

关于GNSS技术的这些事,你了解吗?(二)
描述
在上期文章中,我们介绍了GNSS技术的发展历程、原理,并对不同类型的定位技术进行了介绍,在本期文章中我们将继续讨论GNSS的优点与应用及其测试方法和解决方案。
GNSS的优点与应用
目前GNSS技术已经成为日常生活不可或缺的一部分,几乎覆盖各行各业,包括军事、农业、交通等。简单来讲,它的应用可以分成:
- 定位与导航:良好的GNSS地理定位服务的准确性、完整性、连续性和可用性为地理定位与导航带来越来越便捷、高效、准确的性能,在交通领域的使用实现增长和多样化,可应用于道路交通与铁路、智能与自动驾驶,航空航天,海运与物流等。
- 授时:GNSS技术在该领域具有巨大突破,降低了专用物理通道搭建成本,实施简单,并且有着令人满意的精度,GNSS信号已成为网络运营商传播公共时间源的重要、全球化和标准化手段。
- 追踪
- 制图
而在新应用领域,随着智慧城市与自动驾驶等新兴技术的不断发展,对高精度卫星导航定位服务的需求逐渐提升,卫星导航应用市场也将随之进一步扩大。
GNSS测试方法
GNSS终端数量正在急剧上升,应用领域与种类也越来越多,随之而来的问题就是测试场景越发庞大与复杂。近些年来,针对汽车与相关行业提出了HIL(硬件在环仿真)测试方法,并慢慢嵌入到整车测试系统中去,与其他功能、设备等完成协调测试。
GNSS测试的手段中目前主流的测试方法有三种:
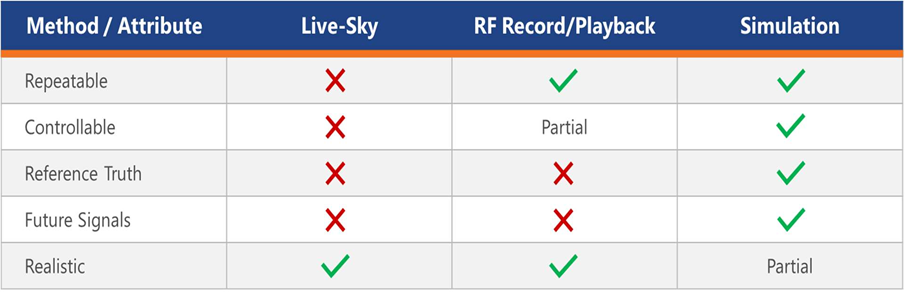
借助真实环境(Live Sky)
这是最原始也是最简单的测试方法,利用真实环境中的GNSS信号直接进行设备测试,只需具备待测设备和天线即可完成。测试的信号是最真实的,但同时也存在很多问题。
首先,GNSS信号很微弱,在室内近乎于无,因此如果想在室内测试则需要很麻烦的布线与连接,并且也很难在室内进行移动测试;其次,真实天空中的GNSS信号的时间也是真实的,这也意味着每一时刻的测试结果是唯一的,很难进行重现与还原,这对于测试本身来讲就存在着无法控制、无法复现、无现重复批量测试的问题。另外,此类方法也无法去测试和模拟一些理论开发中的GNSS信号与系统。
