

【产品应用】AWorksLP样例详解(MR6450)-- GPIO
描述
AWorksLP对外设进行了高度抽象化,为同一类外设提供了相同的接口,应用程序可以轻松跨平台。本文以MR6450平台为例,介绍AWorksLP GPIO外设基本用法。
 简介
简介
GPIO(General Purpose Input and Output)是通用输入输出口。通俗地说,就是一些引脚,可以通过它们对外输出电平信号或者通过它们读取外部的电平信息。 将I/O口用作普通输入/输出功能时,有两种常见的使用方式:一种是用作普通的输入/输出接口;一种是用作中断输入接口,即当指定的输入状态事件发生(比如:下降沿)时,触发用户自定义的回调函数。
接口介绍
函数列表:
函数原型 | 简要描述 |
| aw_err_t aw_pin_cfg (int pin, uint32_t flags); | 配置引脚属性 |
| aw_err_t aw_gpio_get (int pin); | 读取引脚的输入/输出值 |
| aw_err_t aw_gpio_set (int pin, int value); | 设置引脚输出值 |
| aw_err_t aw_gpio_toggle (int pin); | 翻转引脚的输出值,即高电平变低电平,低电平变高电平 |
| aw_err_t aw_gpio_trigger_cfg (int pin, uint32_t flags); | 配置引脚“触发条件”,触发条件可位或 |
| aw_err_t aw_gpio_trigger_connect (int pin, aw_pfuncvoid_t pfunc_callback, void *p_arg); | 连接一个回调函数到引脚 |
| aw_err_t aw_gpio_trigger_disconnect (int pin, aw_pfuncvoid_t pfunc_callback, void *p_arg); | 断开引脚的回调函数 |
| aw_err_t aw_gpio_trigger_on (int pin); | 开启引脚的触发功能 |
| aw_err_t aw_gpio_trigger_off (int pin); | 关闭指定引脚的触发功能 |
使用aw_pin_cfg (int pin, uint32_t flags) 接口配置pin为gpio功能时,flags参数详见下表。
GPIO属性配置表:
GPIO属性 | 宏定义 | 值 | 描述 |
| GPIO模式 | AW_PIN_CFG_GPIO_INPUT | 1<<0 | 输入模式 |
| AW_PIN_CFG_GPIO_OUTPUT | 2<<0 | 输出模式 | |
| AW_PIN_CFG_GPIO_OUTPUT_LOW | 3<<0 | 输出模式且输出低 | |
| AW_PIN_CFG_GPIO_OUTPUT_HIGH | 4<<0 | 输出模式且输出高 | |
| 上下拉功能 | AW_PIN_CFG_FLOAT | 0<<3 | 浮空 |
| AW_PIN_CFG_PULL_UP | 1<<3 | 上拉 | |
| AW_PIN_CFG_PULL_DOWN | 2<<3 | 下拉 | |
| AW_PIN_CFG_PULL_UP_DOWN | 3<<3 | 同时使能上下拉 | |
| 输出模式 | AW_PIN_CFG_OUTPUT_MODE_DRIVE | 0<<5 | 直接输出 |
| AW_PIN_CFG_OUTPUT_MODE_OPEN_DRAIN | 1<<5 | 开漏输出 | |
| AW_PIN_CFG_OUTPUT_MODE_PUSH_PULL | 2<<5 | 推挽输出 |
配置时,flags参数可以是一个或者多个相关宏定义的组合,简单示例如下:
aw_pin_cfg(pin, AW_PIN_CFG_GPIO_INPUT); /* 引脚配置为输出,浮空(无上下拉),直接输出 */aw_pin_cfg(pin, AW_PIN_CFG_GPIO_OUTPUT);aw_pin_cfg(pin, AW_PIN_CFG_GPIO_INPUT | AW_PIN_CFG_PULL_DOWN ); aw_pin_cfg(pin, AW_PIN_CFG_GPIO_OUTPUT| AW_PIN_CFG_OUTPUT_MODE_PUSH_PULL)
注意:
- 调用配置时,若上表中GPIO属性值存在缺省时,则会使用未偏移前对应值为0的宏定义默认填充,如上述示例中line3;
- 配置时需一次性将flags进行传入,不能每次传递一个属性进行配置进行多次调用,否则可能和期望配置结果不匹配。
使用 aw_gpio_trigger_cfg(int pin, uint32_t flags)接口配置引脚中断时,flags参数见下表。
GPIO中断配置表:
宏定义 | 描述 |
| AW_GPIO_TRIGGER_HIGH | 高电平触发 |
| AW_GPIO_TRIGGER_LOW | 低电平触发 |
| AW_GPIO_TRIGGER_RISE | 上升沿触发 |
| AW_GPIO_TRIGGER_FALL | 下降沿触发 |
配置时,flags参数可以是一个或者多个上表宏定义的组合,简单示例如下:
