

电伺服焊钳更换电机的详细步骤
机器人
551人已加入
描述
更换 C-5000 伺服电机

请注意,更换电机后必须对焊钳实施行程测量和力校准。
步骤 1: 切断机器人焊钳的电源。
步骤 2: 将带焊钳的机器人移至一个安全的维护位置。
或者分离机器人焊钳与机器人,并将机器人焊钳定位至适合进行维护工作的基架上。
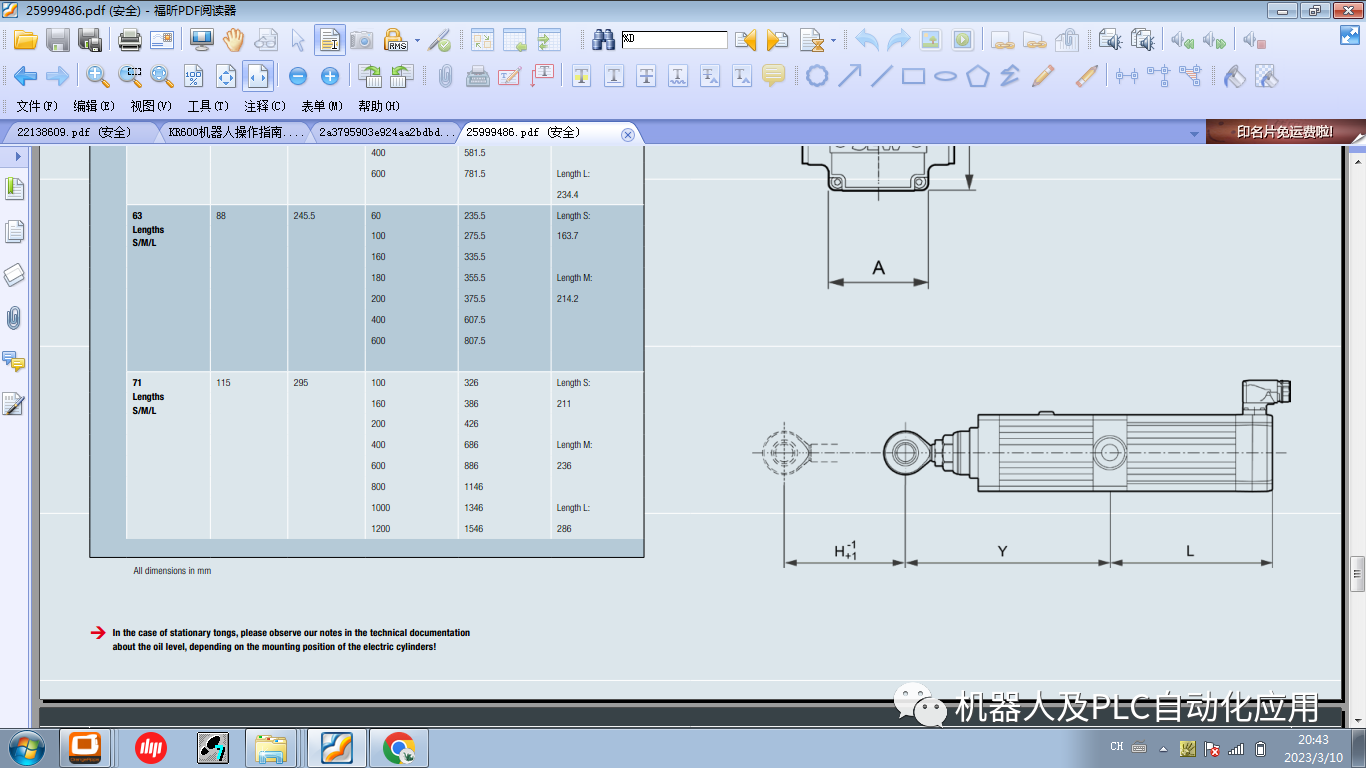
步骤 3: 在焊钳的开放冲程下测量电极顶端之间的开口尺寸 Y。
尺寸 “Y” 在更换电机后必须用活接头螺栓重新调节。
步骤 4: 断开伺服电机的电气连接和冷却水管道。
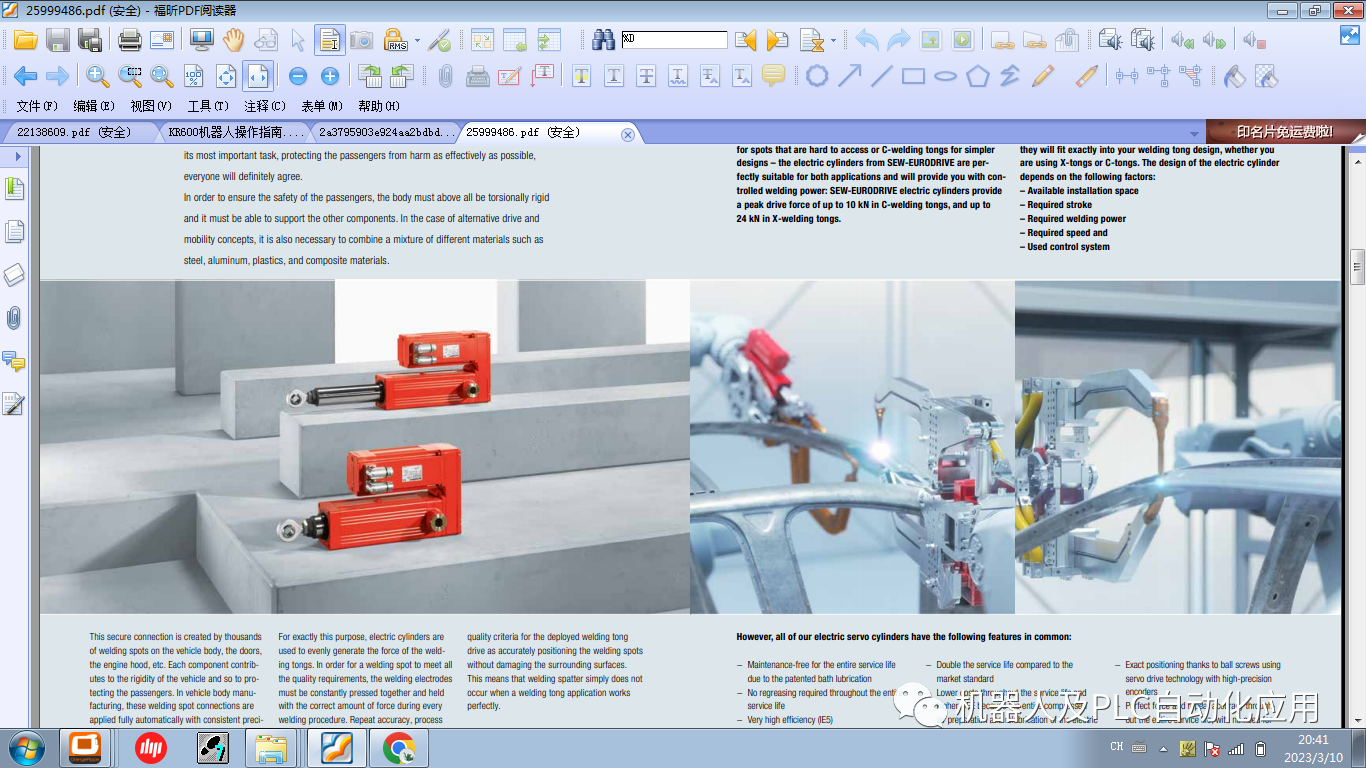
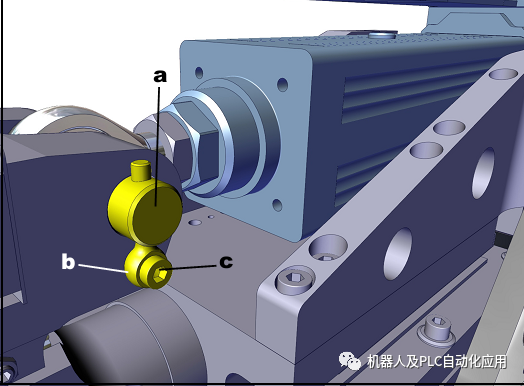
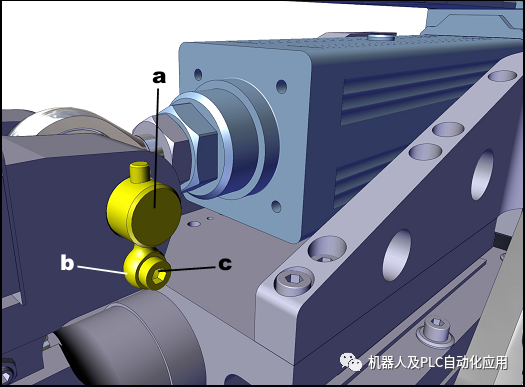
步骤 5: 从移动式电极的滑块上取下紧固销 (a)。为此,通过安全螺栓 (c) 取下微型活接头 (b)。
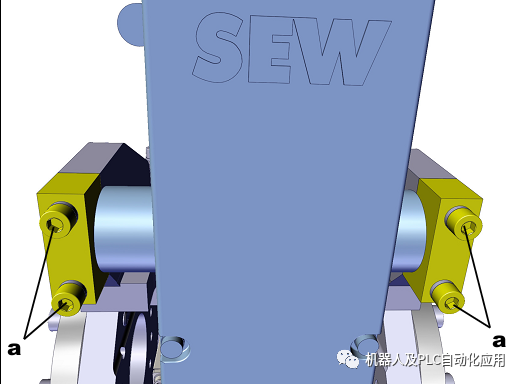
