

改善RMS功率检波器在整个温度范围内的输出准确度
设计测试
描述
在基站设计中,稳定的温度性能极其重要,因为视基站周边情况和地点的不同而不同,环境温度可能变化很大。RMS检波器如果随温度变化的准确度很高,就可以提高基站设计的电源效率。LTC5582和双通道LTC5583是一个RMS检波器系列的两款器件,LTC5582在最高10GHz的频率范围内可提供极其稳定的温度性能(从-40°C至85°C),而LTC5583的频率范围则在6GHz内。不过,它们的温度系数随频率而改变,而没有温度补偿下,随温度变化而产生的误差可能大于0.5dB。因此,有时有必要针对不同的频率优化温度补偿,以改善准确度,使误差<0.5dB。此外,温度补偿可以仅用两个外部电阻器实现,而无需外部电路。
输出电压的变化由以下等式决定:
?VOUT=TC1x(TA-tNOM)+TC2x(TA-tNOM)2+detV1+detV2(等式1)
其中TC1和TC2分别是1阶和2阶温度系数。TA是实际的环境温度,tNOM是室内基准温度25°C,detV1和detV2是RT1和RT2未设定为零时的输出电压变化。
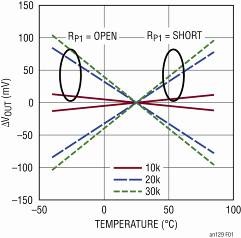
图1:1阶?VOUT随温度的变化
就LTC5582和LTC5583而言,计算温度补偿电阻值的方法是相同的(参见图2和图3)。两个控制引脚是RT1和RT2,RT1设定TC1(1阶温度补偿系数),RT2设定TC2(2阶温度补偿系数)。如果不需要温度补偿,那么将RT1和RT2短路到地,就可以很方便地关闭温度补偿功能。
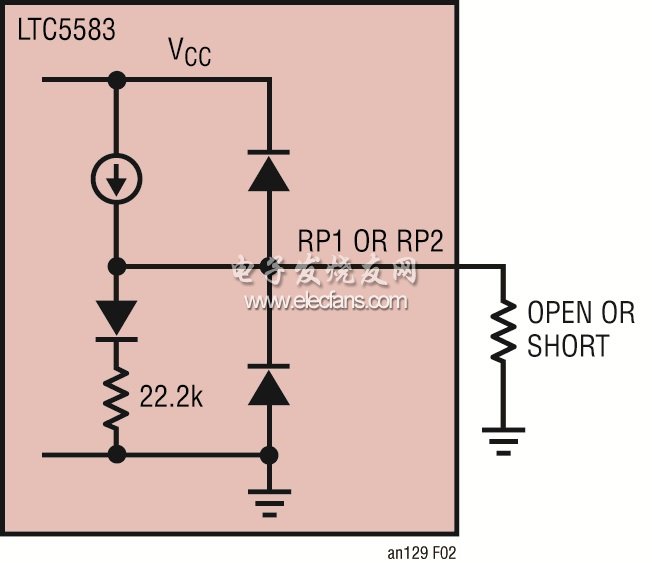
图2:引脚RP1和RP2的简化原理图
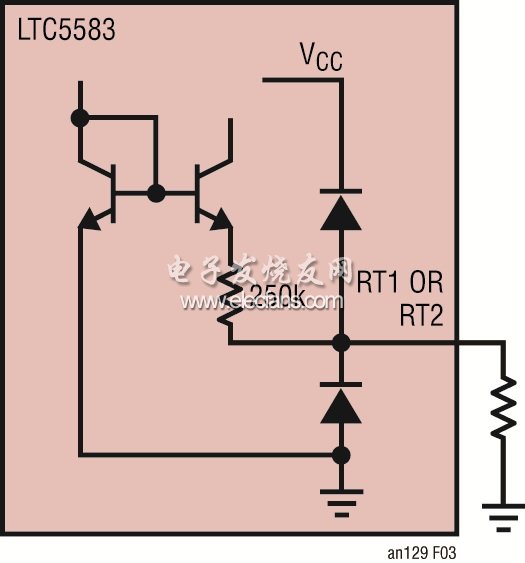
图3:引脚RT1和RT2的简化原理图
LTC5583的温度补偿设计
LTC5583包括两个额外的引脚RP1和RP2,RP1控制TC1的极性,RP2控制TC2的极性。不过,在采用一个固定的RT1或RT2值时,温度系数的大小相等,只是极性倒转。通道A和通道B共享补偿电路,因此两个通道一起受到控制。
图1说明了在1阶温度补偿的情况下,VOUT作为温度的函数是怎样变化的。图中仅显示了3个电阻值,以说明增大电阻值会使斜线斜率增大。斜线极性由RP1引脚控制。
图4说明了2阶温度补偿对VOUT的影响。该曲线的极性由RP2控制。其曲率取决于电阻值。1阶和2阶温度补偿合起来的总体影响由等式1给出。