aw_gpio_trigger_cfg (pin, AW_GPIO_TRIGGER_HIGH);aw_pin_cfg(pin, AW_GPIO_TRIGGER_RISE);aw_pin_cfg(pin, AW_GPIO_TRIGGER_RISE | AW_GPIO_TRIGGER_HIGH ); /* 双边沿触发 */aw_pin_cfg(pin, AW_GPIO_TRIGGER_RISE | AW_GPIO_TRIGGER_FALL);
注意:
- 当设置为不合理条件触发组合(如 AW_GPIO_TRIGGER_HIGH | AW_GPIO_TRIGGER_FALL)时,该函数会返回-AW_EINVAL。
使用样例
AWorksLP SDK相关使用请参考《AWorksLP SDK快速入门(MR6450)——开箱体验》一文,本文不再赘述。
1. 通用IO功能
{SDK}\demos\peripheral\gpio路径下为通用GPIO例程,例程具体代码如下:
#include "aworks.h"#include "aw_delay.h"#include "aw_gpio.h"#include "aw_vdebug.h"
/** * \brief GPIO demo 入口 * \return 无 */void demo_gpio_entry (int gpio){ int i = 0;
aw_kprintf("\nGPIO demo testing...\r\n");
/* LED以1s的周期闪烁5次 */ for (i = 0; i < 5; i++) { aw_gpio_set(gpio, 0);
aw_mdelay(500);
aw_gpio_set(gpio, 1);
aw_mdelay(500); }
/* LED以0.2s的周期持续闪烁 */ for (i = 0; i < 40; i++) { aw_gpio_toggle(gpio); aw_mdelay(100); } aw_kprintf("\nGPIO demo exit...\r\n");}
上述代码中使用aw_gpio_set和aw_gpio_toggle接口分别实现了500ms时间间隔的引脚5次反转以及100ms时间间隔引脚40次反转。在HPM的SDK中,传入该例程函数的引脚为RUN灯,所以最终的实验现象是LED灯先以较慢的速度闪烁,后以较快的速度闪烁,RUN灯的位置如图1所示。
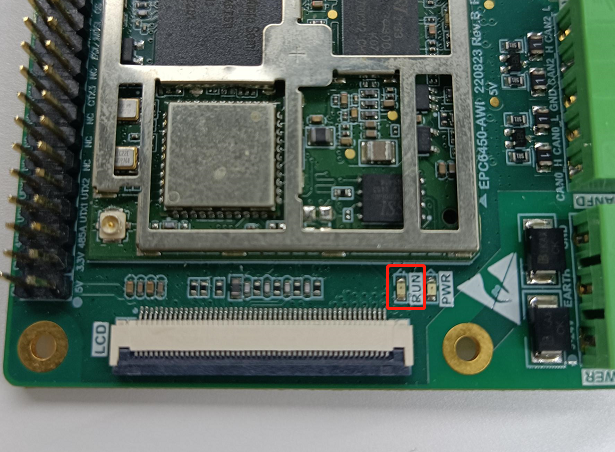
图1 运行灯
2. 中断功能
{SDK}\demos\peripheral\int路径下为通用中断例程,例程具体代码如下:
#include "aworks.h"#include "aw_gpio.h"#include "aw_sem.h"#include "aw_vdebug.h"#include "aw_delay.h"#include "aw_int.h"
/**\brief 记录是否产生中断 */AW_SEMB_DECL_STATIC(__gpio_intr_semb);#define TRIGGER_FLAG AW_GPIO_TRIGGER_RISE
static void __test_gpio_trig_isr (void* arg){ int interrupt_pin = (int)arg;#if TRIGGER_FLAG == AW_GPIO_TRIGGER_LOW || TRIGGER_FLAG == AW_GPIO_TRIGGER_HIGH /* 关闭触发中断,避免电平触发时不停地进中断导致程序无法继续运行 */ aw_gpio_trigger_off(interrupt_pin);#endif AW_SEMB_GIVE(__gpio_intr_semb);}
void demo_interrupt_entry (int output_pin, int interrupt_pin){ aw_err_t err; int i; aw_kprintf("\ninterrupt demo testing...\r\n"); /* 信号量初始化 */ AW_SEMB_INIT(__gpio_intr_semb, AW_SEM_EMPTY, AW_SEM_Q_FIFO); /* 连接中断回调函数 */ err = aw_gpio_trigger_connect(interrupt_pin, __test_gpio_trig_isr, (void *)interrupt_pin); if (err != AW_OK) { aw_kprintf("gpio trigger connect failed!\n"); return; } /* 配置为 TRIGGER_FLAG 对应方式触发 */ err = aw_gpio_trigger_cfg(interrupt_pin, TRIGGER_FLAG); if (err != AW_OK) { aw_kprintf("gpio trigger cfg failed!\n"); return; } /* 开启引脚的触发 */ err = aw_gpio_trigger_on(interrupt_pin); if (err != AW_OK) { aw_kprintf("gpio trigger on failed!