

无线射频模块RF4463F30应用:智能遥控钓鱼打窝船
描述
无线射频模块RF4463F30在智能遥控钓鱼打窝船的应用介绍
智能遥控钓鱼打窝船装配有电子罗盘,GPS卫星定位系统,声纳式鱼探仪,全数字双向无线通信系统:内置无线射频模块RF4463F30。钓鱼无线遥控打窝船的作用主要是探鱼,载料定点打窝,投放饵料和鱼钩。
在启动打窝船后,首先要获取打窝船的起始位置,而初次获取位置信息需要一定时间,可选择手动开启定位功能,或设置打窝船启动后自动获取位置信息。打窝船启动后自动获取起始位置需要一定时间,可通过遥控器操作打窝船在岸边移动预设距离,例如10米,进而通过定位模块获取起始位置。或者通过遥控器控制打窝船在岸边移动预设时间,例如10秒,进而通过定位模块获取起始位置。起始位置为坐标信息,获取起始位置后将起始位置数据存储在打窝船和遥控器上,供后续操作使用。然后将起始位置数据通过无线射频模块RF4463PRO发送至服务器。
用遥控器启动探鱼功能,观察显示屏,选好打窝点,行驶至目标位置后,并记录目标位置。打窝船内置无线射频模块RF4463F30,将起始位置和目标位置的数据发送至服务器,服务器上预存地图信息和对应算法,使用预设算法处理这两个点得到规划路线,并将规划路线发送至打窝船和遥控器,打窝船沿规划路线从目标位置移动至起始位置。可设置多个目标位置,设置为定点1、定点2,定点3等等。
打窝船装上鱼钩或饵料后自动巡航至目标位置自动打窝,自动放下鱼钩或饵料;打窝船获取起始位置,从目标位置自动返回至起始位置。在初次打窝确定起始位置和目标位置后,打窝船便可自动往返于起始位置和目标位置之间。
无线射频模块RF4463F30在智能遥控钓鱼打窝船的应用优势
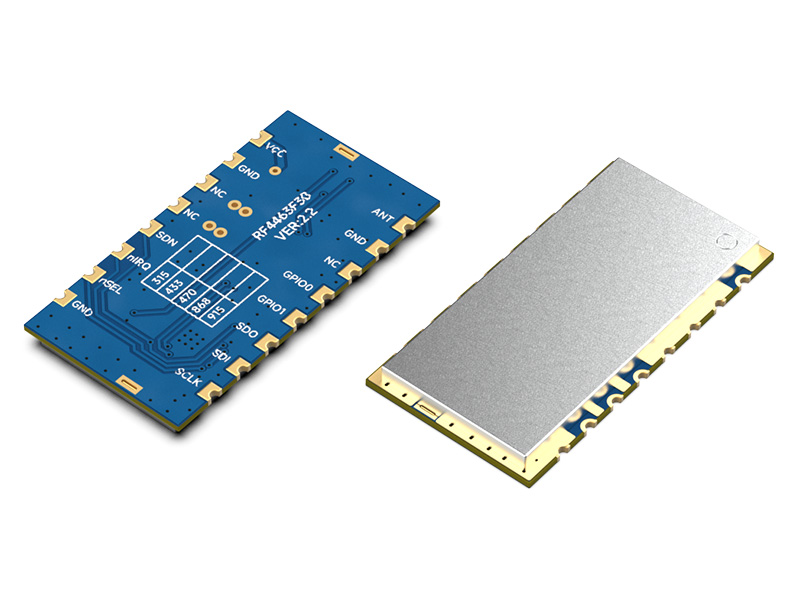
- RF4463F30无线射频模块采用的是Silicon Lab si4463器件,这是一款高度集成的无线ISM频段收发芯片;
- 支持315/433/490/868/915MHz各种频段(可定制142-1050MHz),满足多种应用需要;
- 接收灵敏度(-126dBm),1W的输出功率;
- 传输距离:3公里;
- 支持低电能检测,定时唤醒功能、跳频功能,内置晶体调整功能,内部集成稳压器。
以上就是无线射频模块RF4463F30在智能遥控钓鱼打窝船的应用和优势的总结和分享。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
利尔达LSD4RF - 2F717N30模块:物联网无线通信的理想之选2026-06-02 298
-
SI4463TR4 - GC 无线模块:特性、应用与设计要点2026-05-09 441
-
2.4G钓鱼打窝船解决方案,2.4G SOC芯片XL2417D,通信距离可达300M2026-01-19 675
-
思为无线 RF4463PRO无线收发模块技术解析:性能、合规性与集成2025-09-23 3592
-
钓鱼打窝船总掉链?仁懋 TOLL 封装 “芯” 方案2025-08-29 1571
-
RF遥控是否属于无线射频呢?2023-12-29 2754
-
无线射频模块RF4463Pro应用:燃气表抄表系统2023-03-06 2491
-
简单介绍下RF射频遥控遥控协议2022-02-24 3222
-
超外差ASK\RF433m、RF315m射频遥控模块解码教程,无线遥控器、电动窗帘遥控、RF遥控器电平信号、协议分析2022-01-12 2964
-
RF433和RF315无线模块的软件编解码遥控程序免费下载2020-12-25 2996
-
无线模块的电路图和引脚定义2018-12-19 5218
-
基于SI4463射频芯片的无线数据采集模块2017-11-08 1907
-
无线射频技术在智能家居的应用2014-11-21 6237
-
nRFready™2.4GHz 射频智能遥控器参考设计2012-03-24 4392
全部0条评论

快来发表一下你的评论吧 !
