

【产品应用】MX2000上如何拓展CAN接口?
描述
MX2000平台接口虽然丰富,但其本身不具备CAN接口。如果在实际产品应用中,需要使用到CAN接口的时候那该怎么办呢?本文将以新产品MX2000核心板为例讲述如何解决该问题。
 概述
概述
MX2000平台上不具备CAN接口,但可通过我司CSM300(A)系列SPI(UART)转CAN模块进行拓展CAN接口。在实际产品应用场景中如果需要使用CAN接口,则可以参考本文进行拓展、测试、评估。
 软硬件准备
软硬件准备
- 硬件:MX2000-EV-Board评估板一块、CSM300(A)模块一个、CSM-Eval评估套件一个、连接线缆若干、电源等;
- 软件:MX2000 SDK、CSM300(A)技术支持包等。
硬件设计和连接使用SPI转CAN功能时,需要将CSM300(A)的MODE引脚接至高电平(3.3V)。MCU的SPI接口与CSM300(A)的SPI接口连接,同时MCU需要提供GPIO与RST、INT、CTL0、CTL1引脚连接,实现对CSM300(A)的有效监测与控制。若需要通过MCU对CSM300(A)进行配置,则需要额外的GPIO与CFG引脚连接。图1是CSM300A的参考电路。不使用的模块引脚只需悬空而不用连接,以免因电路连接不当从而造成模块损坏。
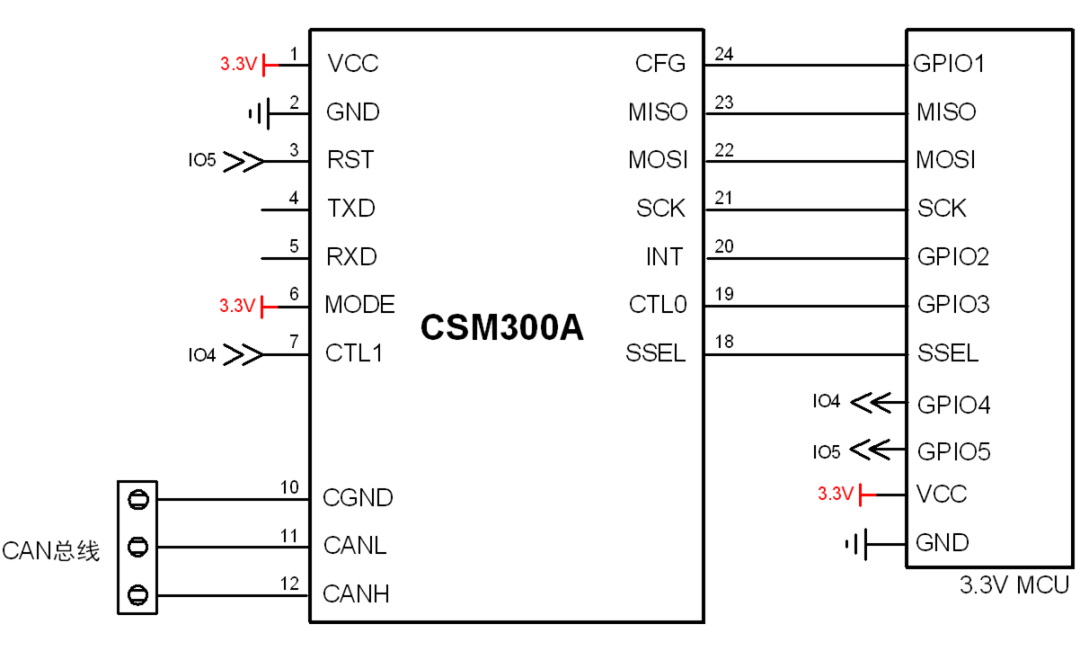
图1 CSM300参考电路图如果仅需评估,则可以通过CSM-Eval评估套件将CSM300(A)和MX2000-EV-Board连接。CSM-Eval评估套件需要使用一路SPI接口和5个电平为3.3V的GPIO;MX2000-EV-Board在J28上引出了SPI1和若干个电平为3.3V的GPIO,具体接线可以参考表1所示。表1 CSM-Eval接MX2000-EV-Board引脚对应表
CSM-Eval引脚 | MX2000-EV-Board端引脚 | CSM-Eval引脚 | MX2000-EV-Board端引脚 |
SSEL | SSI1_CE0 | CFG | PB27 |
SCK | SSI1_SCK | INT | PC20 |
MISO | SSI1_DI | CTL0 | PB24 |
MOSI | SSI1_DO | CTL1 | PB25 |
GND | GND | RST | PB26 |
VCC | 3.3V |
软件改动1. 修改设备树在设备树中增加如下节点:
&spi1 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = <&spi1_pe_normal>, <&spi1_pe_cs>; spi-max-frequency = <2000000>; num-cs = <1>; cs-gpios = <0>; ingenic,chnl = <0>; ingenic,allow_cs_same = <1>; ingenic,bus_num = <0>; ingenic,has_dma_support = <0>; ingenic,spi-src-clk = <1>;/*0.ext; 1.ssi*/
/delete-node/ spidev@0; // 删除原有spidev节点 csm300@0 { compatible = "zhiyuan,csm300"; status = "okay"; spi-max-frequency = <1000000>; reg = <0>; gpios = <&gpb 24 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CTL0引脚 */ &gpb 25 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CTL1引脚 */ &gpb 26 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* RST引脚 */ &gpb 27 GPIO_ACTIVE_LOW INGENIC_GPIO_NOBIAS /* CFG引脚 */ >; interrupt-parent = <&gpc>; interrupts = <20 IRQ_TYPE_LEVEL_LOW>; };};
2. 增加驱动并修改内核配置
驱动文件请联系FAE或者销售工程师。将驱动文件csm300.c,放置于kernel/drivers/net/can/spi/文件夹下。并在该目录的Makefile文件中加入以下内容:
obj-$(CONFIG_CAN_CSM3XX) += csm300.o/*添加至文件末尾*/
同时在该目录下的Kconfig文件中加入以下内容:
config CAN_CSM3XX tristate "CSM3XX SPI CAN controllers" help Driver for CSM3XX SPI CAN controllers.