\n"); return; } for (i = 0; i < 50; i++) { /* 设置输出管脚为低电平 */ aw_gpio_set(output_pin, 0); /* 等待中断触发 */ err = AW_SEMB_TAKE(__gpio_intr_semb, 1000); if (err == AW_OK) { aw_kprintf("enter gpio interrupt!\n"); }#if TRIGGER_FLAG == AW_GPIO_TRIGGER_LOW || TRIGGER_FLAG == AW_GPIO_TRIGGER_HIGH /* 打开在回调函数中关闭的触发中断 */ err = aw_gpio_trigger_on(interrupt_pin); if (err != AW_OK) { aw_kprintf("gpio trigger on failed!\n"); return; }#endif /* 设置输出管脚为高电平 */ aw_gpio_set(output_pin, 1); aw_mdelay(100); } /* 断开中断连接回调函数 */ aw_gpio_trigger_disconnect(interrupt_pin, __test_gpio_trig_isr, (void *)interrupt_pin); /* 关闭引脚的触发 */ aw_gpio_trigger_off(interrupt_pin); /* 终止信号量 */ AW_SEMB_TERMINATE(__gpio_intr_semb); aw_kprintf("interrupt demo exit...\r\n");}
在例程代码中通过aw_gpio_trigger_connect、aw_gpio_trigger_cfg、aw_gpio_trigger_on三个接口配置interrupt_pin引脚中断触发模式为AW_GPIO_TRIGGER_RISE、中断回调函数为__test_gpio_trig_isr并对中断进行使能,同时配置output_pin持续翻转作为中断源的提供引脚,当output_pin 输出满足例程的中断条件时,会触发中断进入__test_gpio_trig_isr函数释放__gpio_intr_semb信号量,在例程中获取信号量成功后并打印"enter gpio interrupt!"。
例程中默认使用中断例程输出信号引脚为PIN_PF08、中断测试引脚为PF09,但由于本文测试所使用开发板并未引出该组引脚,故使用开发板上丝印URX1(PIN_PE24)做信号输出引脚与UTX1(PIN_PE25)做中断引脚进行测试,需修改main.c文件中TEST_OUTPUT_PIN与TEST_INTERRUPT_PIN宏定义,修改后如下所示:
#define TEST_OUTPUT_PIN PIN_PE24#define TEST_INTERRUPT_PIN PIN_PE25
修改完成后,重新编译工程并下载固件至开发板中,将开发板丝印URX1与UTX1引脚短接,并使用串口工具连接至DUART接口,则可看到在上位机中打印下图信息,表明中断触发成功。
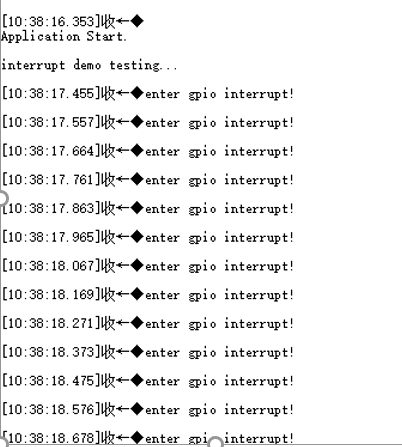
图2 串口打印信息注意事项:
- aw_gpio_trigger_connect函数所连接的回调函数是在中断中进行调用的,故该函数的实现需尽量的简短、高效,避免执行时间过长,否则可能会影响OS的实时性;
- 若中断触发条件为电平触发时,需在中断回调中关闭对应引脚中断,否则电平持续阶段会一直产生中断。
由于篇幅限制,样例中仅选取了部分特性进行讲解,在使用时需根据实际情况配置相应的触发条件以满足项目需求,更多引脚属性功能使用以及中断组合特性可自行调整测试。
本文对GPIO外设接口及样例做了详细介绍,当然其他外设也会陆续发布,请大家关注后续推文更新~
- 相关推荐
- 热点推荐
- GPIO
-
AWorksLP 样例详解(MR6750)——双核调试2023-09-23 1331
-
AWorksLP 样例详解(MR6750)——双核烧录2023-09-21 1441
-
【产品应用】AWorksLP例程介绍(MR6450)—— SD卡2023-05-10 1445
-
EPC6450-AWI工控板搭载MR6450核心板,强势来袭!2023-02-23 1809
-
【产品应用】AWorksLP 样例详解(MR6450)—— HWTimer2023-02-01 1375
-
【产品应用】AWorksLP 样例详解(MR6450)——PWM(单通道)2023-01-04 1146
-
【产品应用】AWorksLP 样例详解(MR6450)——UART2022-12-23 1460
-
【产品应用】AWorksLP样例详解(MR6450)-- GPIO2022-12-16 1342
-
【产品应用】AWorksLP SDK快速入门(MR6450)——开箱体验2022-12-09 1282
-
【深度解析】MR6450系列RISC-V核心板究竟有哪些过人之处?2022-12-05 1465
全部0条评论

快来发表一下你的评论吧 !