录制GNSS信号并回放(RF Rocord/Playback)
录制回放是对真实环境测试的一种进步与加强,将GNSS信号在真实环境中录制之后即可通过专门的设备重复回放,并针对信号的强度做一定的调节。因此在一次外场测试后,其他时候都可以在室内通过回放的方式来完成测试,既保证了信号的真实性,又给予了信号测试的重复性与部分可调性。
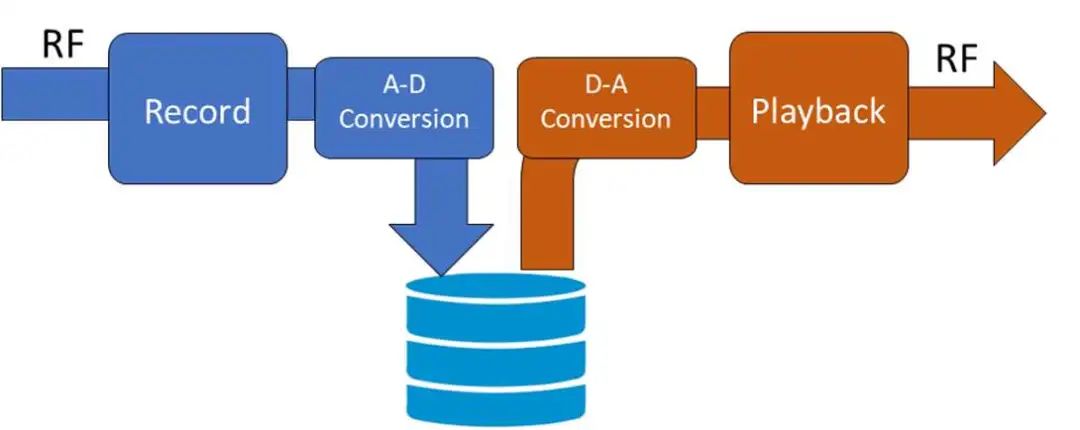
RF录制回放提供了可重复的测试,但在测试接收机方面用处有限。它本身不允许动态修改场景,也无法进行时间与位置的变化,缺乏灵活性。此外,录制回放经过AD/DA转换,受限于硬件性能,精度较差,通常只有真实模拟的25%,而且受录制接收器的限制,需要大量内存(GBs量级乃至TB),以及超高性能的配套PC。
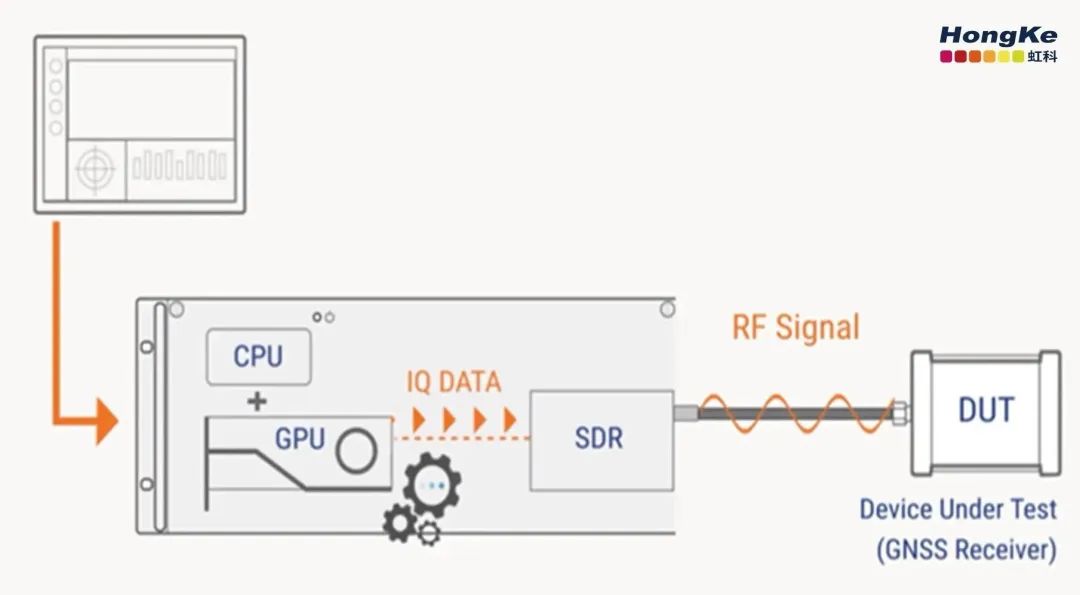
借助软件或硬件完成GNSS信号仿真与测试(Simulation)
GNSS仿真是目前最为先进的GNSS信号测试方法,它通过软件或硬件直接仿真所需的GNSS信号,近乎实时与无损的传输最真实的GNSS信号,相比前两种方式,它的实现不依赖真实天空信号,而是星历与修正计算完成信号的输出。因此这种方法具备非常明显的优势,测试信号可以自由编辑与修改时间、地点、信号强度等信息,无需在室外按照实际路径驱车或行走录制,并且可以重复测试。此外,它也可以根据相应的文件直接生成RF信号,无需依托现有星座架构,对于未来信号的研发和测试有非常大的优势。
GNSS仿真的方式因为是依托设备仿真而实现的,所以精度更高,延迟更小,并且完全不需要室外的测试与录制,大大的降低了外场测试的难度与风险。
GNSS测试场景与解决方案
目前GNSS测试一方面主要是各类接收机本身的测试项目会用到,例如定位时间测试、捕获时间测试、接收机灵敏度测试、触发精度测试等。这类测试结构简单,实现容易。
