test Bench Edition
适用于个人电脑或测试台架上的使用,例如硬件在环
该许可证用于测试台架的设备激活,目前也支持SIL,许可证激活可不绑定于电脑
>
服务器版本Server Edition
适用于大规模仿真、多运算节点的持续测试任务。DYNA4在没有主界面模式下执行仿真
该许可证可用于项目或团队的网络访问、云端多实例并发的场景
下图为使用DYNA4服务器版本实现CI/CT车辆控制单元持续集成测试。
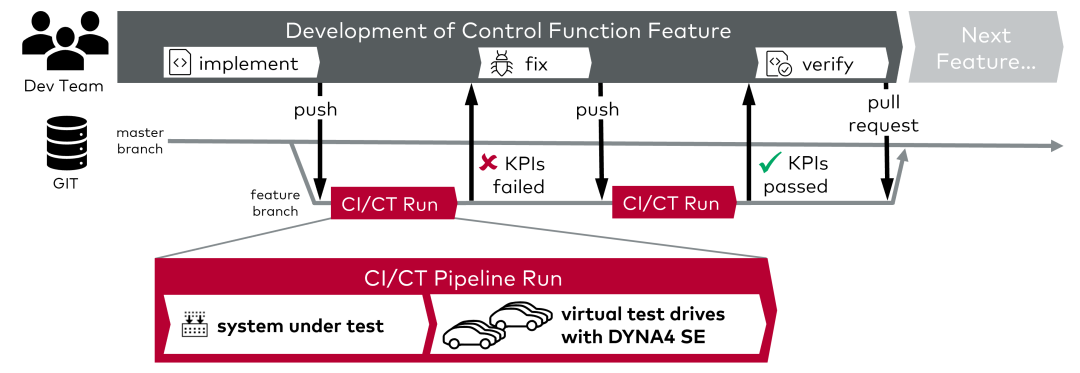
图1:DYNA4车辆控制单元持续集成测试CI/CT测试
DYNA4模型仿真目标在之前基础上,增加了Linux Executable 以及FMU Linux等的运行模式,具体如下:
>
Support of Windows 11
>
Support of CANoe 16
>
Support of Linux FMU for exporting DYNA4 Simulation Models
>
Support of Concurrent SimWorkbench 2021.2-1
>
Support of DYNA4 Linux Executable
全新界面以及参数自检功能
>
全新的模型参数界面
模型与模型参数的结构树更加清晰,容易理解
紧凑显示项目中已激活的以及可用的测试场景和模型配置
在模型配置和场景视图列表中,双击便可灵活方便地选择并激活所需的模型和场景