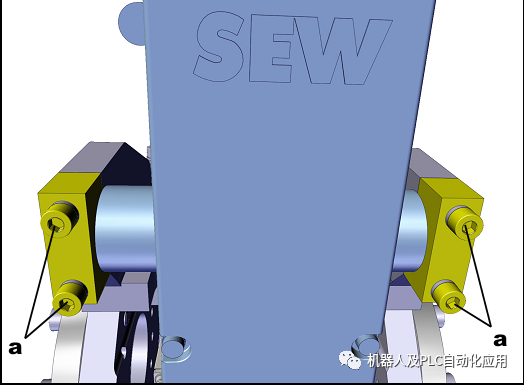
步骤 6: 移除两个夹爪的四颗固定螺栓 (a),然后取下伺服电机。
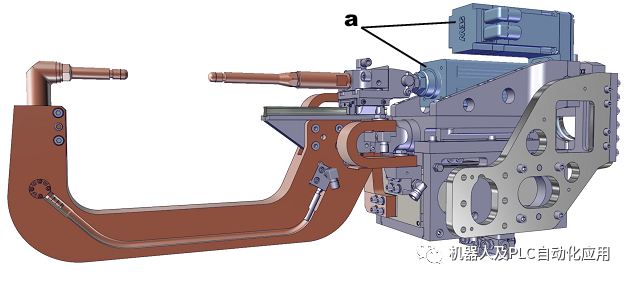
步骤 7: 在伺服电机取下时测量从活接头螺栓中点至电机活塞杆的尺寸“X”。
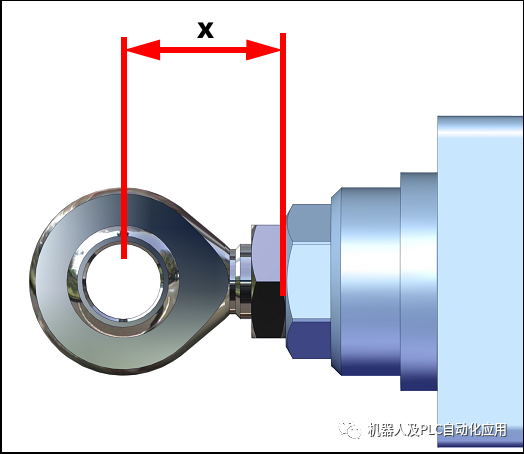
尺寸 “X” 负责焊钳的开口尺寸,在使用新电机时必须进行调节。在调节后锁紧活接头螺栓。
步骤 8: 放入新伺服电机。
步骤 9: 拧紧两个夹爪的四颗固定螺栓 (a)。
步骤 10: 在移动式电极的滑块上安装紧固销 (a)。为此,用安全螺栓 (c) 安装微型活接头 (b)。
步骤 11: 完成电机的电气和冷却水连接。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服电机的编码器能否更换?2023-12-26 1078
-
调试伺服电机的步骤有哪些2021-09-30 1953
-
电机选型经典计算公式和电机选择步骤及伺服电机选型实例免费下载2018-09-29 8251
-
电伺服焊钳铣削分析:用户铣削2020-06-11 3474
-
伺服电机规格选用步骤2020-09-11 5777
-
更换伺服电机需要多久,其实不用很久2021-07-11 2859
-
电机选型的详细步骤有哪些2021-08-25 80531
-
电伺服焊钳的摆臂铣刀的SG_Background控制2022-07-26 1505
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 1675
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 2432
-
伺服电机选型计算有哪些步骤2023-12-01 4199
-
三相异步电机线圈更换的几个步骤和技巧2023-12-19 2686
-
松下伺服电机怎么调速度2024-06-12 3497
-
直流伺服电机和交流伺服电机的差异2024-06-19 2190
全部0条评论

快来发表一下你的评论吧 !