此外,伴随着自动驾驶与相关行业的发展,针对高精度定位的测试也逐渐增多,包括V2X、车辆导航、车内娱乐系统测试等,这部分测试大部分都需要在真实环境中联调测试,无法进行单个模块的性能测试,因此HIL(hardware in loop)硬件在环仿真测试方法逐渐成为主流,而这也对测试的需求、架构、精度等提出了更高的要求。
在GNSS仿真的现有优势上,此类基于SDA(软件定义架构)的仿真方案具有独特的优势,这在HIL测试中则体现的更加明显。
提供对HIL测试的高度集成性与开放性
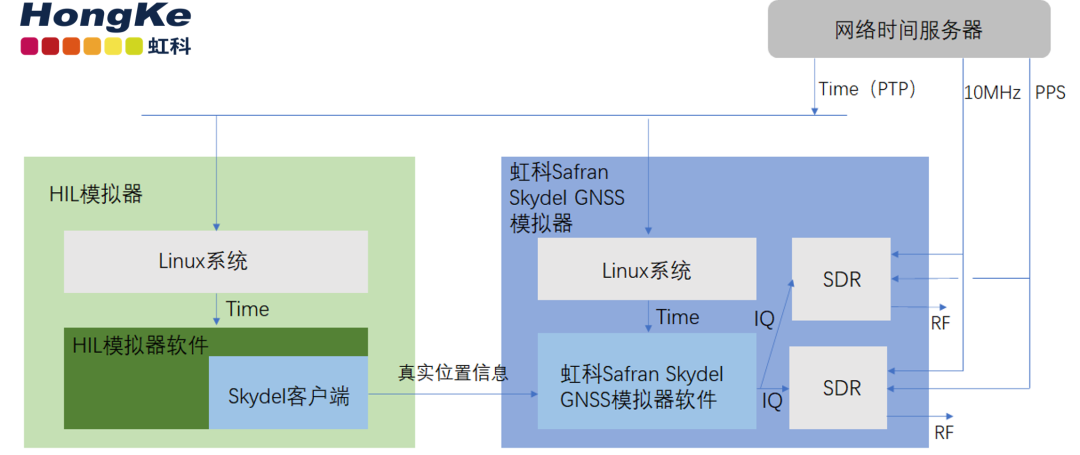
软件是基于SDA的GNSS模拟器的基石与支柱,对外的连接与接口都可以针对软件来完成。以虹科Safran Skydel仿真引擎为例,它是基于Linux开发的,支持Python、C#、C++、Labview等多种语言,用户可以直接通过编程的方式对设备进行控制与连接,大大提高了HIL系统的构建效率与紧密性。
此外Skydel支持外部控件API,可以在HIL模拟器的前端直接调用Skydel,实现HIL系统一体化。
极低的延迟与可视化的调教系统
HIL(Hardware-in-the-Loop)硬件在环仿真测试系统是采用实时处理器运行仿真模型来模拟受控对象(如:汽车、航空飞机等设备)的运行状态,以此判断在自动驾驶的HIL测试中电控模块的性能。想使用GNSS模拟器测试汽车运行是否正常,就需要把自动驾驶仪的信息返回到GNSS模拟器中,再进行下一个轨迹的模拟。
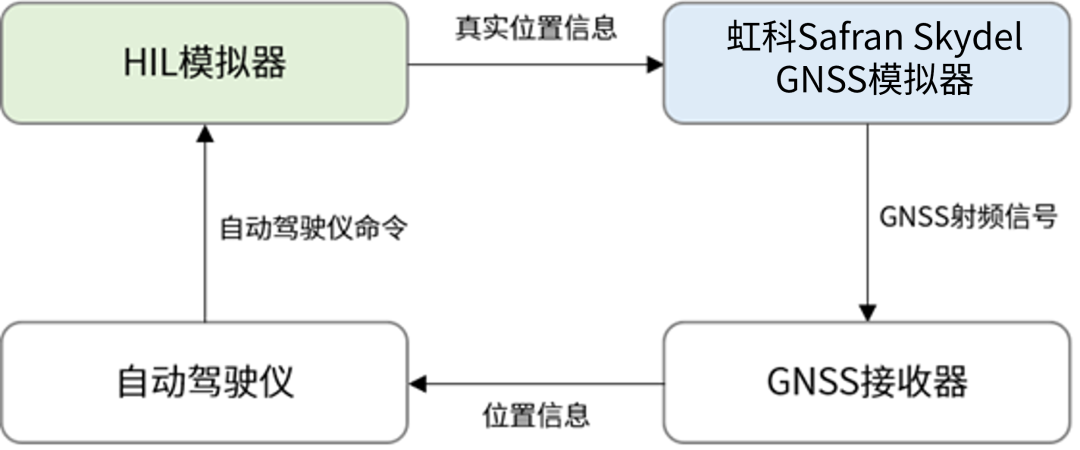
而目前测试标准与应用场景来看,HIL测试对于实时性有极高的要求,尤其是对于汽车、飞机、航空航天器等高安全要求、高显示成本、低容错乃至零容错的应用,实时性是不可或缺的保障。
虹科Safran GNSS模拟器具有其软件定义架构的特点,基于Linux开发的Skydel软件可以作为硬件部分的大脑与心脏,将处理压力与信号仿真压力转移到软件与平台上,极大的提高真实轨迹位置的数据处理与GNSS RF信号的输出能力,在大型场景的通信仿真场景下,延迟可控且极低。