>
报错自检功能
智能提醒错误的信息及对应错误位置,例如模型参数缺失、执行目标未曾编译等
在之前的日志视图基础上,增加了整体潜在的问题的概述
提供快速修复的功能选项

图2:DYNA4全新的模型参数统一界面以及报错自检功能
后处理功能提升
后处理的结果可以快速概览以及分析,全新的视角视图
通过仿真结果界面的条件筛选可以方便快速选择所需的内容
在信号浏览视图里,展开结果文件选择信号来进行数据分析,方便实现多文件的结果比较
结果文件(MDF格式)不需要打开MATLAB即可进行分析
MDF文件记录DYNAanimation动画里面的信号

图3:功能丰富、操作便捷的后处理界面
新增场景库车辆以及新能源汽车示例
新增Tesla Model X的纯电动汽车传动和动力学模型示例,可生动表达传动时功率能量流的动画示意;同时场景里增加诸多3D的整车数模,如下:
Tesla Model X 2016
VW Arteon R Shooting Brake 2021
VW ID Buzz 2023
VW ID Space Vizzion 2023
VW Tiguan R 2021
VW ID.3 2020, VW ID.4 2020
International LTTractor Truck 2018,
Forage Harvester,
Krampe Big Body 650 Carrier Farm Trailer 2017
