

三菱PLC控制伺服马达步骤介绍
工业控制
1285人已加入
描述
本文以三菱PLC控制伺服马达为例,具体分享一下伺服马达控制步骤。
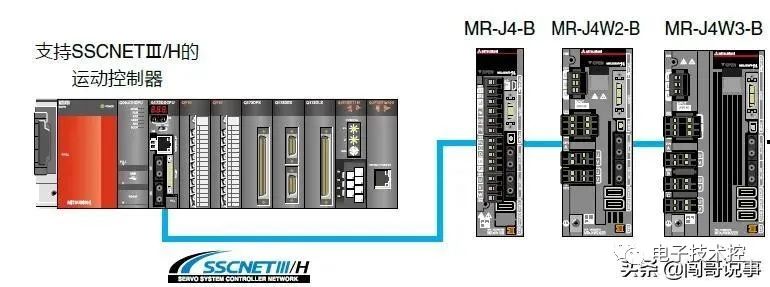
三菱伺服马达 1.设置定位模块基本参数 在智能功能模块中(QD77MS系列)根据机械配置不同设置好相应的参数
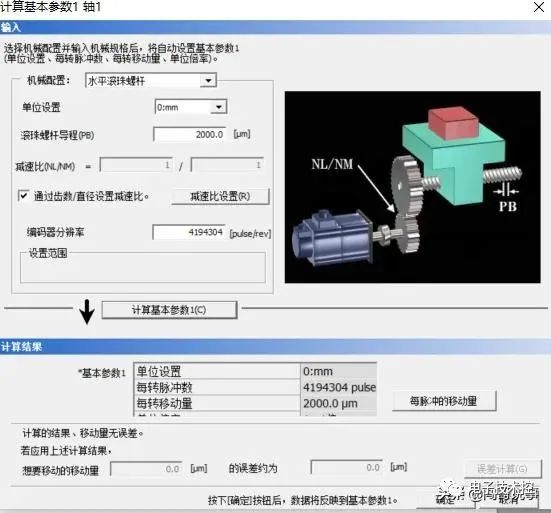
基本参数设置 2.设置原点回归基本参数 根据实际情况选择:近点DOG型、数据设定型、计数型等原点回归方式。

原点回归方式 3.设置伺服放大器参数 设置绝对位置系统、相对位置系统、自动调谐相应等参数,也可以选择“一键式调整”进行相关的参数设置。
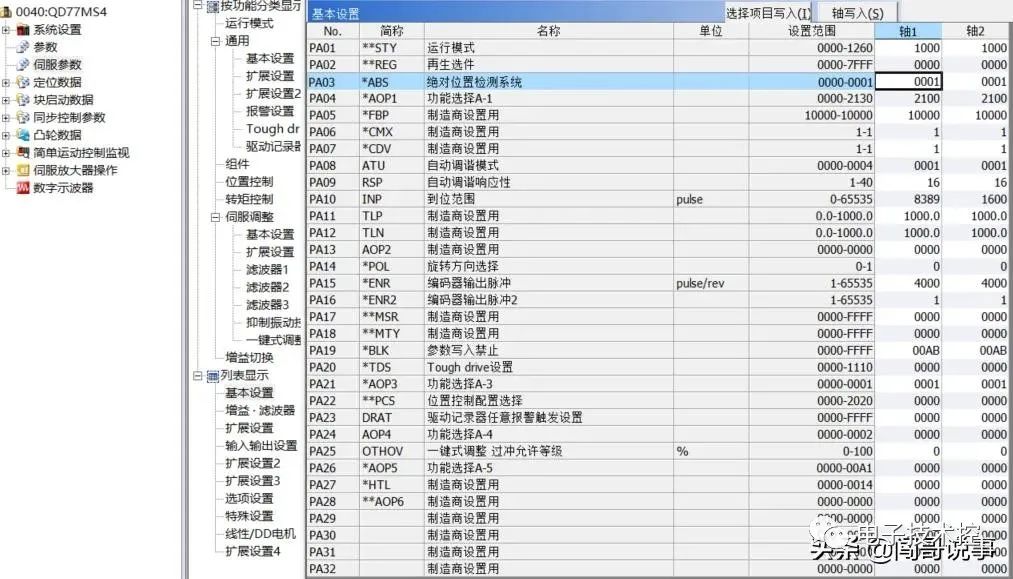
伺服放大器参数设置 4.伺服外部信号程序 包含伺服马达电源信号、伺服马达刹车信号等外围接入信号。
