

PLC与运动控制器的区别 运动控制器的工作原理
工业控制
描述
运动控制器是一种电子设备,通常与运动控制软件配合使用,用于控制机器人、数控机床和其他自动化设备移动或执行各种任务。
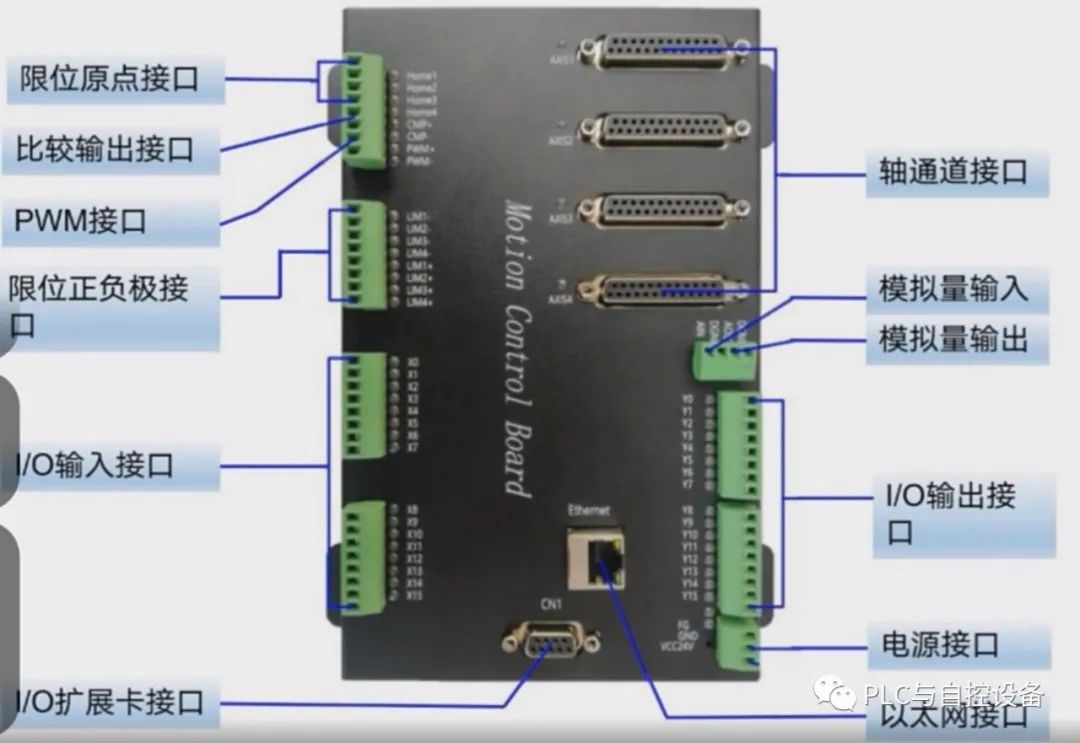
运动控制器的工作原理是将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置(点位、运动轨迹、插补等)控制、速度控制、加速度控制、转矩或力的控制。
广义的运动控制器按结构分类可分为PLC可编程逻辑控制器、单片机控制器、独立式运动控制器、基于PC机的运动控制卡、网络控制器等。
运动控制器主要分为三类,分别是PC-based(工控计算机)、专用控制器、PLC。其中,PC-based 运动控制器是一种基于个人计算机的开放式运动控制系统,它具有灵活性和可扩展性,但需要较高的技术水平;专用控制器是一种针对特定应用场景而设计的专用控制器,它具有较高的可靠性和稳定性;PLC 运动控制器则是一种基于可编程逻辑门阵列(PLC)的通用型控制器,它具有较高的性价比和适用范围广的特点。
运动控制器和PLC都是自动化控制系统中的重要组成部分,你中有我,我中有你,但它们的应用场景和侧重功能有所不同。运动控制器主要用于控制步进电机、伺服电机等运动部件,而PLC则主要用于控制逻辑电路、人机界面等。 它们的区别如下:
控制对象不同:运动控制器主要控制运动部件,而PLC主要控制逻辑电路和人机界面。
控制方式不同:运动控制器通常采用脉冲输出或方向输出等方式进行控制,而PLC通常采用开关量输入和输出进行控制。
编程语言不同:运动控制器通常使用C或C++等高级语言进行编程,而PLC通常使用Ladder Diagram(梯形图)等低级语言进行编程。
在实际应用中,运动控制器和PLC可以结合使用,以实现更复杂的运动控制任务。例如,可以使用PLC作为主控制器,将运动控制器作为从控制器来实现更高级别的运动控制。
编辑:黄飞
-
运动控制器接电子尺的工作原理2025-03-14 2293
-
LabVIEW运动控制(一):EtherCAT运动控制器的SCARA机械手应用 #正运动技术 #运动控制器正运动技术 2025-01-09
-
运动控制器与plc编程一样吗2024-06-12 1981
-
运动控制器与PLC有什么区别2024-06-11 4569
-
PLC和运动控制器的比较,在哪些要求下选用运动控制器?2023-08-08 2601
-
PLC和运动控制器的比较2023-08-06 2981
-
PLC、运动控制卡、运动控制器,怎么区分?如何选用?2023-08-04 3818
-
什么是运动控制器 运动控制器与PLC的区别2023-04-21 1720
-
四元数数控:深圳运动控制器有什么工作原理及应用?2021-11-03 1131
-
运动控制器比plc高级吗2021-09-19 5886
-
东莞运动控制器的工作原理及应用2021-08-02 1017
-
运动控制器与PLC的区别是什么2021-03-02 2973
-
什么是运动控制器_运动控制器的工作原理及应用2018-04-23 39437
-
运动控制器与plc区别2017-10-19 30874
全部0条评论

快来发表一下你的评论吧 !