VW T6 2016
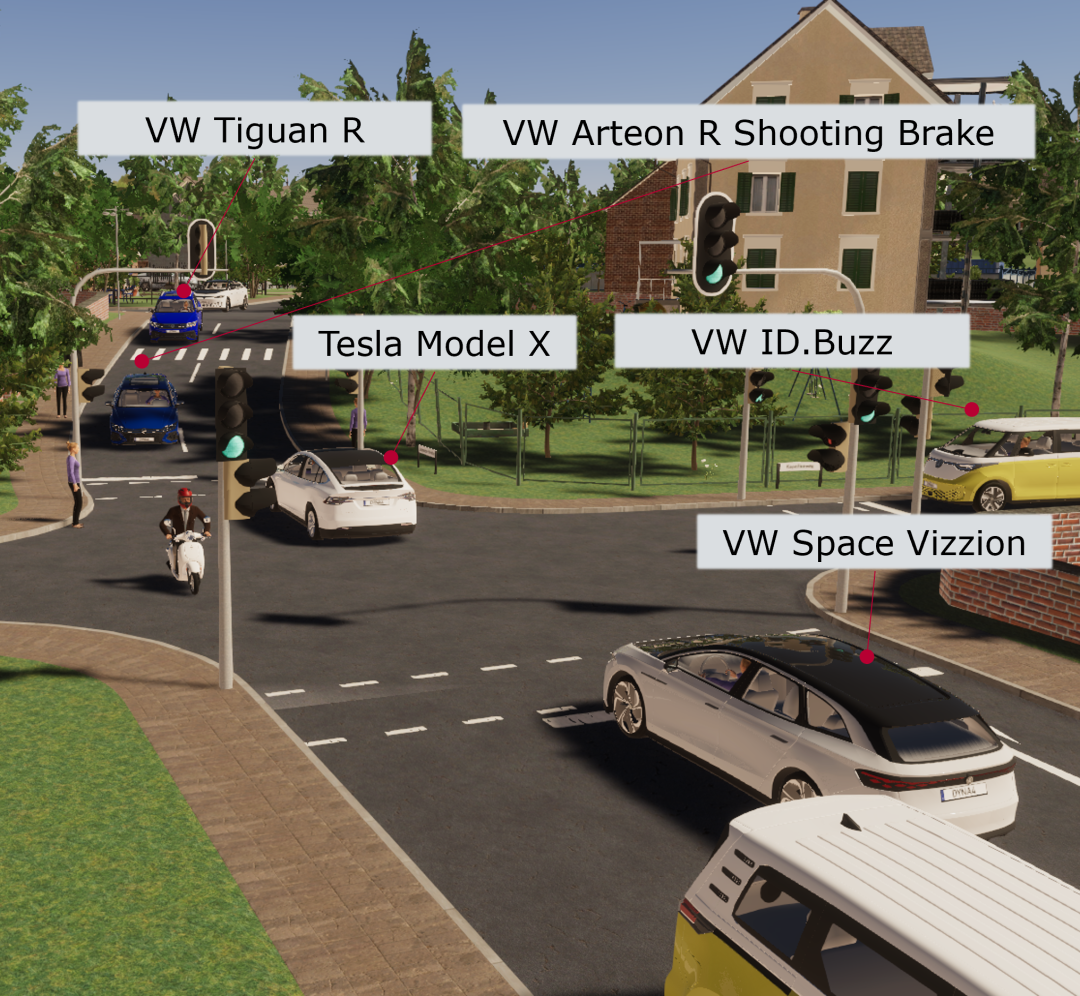
图4:新增的场景及3D整车数模
可视化传感器Visible Object Sensor
分类语义分割的功能
>
可视化传感器
可以输出边界框的二维像素坐标
可以使用对象类别而不仅是单个对象进行分割
分割后的图像仍保持相机图像畸变的状态
>
Visible Object Sensor和Lidar Sensor检测到的物体类别可以为每个传感器定制,即可以切换甚至过滤掉指定的类别
>
Visible Object Sensor和Ground Truth Sensor可提供所检测到物体的理想化3D边界框信息
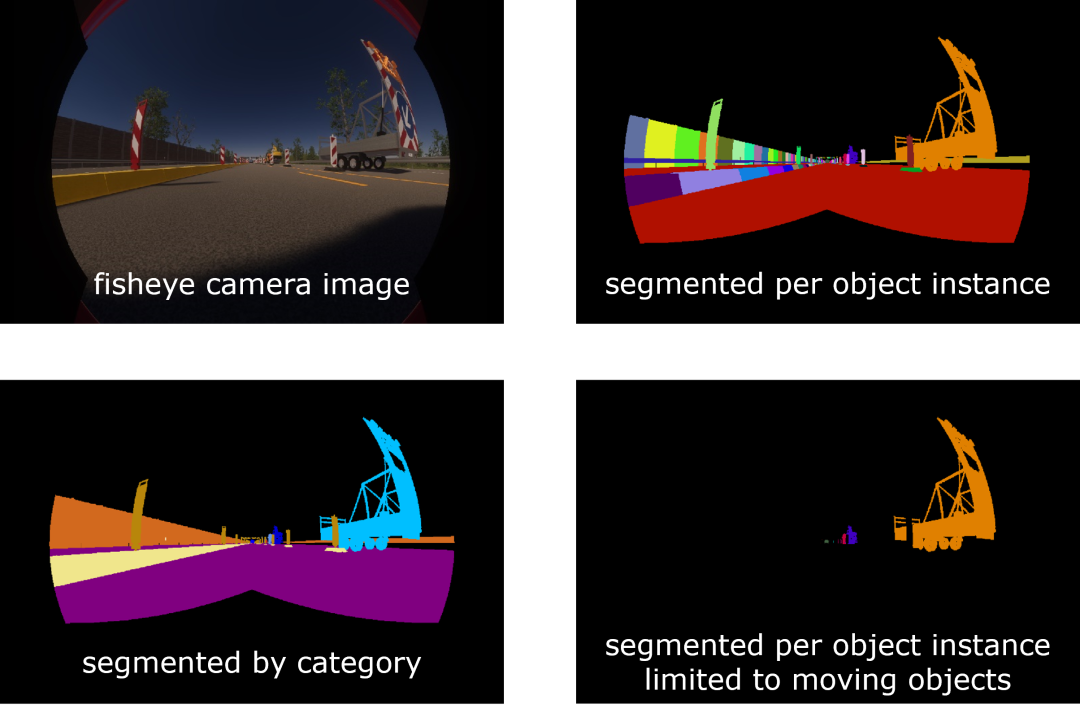
图5:含图像畸变的不同语义分割形式下的类别分割情况
高包容性的外部接口
DYNA4不仅可以和CANoe无缝集成,而且具有高包容性的外部接口,支持与第三方软硬件集成,以及与用户的算法程序集成(Window/Linux)。除了支持传统ECU的IO接口外,还支持目前热门的ADAS及智能驾驶集成,实现将驾驶员的驾驶意图和驾驶行为与DYNA4动力学模型集成验证,例如智驾的车道线保持LKA功能、路径规划、漂移等外部智驾模型等与DYNA4动力学模型集成,支持Window/Linux平台下的诸多语言环境。
