

科聪移动机器人控制系统构建潜入顶升式AMR,助力轨道交通装备产业高速发展
描述
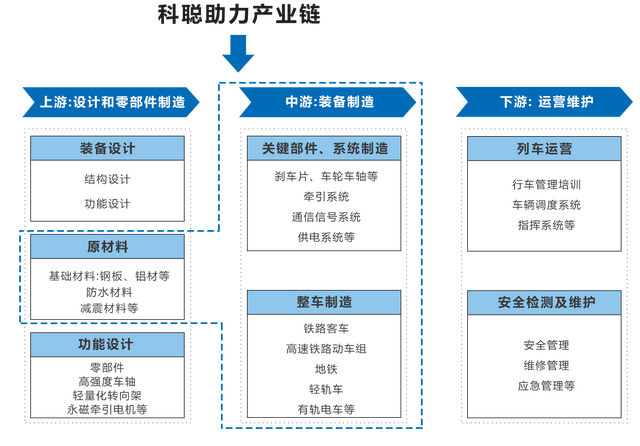
行业背景
随着中国轨道交通装备产业规模的不断扩大,发展模式正逐步向产业链协同发展转变,产业链的智能化能力将会成为阻碍其优化升级的关键因素。上游的原材料生产企业和中游的装备制造企业,面对生产效率提升的问题,越来越多的企业通过在生产中投入移动机器人来解决这一问题,实现货物分拣对接和自动无人化转运,实现入库库货车货物无人化搬运,实现智能物流的改造和升级。
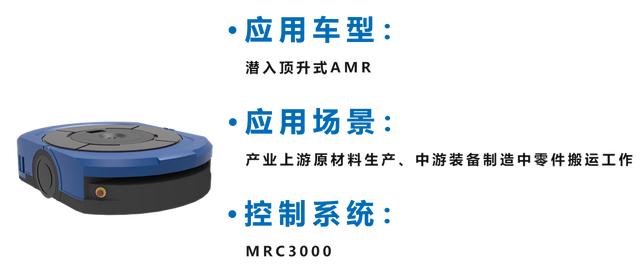
应用车型
车型解决方案→
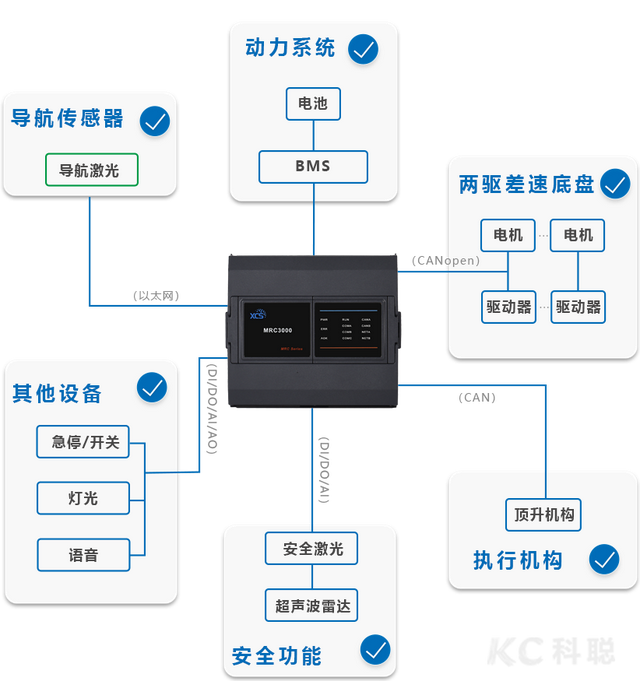
本车型控制核心→
此次应用为潜入顶升式AMR,结合投运现场,搭载科聪MRC3000导航控制器。

应用难点对策
当项目中AMR采用混合导航(激光自然导航+二维码导航)时:
难点①现场需要铺设大量二维码,人工铺设二维码存在误差,人工标定修正工作量大,内容枯燥
对策:科聪移动机器人控制系统具备导航自学习功能,根据多趟任务的执行情况,不断检测误差并自动进行补偿修正,省去了工程师繁复的调试和标定工作,同时保证了导航的灵活、稳定和准确。
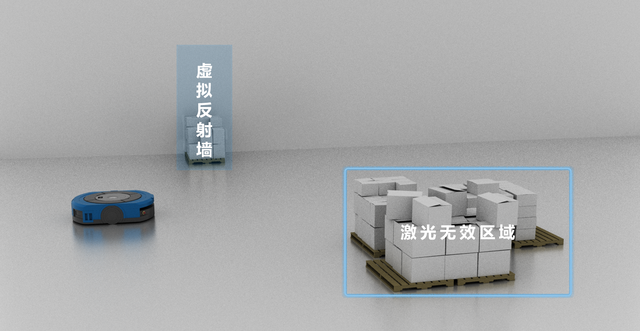
难点②激光自然导航对环境变化的耐受性较差,容易产生定位的偏差。
对策:科聪移动机器人控制系统拥有丰富的项目经历和应用经验,算法对无效定位环境进行过滤,保证移动机器人在激光自然导航时的准确定位和稳定导航。
科聪完善的整体解决方案可使项目在现场投用时,减少工程师实施工作量,保证导航的灵活、稳定和准确,实现物料的自动化转运和上下料。同时可提高轨道交通装备产业链上游和中游的生产效率,降低成本,助力数字化、智能化管理提升。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
浙江科聪完成A轮近亿元融资:持续领跑移动机器人控制系统市场2024-01-16 2032
-
科聪停车移动机器人整体解决方案!2023-11-30 1637
-
「浙江科聪新品发布」新品发布潜伏顶升式移动机器人专用控制器2023-11-21 4446
-
叉式移动机器人(AGV/AMR)整体解决方案2023-08-31 2880
-
「车型分析」移动机器人控制系统典型应用车型 ——叉式移动机器人(AGV/AMR)2023-06-05 2790
-
因为专注 所以专业 | 科聪移动机器人专用控制器重磅来袭2023-04-17 2006
-
控制系统典型应用车型 —— 潜入顶升式AMR2023-03-30 1545
-
复合移动机器人(AGV/AMR),如何快速构建?2022-03-28 2587
-
科聪智能移动机器人自主导航控制器MRC5000系列介绍2021-01-27 13158
-
如何实现移动机器人的设计?2020-11-23 3297
-
上海工博会正式发布了业内首份自主移动机器人AMR产业发展蓝皮书2020-09-25 3487
-
一种小型移动机器人的控制系统研究2012-08-20 3352
-
PLC的浆液下移动机器人控制系统2010-04-21 983
全部0条评论

快来发表一下你的评论吧 !