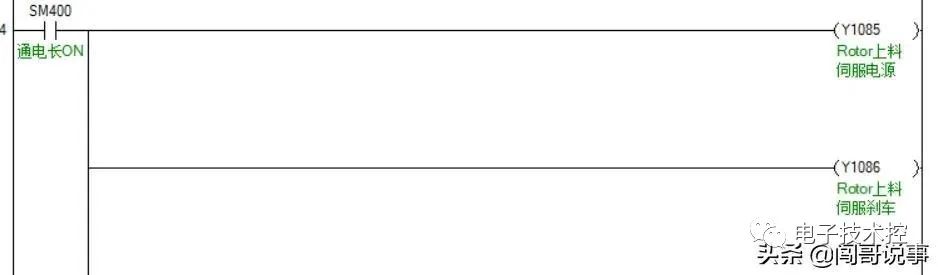
外部信号程序 5.原点回归程序 根据不同的原点回归方式,进行原点回归。
原点回归程序 6.手动程序 JOG+、JOG-、伺服停止、伺服报警复位等与PLC CPU 输入/输出信号。
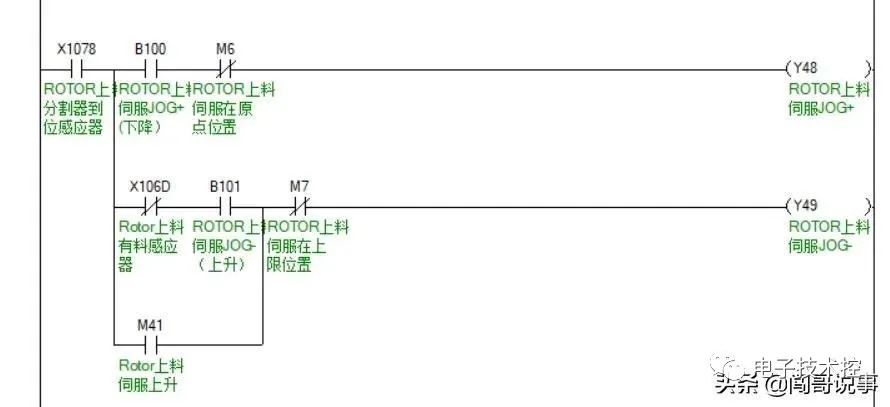
手动程序 7.当前参数反馈&控制参数写入程序 ①.反馈参数: 伺服马达的当前位置、报警代码、当前速度等。
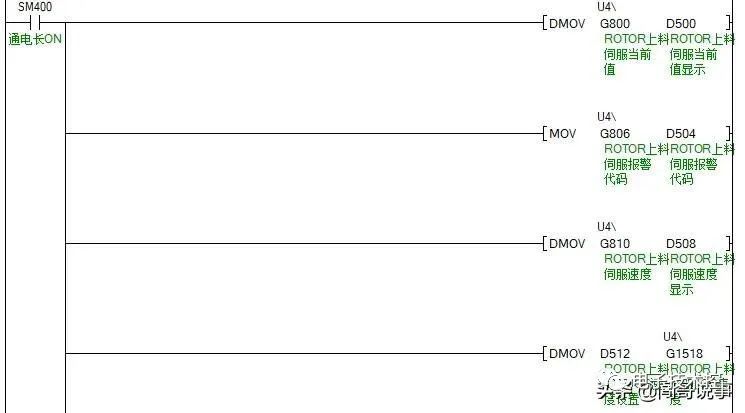
当前状态反馈 ②.控制参数: 写入JOG速度、伺服定位速度等相关的控制参数。
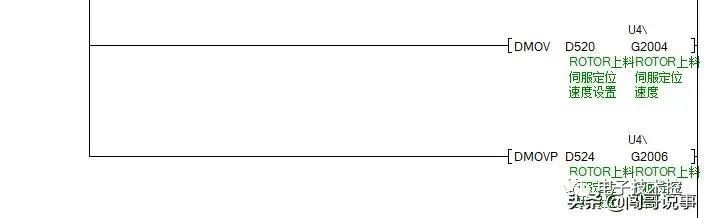
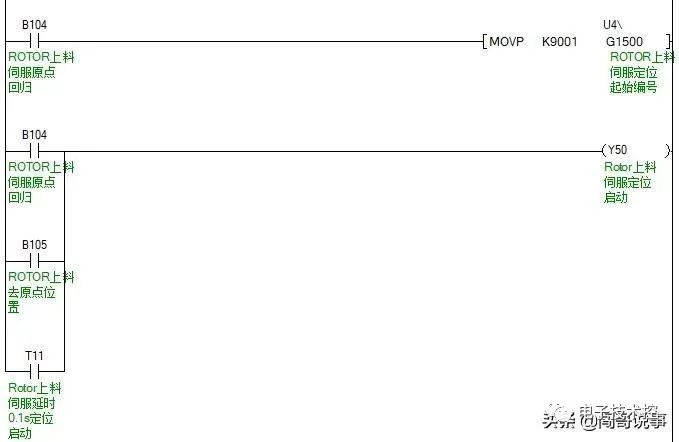