下图为将DYNA4里的变量接口与CANoe连接,实现了在CANoe里实时控制DYNA4车辆的纵向和横向控制。图中1处为DYNA4底层Simulink与CANoe的接口,2处为CANoe里横纵向控制的面板设置。如果需要ECU的其他信号接口,可以方便地从DYNA4底层Simulink Bus里拉出所需的信号。
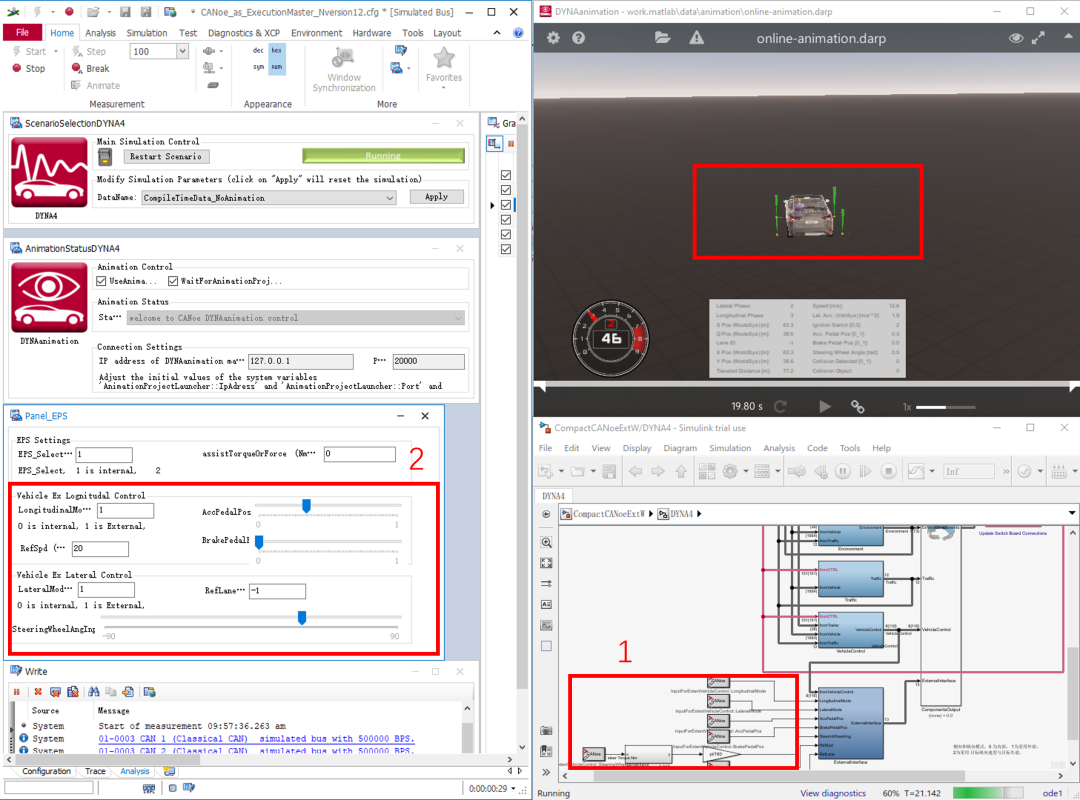
图6:DYNA4底层Simulink与CANoe的接口及在CANoe里实现车辆横纵向控制
DYNA4除了CANoe等诸多平台接口支持外,还支持标准的模型交换接口Functional Mock-up Interface(FMI)的形式,可支持Window & Linux下的运行。
以Linux下的C++语言调用为例。首先在模型里拉出所需的接口,然后在DYNA4主界面选择“FMU Linux Export”模式,然后进行编译,再将编译结果拷贝到Linux电脑。下图为Ubuntu 20.04环境下,C++语言程序调用DYNA4的仿真情况。
如需其他语言平台,可以在GitHub里下载对应FMU调用的开源程序。例如,C++语言的开源程序为FMI4cpp,Python程序为PythonFMU,Java程序为FMI4j。整体来说,Linux下调用DYNA4是较为简洁方便的,且并不需要安装额外的依赖库,极大方便客户的算法与DYNA4的模型进行集成仿真测试。
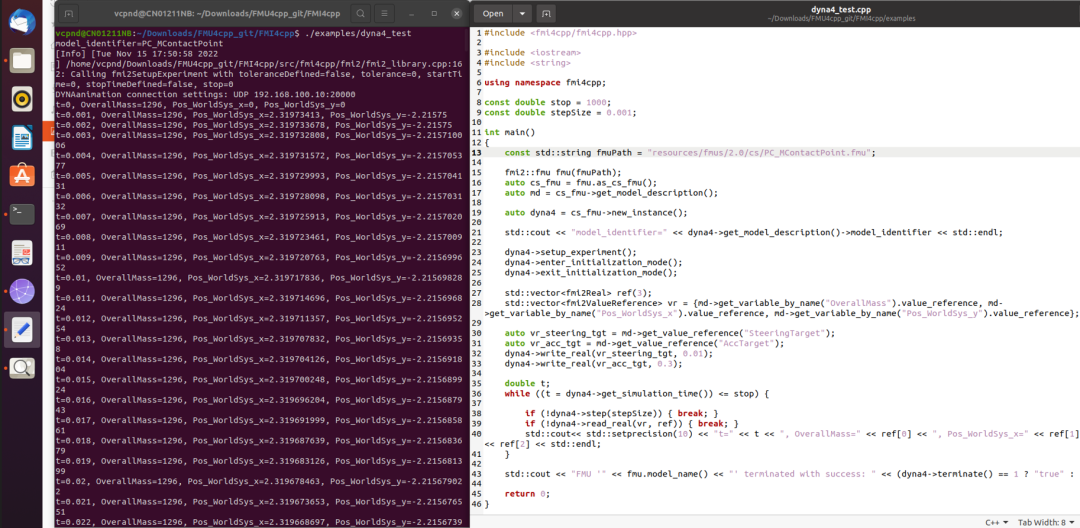
