

基于51单片机的模拟舵机控制实验
控制/MCU
1936人已加入
描述
一、实验原理
1、舵机转动的原理(如下图所示)
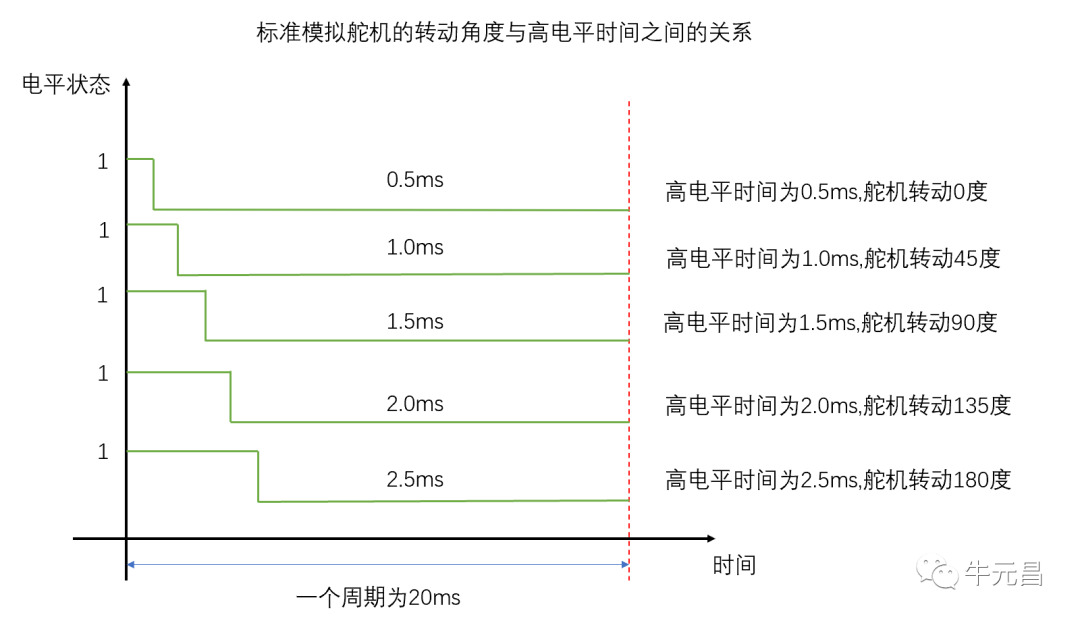
1.根据上图我们可以得知,要想控制舵机转动指定的角度,必须要让它在一定的周期(20ms)中,获得一定时间(分别是0.5ms、1ms、1.5ms、2ms、2.5sm)的高电平,具体对应关系,上图中已给出。
2.现在我们要做的就是生成一个周期为20ms的PWM波,通过设定一个比较值(最大为20ms),用来控制我们的高电平时间,进而控制舵机转动指定角度。
2、生成PWM波的原理
1.用定时来实现,设定一个初始值,使其溢出时间为500us,再设定一个计数值,控制PWM波的周期,该值最大为40(500us*40=20 000us),如此便设定了周期为20ms;计数值会一直和比较值做比较,这样就可以实现高电平时间的控制。
2.通过上述三个值的调节,就可以实现舵机不同角度的转动。
二、关键代码
/*定时器0初始化函数*/
void Timer0_Init()
{
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式
TL0 = 0x33; //设置定时初始值 晶振为11.0592M
TH0 = 0xFE; //设置定时初始值
ET0 = 1; //打开定时器0的中断
TF0 = 0; //清除溢出中断标志位
TR0 = 1; //定时器0开始计时
EA = 1; //开总中断
}
/*中断服务程序子函数*/
void Timer0() interrupt 1
{
TL0 = 0x33;
TH0 = 0xFE; //重新赋计数初值为500us
count++; //计次,每500us count+1
count%=40; //周期为20ms
if(count< PWM_count)
{
SG_PWM=1;
}
else
{
SG_PWM=0;
}
}
注:若要实现不同角度的控制,只需要改变 PWM_count的值就好。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于89C51单片机的舵机按键控制程序源程序2023-05-16 1034
-
51单片机-步进电机-舵机2021-11-23 1240
-
最简单DIY基于51单片机的舵机控制器2021-11-20 1444
-
51系列单片机舵机2021-11-14 1319
-
51单片机舵机控制2021-11-05 1663
-
基于51单片机的舵机控制器设计2020-11-19 8686
-
使用51单片机按键直接控制舵机旋转的程序免费下载2019-06-25 1812
-
如何使用51单片机按键控制舵机旋转2019-06-18 1941
-
使用51单片机进行舵机控制实验的手册资料免费下载2019-04-02 1340
-
一文解析51单片机PWM双舵机控制(附程序)2018-04-18 28193
-
单片机实现舵机转角控制2016-04-28 1178
-
51单片机控制舵机2015-11-10 2369
-
51单片机控制舵机程序2015-11-02 1654
全部0条评论

快来发表一下你的评论吧 !
