

机械式激光雷达结构设计 激光雷达的工作原理
MEMS/传感技术
描述
做这个项目最大的收获是真正进入设计领域,特别是写硬件设计说明的时候,将每个设计思路写出来以后对原理的理解更深入,并且这样出错的概率低了。
激光雷达现在的应用可以说是非常广泛,有幸做了一个TOF激光雷达项目,从最初的雷达小白到现在完成了一个激光雷达项目,踩过的坑挺多,为了自己能提升,现在对该项目进行总结,由于很多东西涉及到机密我会对一些敏感信息隐去,请谅解。
按照激光测距原理划分,激光雷达分为飞行时间( Time of Flight, ToF)及非飞行时间两类测距方式。
非飞行时间测距主要利用数学统计或者光子计数得到测量对象的距离数据信息,包括三角测距、干涉测距以及光子计数测距等。
对于飞行时间测距而言,由激光光束状态划分,又主要分为脉冲式激光测距和相位差异激光测距。这两种也是目前最常用的激光测距方式。其中,三角测量法适合测量待测目标表面的变化,然而其苛刻的应用条件限制了其应用范围。相位差异测量法具有很高的测量精度,然而搭载相位差异测量系统的装置实际应用中的实现较为困难、成本高、测量周期慢且需要待测目标辅助。
相比三角测量法及相位差异测量法,脉冲式激光测距以其测量精度高、测时范围宽、稳定性好、处理速度快和简单易用的优点在军事、航空航天等高精度测距领域大显身手,其中,用于军事的跟踪定位与侦察预警已是脉冲式激光测距最常见的应用领域。
精度时间间隔测量是脉冲激光测距系统中的关键技术之一。激光脉冲信号的上升时间、脉冲宽度、信噪比、传输延迟都对脉冲激光测距系统的测距精度有直接或间接影响,其中时间间隔的测量精度是激光测距的精度的瓶颈,且无论在短距离或长距离的测量中都尤显重要。
激光雷达工作原理:
激光雷达电路由发射板、接收板、电源板、显示板、主板组成。主控芯片:SOC,也就是ARM+FPGA,ZYNQ7000系列。TDC芯片使用的***。
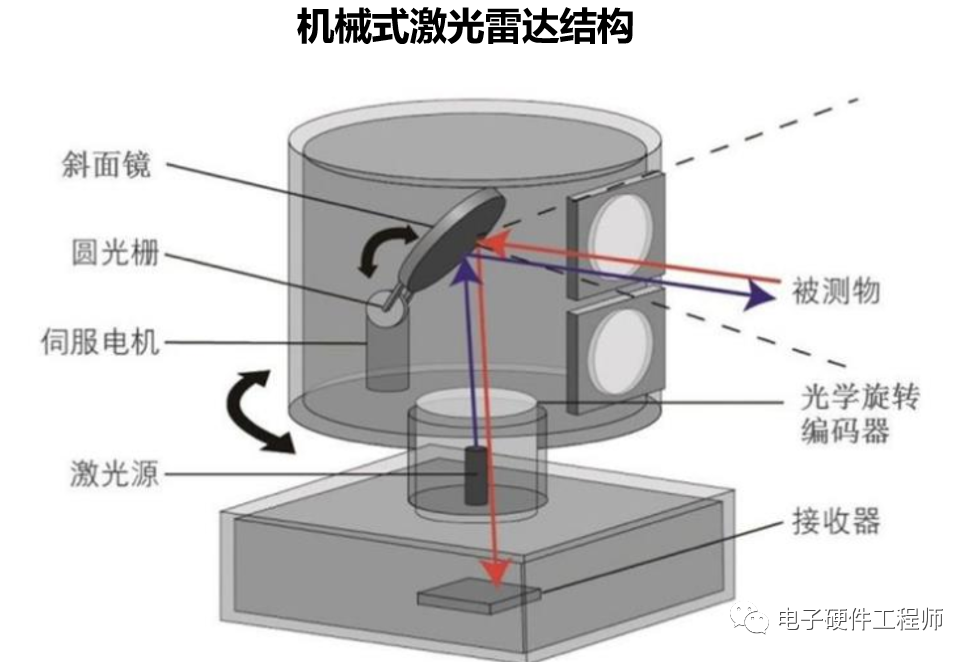
激光雷达结构如上图所示:转镜固定在无刷电机上,无刷电机带编码器。
发射头发射激光,打在转镜上。然后探测物体返回转镜,通过凸透镜聚焦到接收板上。通过接收电路返回到TDC。通过计算发射与接收之间的时间差来计算飞行时间。
现在对这个项目进行总结:(保密原因,只是记录)
编辑:黄飞
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5167
-
激光雷达分类以及应用2017-09-19 8718
-
常见激光雷达种类2017-09-25 13806
-
消费级激光雷达的起航2017-12-07 7291
-
固态设计激光雷达2018-01-25 8373
-
机器人和激光雷达都不可或缺2019-02-15 6064
-
TOF激光雷达2019-06-07 8980
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 20924
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5544
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 41496
-
激光雷达2021-01-17 19993
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30142
-
什么是激光雷达 不同技术路线的激光雷达的优势2023-02-21 5152
-
简述激光雷达的结构原理分类及特点 TIM320激光雷达的工作原理2023-08-22 4421
-
机械激光雷达的组成包括哪些?2023-08-23 3299
全部0条评论

快来发表一下你的评论吧 !