图7:Ubuntu 20.04环境下,C++语言程序调用DYNA4的仿真情况
外部接口集成的应用举例
辅助智能驾驶
含有路径规划的外部驾驶模型集成
不管是车道保持、还是点对点的路径规划智能驾驶,车辆都会去代替/接管驾驶员去进行车辆的驾驶控制。模拟驾驶员对车辆的控制,比较通行的驾驶员算法有MPC(模型预测控制)、LQR(线性二次调节器)及PP(Pure Pursuit)追随预瞄;这里采用郭孔辉院士在《汽车操纵动力学原理》书籍里的“单点预瞄”的思路,在DYNA4动力学里集成,仅作思路的分享。
DYNA4设置过程如下图,1处为从车辆里提取出需要的车辆状态量;2处根据所预设的任意Path,计算车辆位置与目标Path的预瞄点位置和角度的偏差两个输出量;3处为根据“单点预瞄”的思路进行部分修改,求得期望的方向盘转角;4处为对方向盘转向进行限制,规范其合理的变化速率以及上下限值;5处为将外部的方向盘转角再输入给DYNA4整车模型。
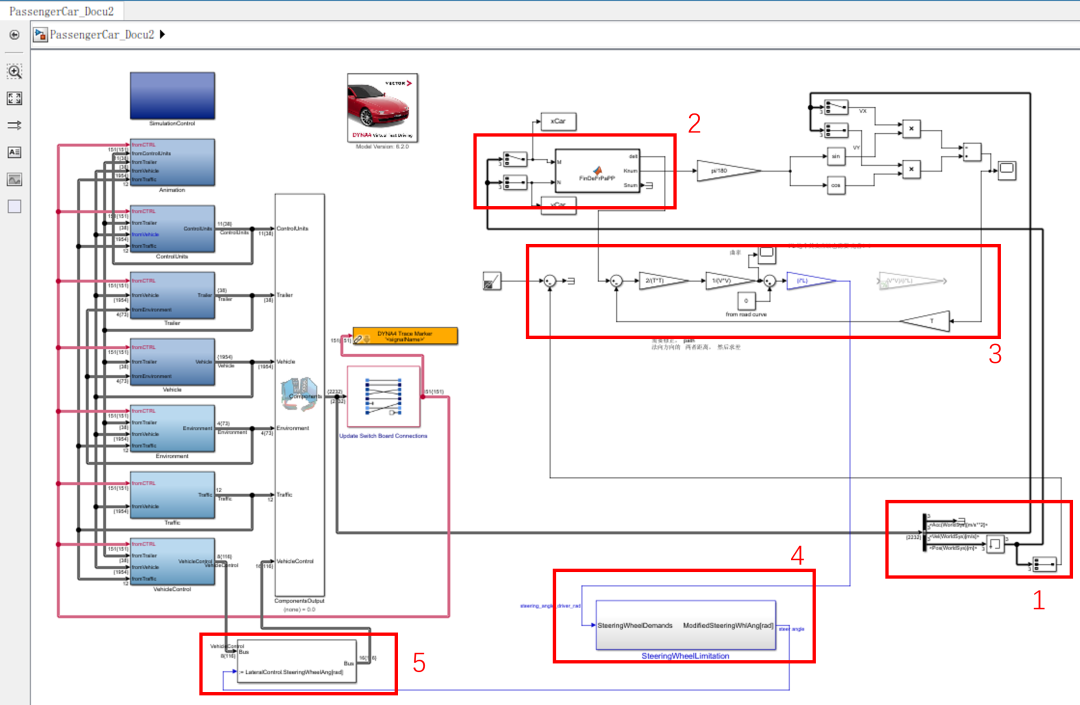
图8:含有路径规划的外部驾驶员智驾算法集成_单点预瞄
路径追随的单点预瞄仿真效果如下图,目标Path路径为侧向偏置2m的水平车道,末端是直径20m的圆周;车辆的纵向行为是36km/h的纵向匀速运行,采用DYNA4内部闭环控制;可以看出车辆从原点(0,0)处快速地驶入目标路径,然后在路径末端进行绕圆运动。考虑预瞄算法的本身会导致一些跟随的偏离,整体的路径追随的效果还是不错的。这里整体的算法都是在Simulink内部,当然也可以是在其他平台、其他语言环境下的集成。