图4:2阶VOUT随温度的变化
以LTC5583在900MHz输入时的情况为例。第一步是测量没有温度补偿时VOUT随温度的变化。图5显示未补偿时的VOUT。线性误差随温度的变化以25°C时的斜线和截取点为基准。为了最大限度地减小输出电压随温度的变化,红色(85°C)的线性度曲线必须下移,蓝色(-40°C)的线性度曲线必须上移,以与黑色室温时的曲线一致,并尽可能多地重叠。接下来就是一步一步地设计了。

图5:在900MHz时未补偿的LTC5583
第一步。以dB为单位从图5估计所需的温度补偿。例如,读取输入功率为-25dBm时的曲线值,这是动态范围的中部。将以dB为单位的线性误差乘以30mV/dB(典型的VOUT斜率),以将单位转换为mV。
低温(-40°C)=+13mV或+0.43dB
高温(85°C)=-20mV或-0.6dB
这是随温度变化所需的输出电压调节量。
第二步。确定RP1和RP2的极性以及1阶和2阶补偿解决方案。为了找到解决方案,设a=1阶项,b=2阶项。设定这两项的值,使它们满足-40°C和85°C的温度补偿要求。
a–b=+13mV(等式2)
a–b=-20mV(等式3)
a=16.5(1阶解决方案)
b=3.5(2阶解决方案)
等式2和等式3中“a”和“b”的极性由1阶项和2阶项的极性决定,这样,它们的和在低温(-40°C)时满足+13Mv和高温时满足-20mV(85°C)的调节要求。参见图6。1阶项和2阶项或者为正、或者为负。因此。总共有4种组合。在这种情况下,仅当两项均为负时,它们的和才能满足所需补偿。

图6:1阶和2阶解决方案的极性
图7显示了在-40°C和+85°C时所需的1阶和2阶补偿。请注意,1阶和2阶补偿的极性是负的,这样,当两条曲线相加时,它们的和才能对VOUT产生所需的调节。结果,TC1和TC2为负,RP1和RP2从图8和图9决定。请注意,两个解决方案的值加起来在-40°C时约等于+13mV,在+85°C时约等于-20mV。