控制参数 8.伺服定位启动程序 包含伺服定位起始编号、定位地址、定位启动信号。

定位启动参数写入
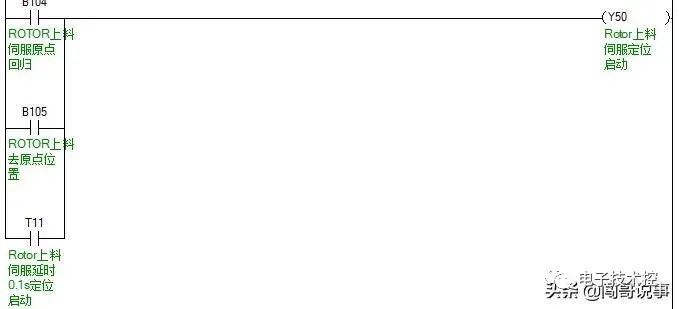
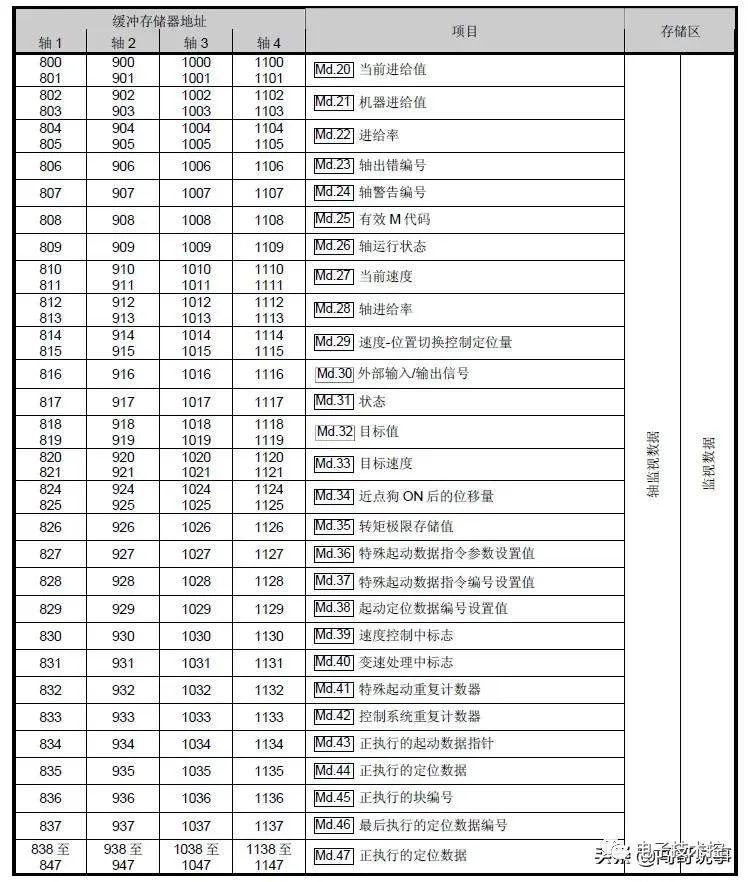
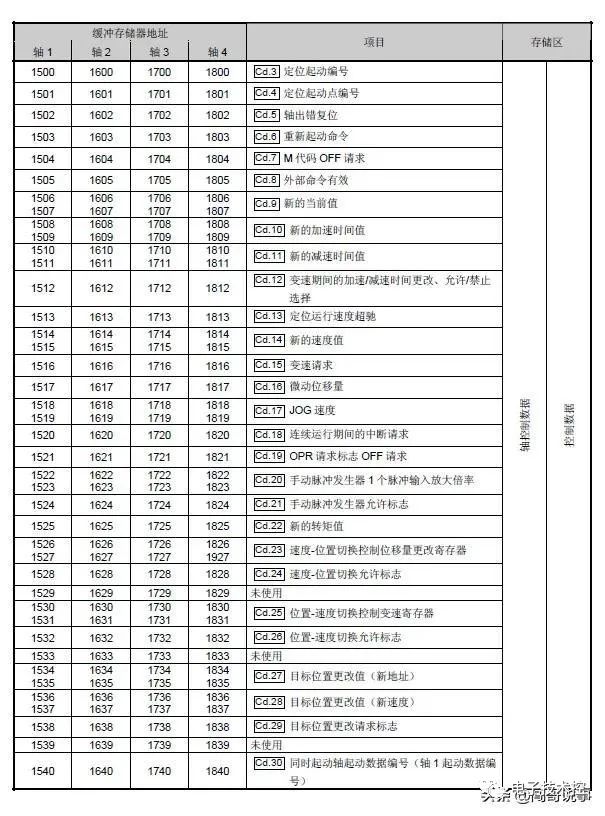
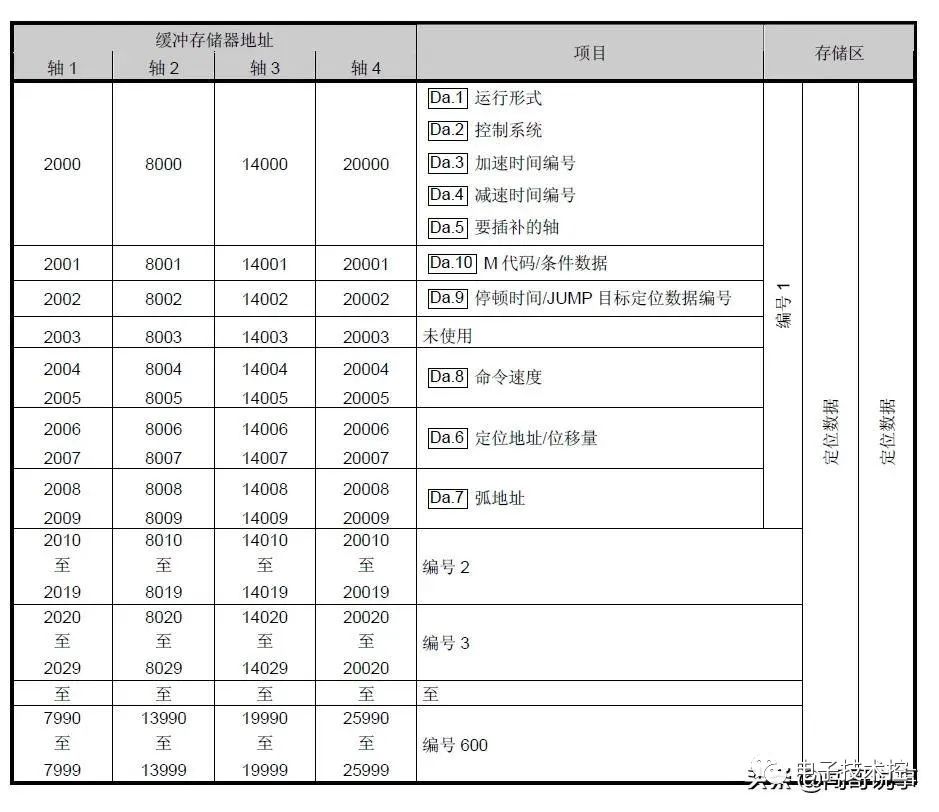
定位启动 9.试运行 按照以上的步骤,就可以试运行伺服马达了。 关注电子技术控,学习更多电气知识! 附:缓冲存储器地址分配表
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
三菱PLC伺服控制系统介绍2024-12-26 3265
-
三菱伺服用什么总线控制2024-07-01 4425
-
三菱PLC与三菱触摸屏的通讯设置2024-06-18 12745
-
三菱PLC控制伺服马达实例2023-04-11 4907
-
自已编写的QD75D1控制三菱伺服马达的程式+注释2022-05-16 821
-
三菱PLC编程实例之例程编写的QD75D1控制三菱伺服马达2022-05-11 1545
-
三菱PLC编程实例项目例程-伺服电机控制2022-03-22 2068
-
三菱plc与西门子plc编程有什么不同?2021-12-21 6834
-
回收三菱PLC,三菱模块,三菱触摸屏,三菱伺服驱动器,三菱伺服马达2021-10-08 731
-
三菱plc读取时钟程序_三菱plc怎么读取程序2018-04-10 34598
-
三菱plc型号大全2018-03-26 101390
-
三菱Q系列带伺服的磨床程序2016-12-10 950
-
三菱plc应用指令2008-11-21 3163
全部0条评论

快来发表一下你的评论吧 !