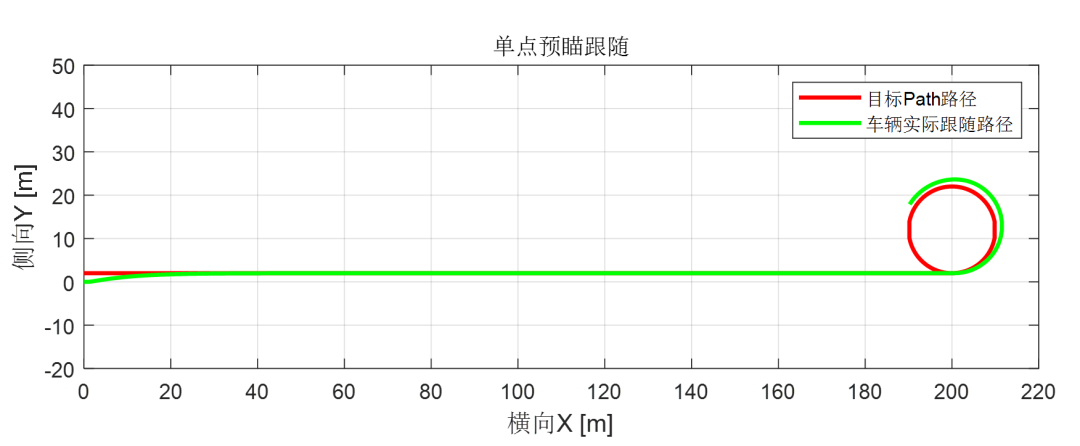
图9:路径追随的单点预瞄效果
助力整车“漂移”外部智驾的集成实现
除了让车辆按照智能路径规划智驾以外,还可以让车辆实现高难度动作如“漂移”,这应该也是智驾的一种体现。对于更复杂的驾驶员闭环控制算法“漂移”,所对应的控制算法从输入输出数量以及整体逻辑,都会相对更复杂些。通过匹配提取DYNA4模型里的输入输出接口,可以方便地实现车辆“漂移”的驾驶员模型嵌入。在车辆低附着路面漂移时,车速可以不用过高。通常采用后驱的车进行“漂移”更容易,一般是前轮依然保持附着转向的能力,而后轮进行滑移。如下图可以看出,漂移时,前轮与路径前进方向基本是“平行的”,而后轮基本是滑移状态,有较大的侧偏角,整个车身也是斜的。
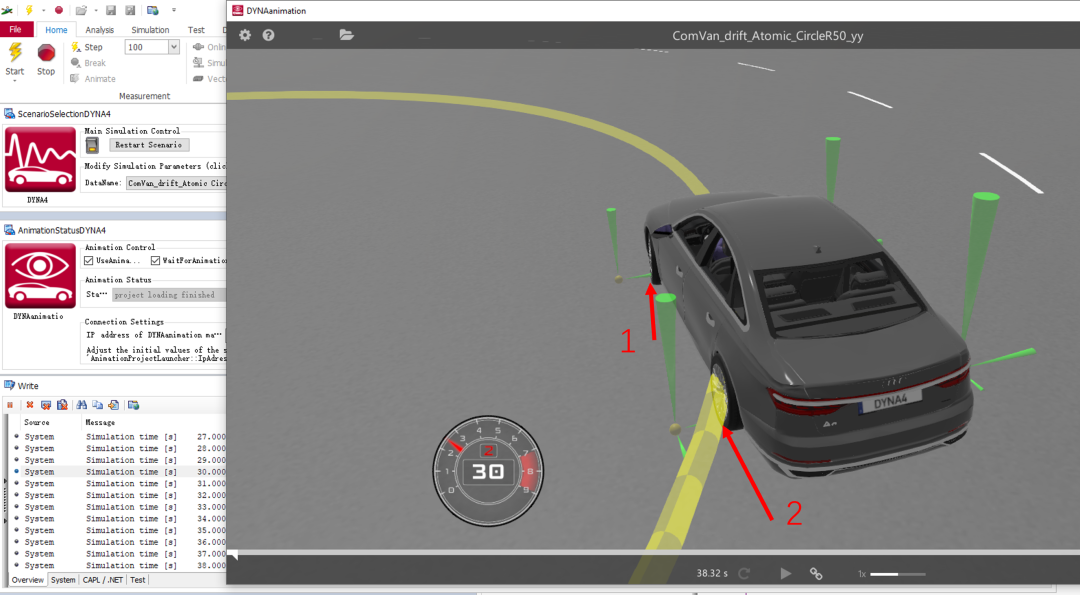
图10:漂移智驾的外部控制算法集成
上图是智驾控制算法在DYNA4和CANoe里集成,实现助力漂移算法的验证,以供参考。控制算法可以在Simulink或CANoe内部,也可以是外部其他形式。当然,不局限于平台,可在Linux或云端运行部署,且无需安装诸多额外的依赖库,极大方便客户的(智驾)算法与DYNA4的模型进行集成仿真测试。
-
