

EtherCAT FP介绍系列文章—多网段
描述
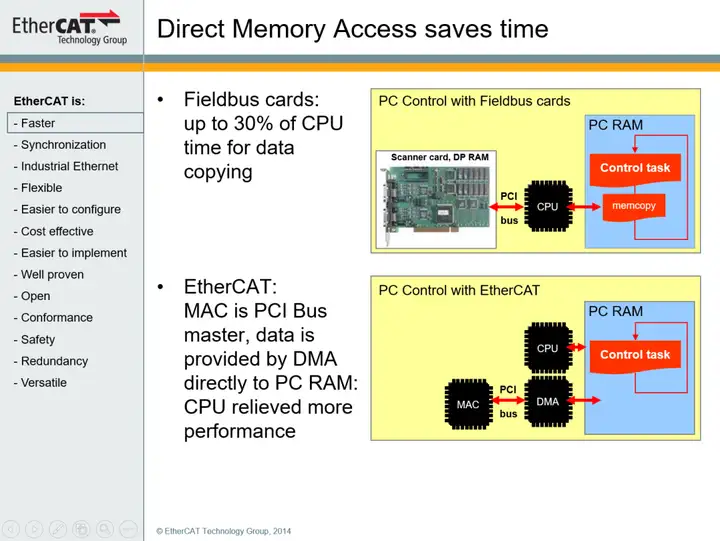
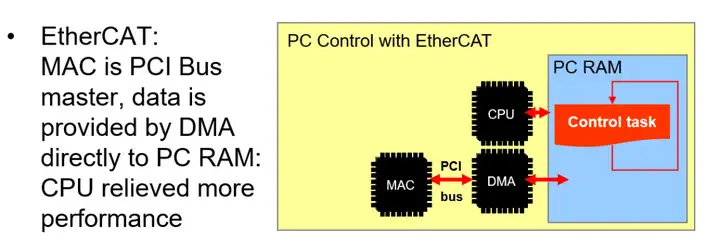
EtherCAT(Ethernet for Control Automation Technology)是一种基于以太网的开发构架的实时工业现场总线通讯协议,EtherCAT是最快的工业以太网技术之一,同时它提供纳秒级精确同步。相对于设置了相同循环时间的其他总线系统,EtherCAT系统结构通常能减少25%-30%的CPU负载,EtherCAT的出现为系统的实时性能和拓扑的灵活性树立了新的标准。
根据ETG推荐基于PC控制的EtherCAT为了能够达到规范标称的性能,应保证EtherCAT主站和控制任务集成在同一程序下,以便控制程序、通讯协议栈和MAC设备的DMA可以被同一程序统一管理。这样能够保证应用程序和传递到总线上的数据同步刷新,减少了各个环境时间的数据传输和同步的损耗。
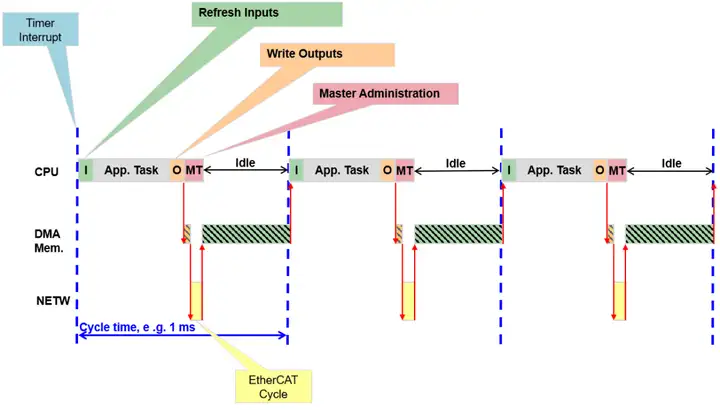
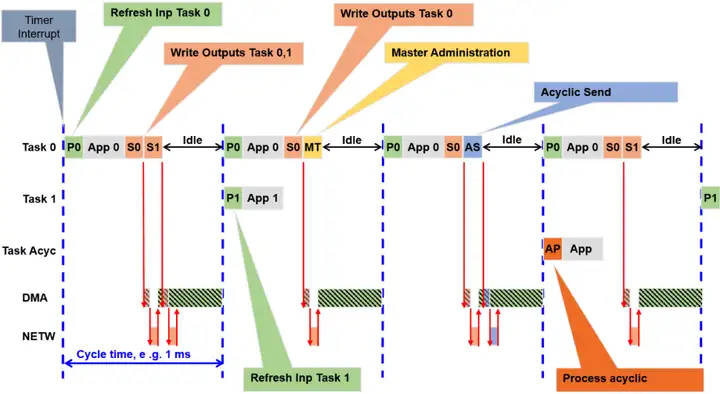
Acontis EC-Master EtherCAT主站的总线时序图
Acontis凭借大量的EtherCAT客户现场应用经验和客户实地测试,根据EtherCAT原理和客户实际需要,在acontis EtherCAT主站方案EC-Master中进行了深度程序结构优化,使EC-Master EtherCAT主站最大限度接近ETG推荐的(如下图)EtherCAT程序合理结构。
优化后的实际应用逻辑中,客户根据产品的性能要求确定总线循环周期Cycle Time的时间长短。在每个循环周期内,EtherCAT主站的CPU必须完成下列几项任务:已接收数据帧的处理、客户应用处理、发送数据和主站协议站管理,非周期数据的处理在每个循环周期中可选,如下面总线时序示意图所示。
EtherCAT在能够满足快速周期通讯,官方统计数据下当网络由100个伺服轴组成(每个伺服轴由8个input+output)时,传输时间约为100us。但是这也存在一些问题,上述网络环境下如果希望保证1ms循环周期的基础上,不断增大应用程序执行时间和网络数据负载时,会导致主控系统和网络负载压力过大,无法保证总线循环周期的可能。
所以acontis EC-Master EtherCAT主站考虑,在保持应用负载和传输数据量不变的情况下,能够提供两种解决方案以便减轻网络压力,进一步提高网络带宽的使用效率和可用性。