图7:温度补偿解决方案
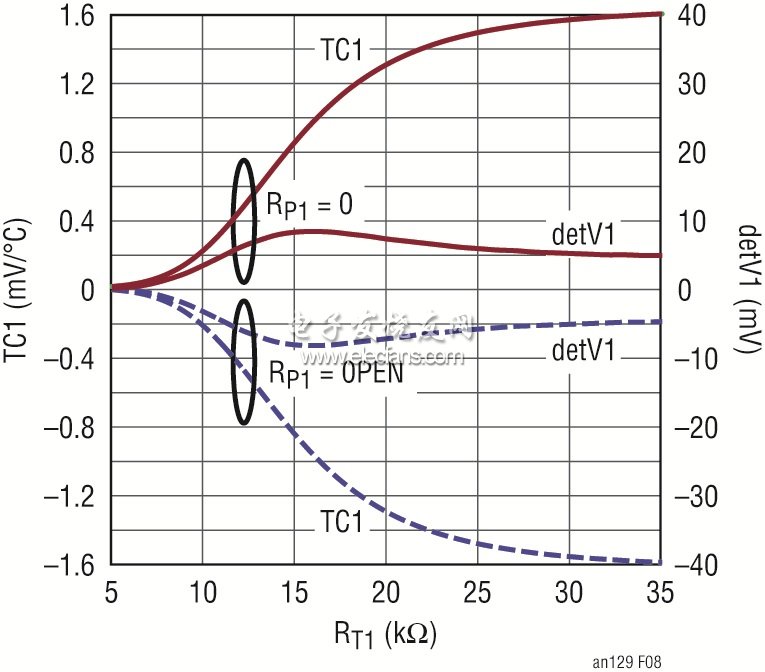
图8:1阶温度补偿系数TC1随外部RT1值的变化
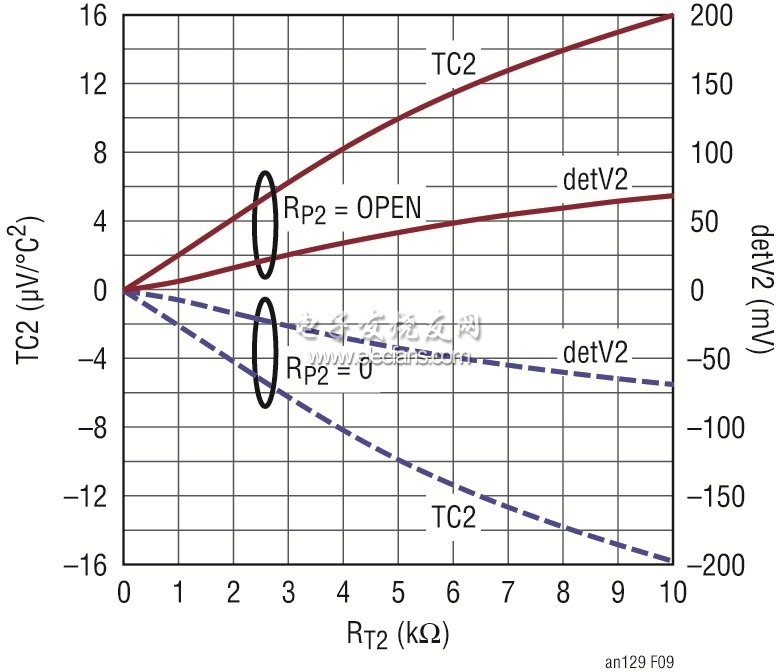
图9:2阶温度补偿系数TC2随外部RT2值的变化
RP1=开路
RP2=短路
第三步。计算一个温度极限的温度系数,利用图8和图9确定RT1和RT2的电阻值。
a=16.5=TC1x(85-25);
TC1=0.275mV/°C
RT1=11KΩ(根据图8)
b=3.5=TC2x(85-25)2;TC2=0.972uV/°C2
RT2=499Ω(根据图9)
图10显示了LTC5583的两个输出通道之一随温度变化的性能。请注意与图5中未补偿VOUT相比的温度性能改进。就大多数应用而言,这也许能满足要求了。不过,对于某些需要更佳准确度的应用,可以执行二次迭代以进一步改善温度性能。为了简化计算可忽略detV1和detV2项,因为这两项不受温度影响。因此,解决方案是不精确的。不过,在改进随温度变化的准确度方面,这么做很有用,如下所示。
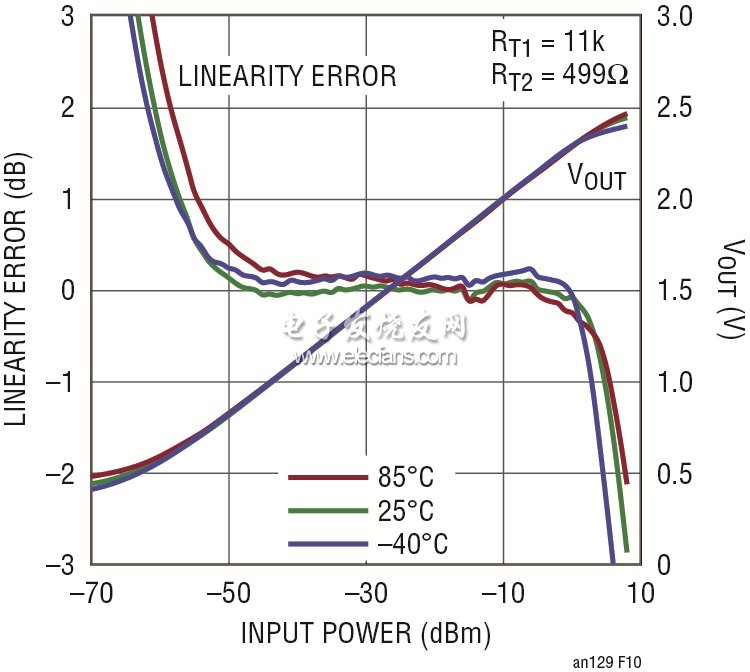
图10:1阶迭代温度补偿的LTC5583输出
2次迭代计算
第一步。从图10中确定所需补偿,采用与第一次迭代时相同的方法。
低温(-40°C)=-3mV或-0.1dB
高温(85°C)=-3mV或-0.1dB
给1次迭代增加新值
低温(-40°C)=-3mV+13mV=10mV
高温(85°C)=-3mV-20mV=-23mV
重复第二步和第三步,计算RT1和RT2值。
RT1=11KΩ
RT2=953Ω
RP1=开路
RP2=短路
经过两次迭代后的性能结果如图11所示。随着温度变化,动态范围为50dB(0.2dB线性误差)和56dB(1.0dB的线性误差)。从表1中可查到其他频率时的温度补偿值
。