轮毂电机驱动电动汽车垂向动力学控制研究综述2025-03-07 555
-
Adams多体动力学仿真解决方案全面解析2025-04-17 8162
-
DYNA4卡车车辆稳定性控制效果模拟效果#车辆动力学仿真北汇信息POLELINK 2024-01-10
-
[下载]想了解多体动力学软件吗?有教程分享及免费试用下载2009-03-24 4375
-
经纬恒润自主研发的综合车辆动力学仿真软件ModelBase2022-03-18 5110
-
综合车辆动力学仿真软件ModelBase的简单介绍2022-03-25 4973
-
车辆动力学虚拟仿真环境平台DYNA4的新特性介绍2022-11-25 5328
-
如约而至!ModelBase:经纬恒润自研车辆动力学仿真软件2021-12-31 1314
-
DYNA4集成SUMO在CANoe中实现V2X三维场景2023-10-18 4325
-
聊聊车辆仿真软件之DYNA4——Overview2023-10-19 2375
-
基于车辆动力学模型的横向控制2023-11-15 2270
-
刚性机械臂的动力学建模2023-11-17 2168
-
Vector DYNA4 R10新特性介绍2025-12-23 925
-
DYNA4 R10新特性2026-02-04 823
-
基于DYNA4实现摄像头畸变应用2026-02-26 2778
全部0条评论

快来发表一下你的评论吧 !
