

无人机视觉跟踪系统解决方案-米尔基于XCZU3EG/XCZU4EV/XCZU5EV核心板
描述
近些年来,随着自动控制领域的发展,摄像镜头的工艺和视觉识别算法越来越完善,基于这一基础,无人机视觉跟踪技术成为炙手可热的研究领域。什么是无人机视觉跟踪技术呢?首先无人机通过摄像头进行视频采集,对采集的信息进行存储,并通过算法识别设定的跟踪目标,执行预设任务。目前无人机视觉跟踪技术已经广泛运用在农业生产,军事科研,物流运输等领域。
在农业生产领域,无人机视觉追踪系统运用在识别农作物的生长情况中,进行高空灌溉、驱赶害虫等自动化农业管理;在民用领域,无人机通常使用视觉跟踪系统识别人体手势,让用户通过手势操控无人机的升降和摆动;在生物调研领域,该技术更多是为了追踪记录野生濒危动物的生活习惯,维护生态系统平衡。
无人机跟踪系统是如何组成的呢?首先,无人机通过高清摄像头模块,实时采集图像数据,系统通过信号检测模块和图像预处理模块将图片信息转变成数字信息,然后通过数据采集与处理模块进行采样、量化,并对各图片参数进行分析过滤;将分析结果与设定的跟踪目标比较,进行图像识别跟踪;跟踪的图像信息可以通过网络传输到手机和电脑实时显示。
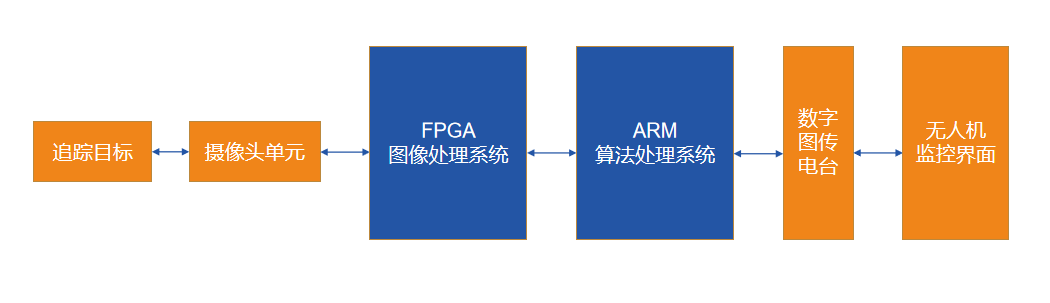 无人机视觉跟踪流程图
无人机视觉跟踪流程图
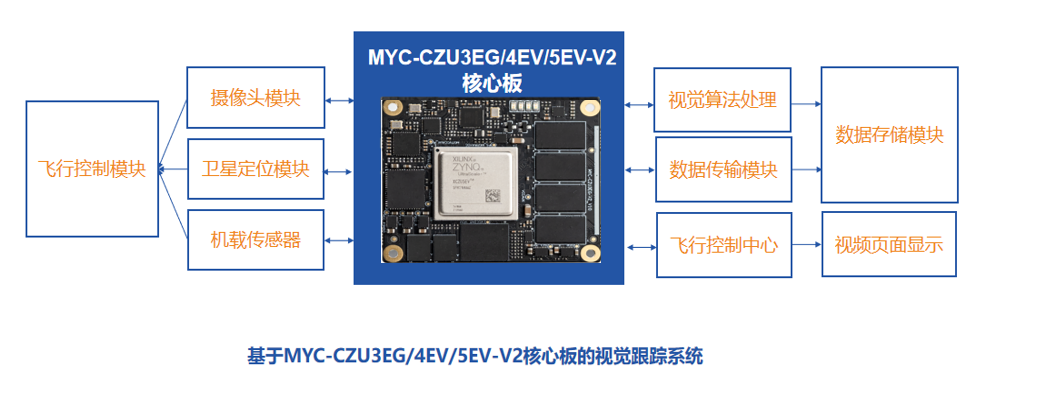
基于米尔电子MYC-CZU4EV/5EV-V2核心板设计的无人机视觉跟踪系统,可以分为图像信号采集、数据处理、信息展示三部分;图像采集主要通过摄像头收集图像信息,再由FPGA芯片高速采集将图片信息传输到数据处理单元,数据处理单元由VCU和MCU组成,负责将采集的图像数据通过算法把设定好的跟踪目标进行标注处理;而信息展示部分,则通过无线传输系统把信息同步显示到无人机控制平台和APP上面,实现实时视频传输,掌握远程定位追踪功能。
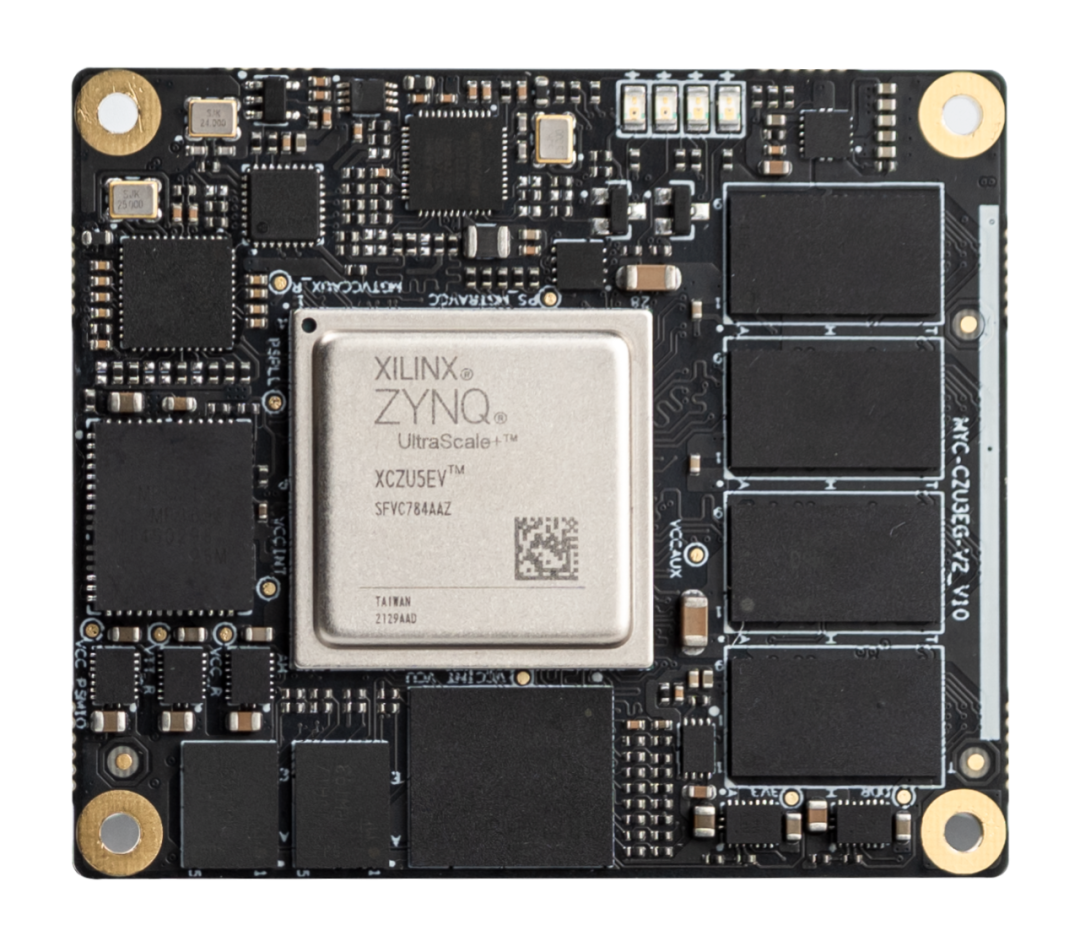