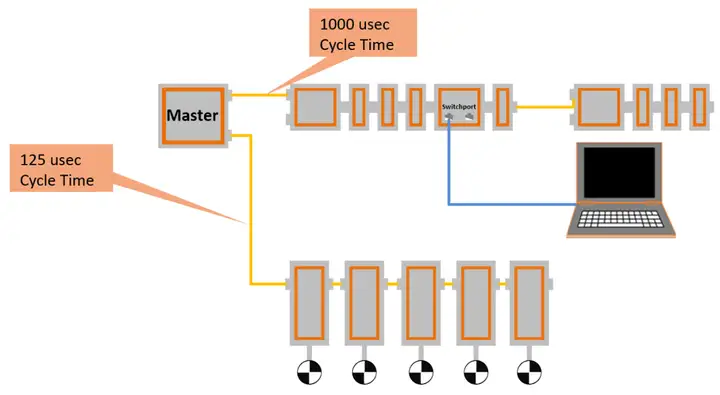
方案一:支持多网络
多网络方案允许在一个主站应用程序下实现多个独立的EtherCAT物理网络,每个网络之间的周期和分布时钟都是独立的互不干扰。可以将原本单个总线网络上的大量从站设备和数据拆分到几个网络中运行,以减小单个网络的最大负载。
• 使用场景:
在1个系统下控制大于1个EtherCAT网络,例如:
- 网卡1用于低速IO总线控制
- 网卡2用于高速运动控制
• 每条工作总线完全独立配置和操作
• 每条总线可以使用相同或者不同的网卡驱动,最多可以支持12条独立网络
方案二:分帧处理
在同一EtherCAT网络下不同类型的设备可能对总线循环周期有不同的需求,使用分帧处理扩展功能包,可以让不同周期的过程数据独立发送,减少单一循环周期下的网络带宽占用。
• I/O过程数据分割到多个不同的应用任务中。
• 非同步通讯可以独立一个任务
- 相关推荐
- 热点推荐
- 以太网
- 通讯协议
- EtherCAT主站
- 工业现场总线
-
不同网段PLC通过NAT网关实现跨网段访问2026-04-28 440
-
如何实现不同品牌多网段PLC数据通讯2025-05-06 1611
-
网段隔离器实现多网段PLC数据通信2025-04-18 1361
-
EtherCAT FP介绍系列文章—UDP gateway2024-02-23 1682
-
智能工厂多网段设备如何实现NAT转换和跨网段访问2024-01-18 1591
-
EtherCAT FP介绍系列文章—热插拔2024-01-04 2351
-
EtherCAT FP介绍系列文章—SuperSet ENI2023-12-06 1476
-
EtherCAT FP介绍系列文章—EoE2023-06-16 3210
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 2036
-
EtherCAT FP介绍系列文章—线缆冗余2023-04-14 2769
-
EtherCAT FP介绍系列文章--概述2023-04-10 1762
-
AMIC110 ETHERCAT slave DEMO介绍2022-11-07 829
-
EtherCAT相关资料下载2021-07-02 2267
-
EtherCAT-技术介绍2016-08-17 7755
全部0条评论

快来发表一下你的评论吧 !