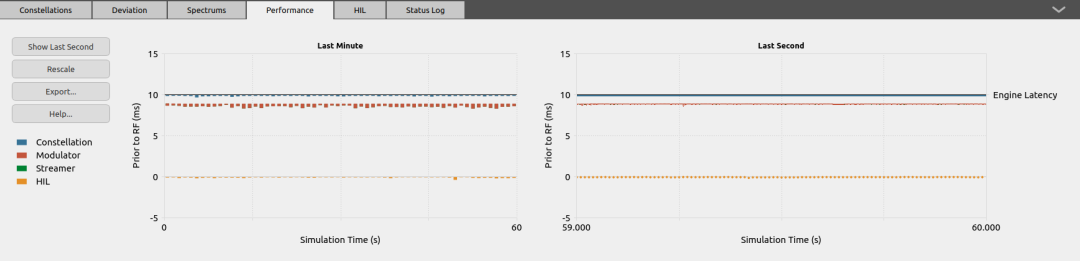
虹科Safran GNSS模拟器的SDA架构产品系列中的GSG7/8的延迟可以达到10ms,经过系统调试与调节,最低甚至可以达到5ms,这是目前业界公布的最低也是最真实的延迟!相对于上一代产品的130ms,虹科Safran GSG7/8可以说真正使得HIL测试达到“近乎实时”的效果。
另外,它内置了延迟调教与可视化的GUI界面,不仅方便用户真实观测延迟并通过调整系统参数降低延迟,也提供对外的开放接口,允许客户在HIL整套系统的层面进行观测与优化:
强大的功能与参数
GNSS模拟器归根结底是一种设备或系统,它是为了替代或补充真实环境测试的一种工具。因此一方面要保证真实,另一方面要有强大的性能去支持高度复杂与全面的仿真过程。
- 虹科Safran GNSS模拟器支持多个实例同时仿真,实现大型车队或复杂多单元场景的仿真效果,实现双天线姿态校正、RTK场景模拟、车辆碰撞测试、航空航天器实时对接与姿态修正等场景;
- 支持1000Hz的信号迭代率,目前大多数的仿真设备都是10Hz的迭代率,而更高的迭代率意味着可以带来更高速场景与更高精度的仿真,这对于高精度与高速场景十分重要;
- 在真实环境中,有很多个星座与卫星共存,以手机GNSS接收功能来看,室外随时都可以捕获到几十颗卫星!而这仅仅只是一个接收机。在大型仿真的项目中,存在多个接收机,可能需要上百颗卫星同时进行模拟。考虑到这一场景,基于软件定义结构的虹科Safran GNSS模拟器具有更为明显的优势,可模拟的星座与搜星数量不会受限,只需要添加相应数量的GPU与SDR即可;
- 除此之外,基于软件定义架构的虹科Safran GNSS模拟器对于时钟同步精度和数据格式的丰富度都有着强大的支持。
基于这样的强有力设备,虹科Safran GNSS模拟器针对自动驾驶、V2X等场景均构建了不同的驾驶方案,与多个知名测试厂商合作搭建了多种方案,例如:基于GNSS的自动驾驶功能 HIL测试系统、基于ITS频段PC5接口的V2V和V2I通信测试系统、集成网联汽车车队管理系统测试方案、用于飞行模拟和飞行员培训的HIL测试系统等。