MYC-CZU3EG/4EV/5EV-V2核心板,搭载功能全面的高规格Zynq UltraScale+ MPSoC芯片,其中芯片的PS端集成了APU ARM Cortex-A53处理器,RPU Cortex-R5处理器,频率高达667MHz的Arm Mali-400 MP2(GPU)。需要注意的是,4EV/5EV芯片比3EG芯片多了一个视频编解码器单元 (VCU),支持H.264/H.265编解码。芯片搭载内部存储器,外部存储器接口(DDR)和外设接口。这些外设接口主要包括USB总线接口,以太网接口,SD/eMMC接口,I2C总线接口,CAN总线接口,UART接口,GPIO等。高速接口如 PCIE,SATA,Display Port。
核心板图片:
板卡资料:
机械参数
类型
| 分类
| 参数
|
工作温度
| 工业级
| -40℃~+85℃
|
商业级
| 0°C~+70°C
| |
环境温度
| -50℃~100°C
| |
工作湿度
| 非冷凝
| 20%~90%
|
冷凝
| 不支持
| |
电源供电
| 核心板
| 3.3V/5A
|
核心板接口
| PCB连接器
| 2个160 Pin 0.5mm间距双排高速高密度PCB连接器
|
PCB规格 | 核心板
| 12层盲埋孔,沉金工艺生产,独立的接地信号参考层,无铅
|
机械尺寸
| 核心板
| 60.0mmx52.0mm,板厚1.6mm,核心板模块整体厚度约为8.25mm
|
底板资源
序号
| 资源种类
| |||
PS 单元
| 1
| 1 路千兆以太网
| ||
2
| 1路USB3.0typeC接口
| |||
3
| 1路Display Port接口
| |||
4
| 1路PCIE 2.1x1接口
| |||
5
| 1路SATA 3.1接口
| |||
6
| 1路CAN接口
| |||
7
| 1路RS232串口
| |||
8
| 1路TF卡接口
| |||
9
| 1路I2C接口
| |||
10
| 1个复位按键,2个用户按键
| |||
11
| 1路JTAG
| |||
12
| 内置实时时钟
| |||
序号
| 资源种类
| |||
PL 单元