图11:2阶迭代后温度补偿的VOUT
表1:LTC5583要在各种不同的频率时实现最佳的温度性能,推荐采用以下设定和电阻值

这种迭代过程可以一再重复,以进一步提高准确度。就大多数应用而言,这将允许设计师按照所需要的准确度引入补偿。
LTC5582单检波器
计算LTC5582的补偿值以求出RT1和RT2的方法是相同的,而且更容易,因为极性已经预先确定了。TC1和TC2为负。从表2中可查出在其他频率时的RT1和RT2值。图8和图9中显示的补偿系数对LTC5582而言是不同的。在数据表中进行查找,以获得更多信息。
表2:LTC5582要在各种不同的频率时实现最佳的温度性能,推荐采用以下RT1和RT2值

结论
LTC5582和LTC5583仅用两个外部补偿电阻器,就可以提供卓越的温度性能。计算补偿电阻器的过程很简单,而且可以迭代,以实现更高的性能。本文所举例子是LTC5583在900MHzRF输入时的情况,但是在该IC允许频率范围内的任何频率上,同样的方法都可以应用于LTC5582和LTC5583。随温度变化的性能相当一致。所得性能结果为,随温度变化的准确度可低于输出电压的1%。
-
LTC5596具35dB动态范围的100MHz至40GHz对数线性RMS功率检波器技术手册2025-03-24 1505
-
高准确度RMS功率检波器LTC5596介绍2023-04-14 2183
-
改善高动态范围RMS射频功率检波器的温度、稳定性和线性度2023-01-16 4609
-
ADI对数RMS检波器2022-10-11 2122
-
CN0340 检波范围为95 dB的真RMS RF检波器2021-06-05 1595
-
MT-082: RF RMS功率检波器(TruPwr™)2021-03-21 1142
-
100MHz 至 40GHz RMS 功率检波器 具 1dB 准确度和 35dB 动态范围2021-03-20 928
-
40GHz RMS检波器在高频功率测量有什么用处2019-07-30 3141
-
求推荐最适合在1.30MHz到1.40MHz频率范围内的RMS检波器2019-02-15 2383
-
TI远程与本地温度传感器准确度在+/-1℃范围内2018-12-03 2833
-
射频检波器如何应用于特定应用中2018-10-30 1998
-
LTC5596HDC#TRPBF功率检波器2018-06-14 1349
-
LTC5596RMS功率检波器应用指南2017-09-19 1659
-
100MHz至40GHz RMS功率检波器 具1dB准确度和35dB动态范围2016-09-29 4313
全部0条评论

快来发表一下你的评论吧 !