基于GNSS模拟器仿真的测试手段随着自动驾驶等高精度定位业务的铺开,目前已经逐渐成为此类测试的主流方法之一,无论是对于传统汽车企业、新能源汽车企业,还是测试行业的企业来说,这都是进行GNSS测试的高性能方案。
参考:
① 北斗卫星导航系统网站
② First-TF:What is GNSS?
③ Fibocom:一文读懂GNSS(全球导航卫星系统)
④ HEXAGON:What are Global Navigation Satellite Systems?
-
FHT4644国产替代必然性崛起你还不来了解一下芯片这些事吗2024-06-24 13052
-
GNSS测试行业理论知识助您深入了解GNSS技术的核心知识,掌握最先进的测试方法 #GNSS模拟 #GNSS虹科卫星与无线电通信 2024-08-23
-
关于域名的这些常识你了解吗2019-01-17 4687
-
揭秘GNSS实验室2019-09-23 3057
-
有关3D打印的这些术语你都了解吗?2021-05-20 1998
-
SAW和BAW滤波器你需要了解这些2021-05-24 4011
-
CCD与CMOS技术,这些是你所不了解的2021-06-01 1638
-
STVD、 STVP、 ST-LINK utility这些工具你了解吗?2020-03-04 10742
-
什么是eMTC?关于eMTC技术,你了解多少?资料下载2021-04-09 1602
-
关于MIMO技术您应该知道的10件事2021-06-16 1120
-
关于隔离器件,你需要知道的三件事2022-10-28 919
-
这些预测性维护的专业术语你都了解吗?2023-01-31 1908
-
关于GNSS技术的这些事,你了解吗?(一)2023-04-10 10696
-
GNSS技术知识你知道多少?这些你或许还未掌握2023-07-31 3923
-
科普|关于GPS和GNSS,你了解多少?2025-06-28 3624
全部0条评论

快来发表一下你的评论吧 !