| 1
| XADC接口
| ||
2
| 1路Xilinx标准LPFMC接口
| |||
3
| 1路HDMI接口,RGB 24bit,不支持音频
| |||
4
| 1路LCD DIP/LPC接口,RGB 24bit,与HDMI复用显示信号
| |||
5
| 电阻式电容式触摸屏接口,集成在LCD触摸屏接口
| |||
6
| 2路PMoD
| |||
7
| 5个电源指示灯
| |||
8
| 4路SFP+模块接口(注:仅4EV/5EV使用)
| |||
9
| 1路Arduino接口
| |||
-
为什么医用内窥镜和直播设备都选它?拆解Xilinx XCZU7EV的爆款密码2026-07-02 371
-
光纤图像处理卡设计原理图:520-基于ZU15EG 适配AWR2243的雷达验证底板 XCZU15EG架构高速信号处理板2025-08-28 965
-
图像信号分析处理卡设计原理图:536-基于FMC接口的XCZU7EV 通用PCIe卡 视觉处理卡 工业控制卡2025-07-08 1615
-
请问有XCZU9CG-FFVC900的原理图库吗?2024-04-01 4354
-
基于XCZU3EG/XCZU4EV/XCZU5EV核心板的无人机视觉跟踪系统解决方案2023-07-10 1883
-
XCZU4EG-L2FBVB900E系统SOC芯片2021-04-26 1884
-
XCZU15EG板卡学习资料第524篇:基于XCZU15EG的FMC+ 高性能通用信号处理板卡2020-12-14 3725
-
米尔FZ3深度学习计算卡免费试用2020-10-09 1357
-
米尔MYD-CZU3EG搭载Xilinx DPU,具备强大AI计算能力,你怎么看米尔这款产品?2020-09-27 2135
-
米尔科技开发笔记简介2019-11-26 3373
-
XCZU3EG开发笔记之gpio_emio2019-09-03 5412
-
米尔发布新品Zynq UltraScale+ MPSoC核心板2019-05-24 4810
全部0条评论

快来发表一下你的评论吧 !