最后在menuconfig菜单中或defconfig配置文件中,打开对应内核配置,重新编译内核并烧录到评估板中。
成功加载并且硬件连接无误的情况下,会出现如下log打印。
[root@MX2000:~]# dmesg | grep csm[ 0.991286] csm300 check id response:[ 0.991356] csm300 spi0.0: csm300 check id succeed[ 0.991717] csm300 spi0.0 can0: csm300 successfully initialized.
如果硬件连接不正确,则会在初始化时候出现以下错误log打印。
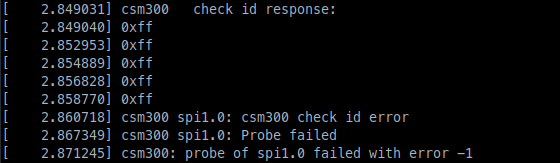
图2 CSM300(A)初始化错误LOG图
性能测试
将CSM-Eval评估套件通过USB CAN卡USBCAN-4E-U和电脑连接,框图如图3所示。
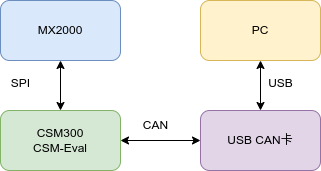
图3 连接框图参考以下命令,对CAN进行配置:
[root@MX2000 ]# ip link set can0 down[root@MX2000 ]# ip link set can0 type can bitrate 1000000 #设定比特率[ 3205.411204] set bitrate is 1000000[root@MX2000 ]# ip link set can0 up #挂起can卡[ 3210.251020] csm300 check id response: [ 3210.251031] 0xf7 [ 3210.255100] 0xf8 [ 3210.257092] 0x2 [ 3210.259082] 0x13 [ 3210.260984] 0x1e [ 3210.451014] csm300 setup response: [ 3210.453010] 0xf7 [ 3210.456620] 0xf8 [ 3210.458610] 0x1 [ 3210.460599] 0x13 [ 3210.462498] 0x1d [ 3210.464486] csm300 setup succeed[root@MX2000 ]# echo 204800 > /sys/class/net/can0/tx_queue_len #设置发送队列长度
MX2000端推荐使用以下命令进行测试。其中-g 后面所带参数代表间隔时间(单位:s),经过测试会直接影响丢包率,最优为0.1。
[root@MX2000 ]# cangen -g 0.1 -I 0x122 -L 8 -D i can0 -n 204800
电脑端使用ZCANPRO专业软件进行测试,得出结果在此帧率下丢包率为0%,如图4所示。
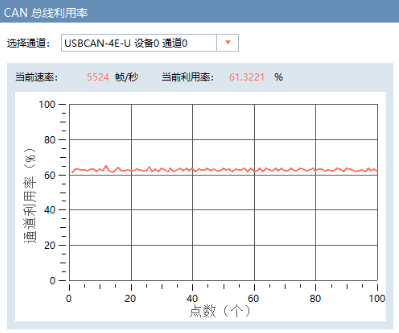
图4 性能测试结果图
-
#硬声创作季 主要元器件原理与产品应用:17 - 外部通信接口04 - CAN应用电路与电平规范Mr_haohao 2022-09-18
-
飞思卡尔产品应用群,857890882009-07-09 3841
-
i.mx6Q芯片强大的接口标准2014-08-25 3740
-
鸥鹏机器人产品应用案例2016-04-11 6009
-
MX2000 内置三端稳压器两路达林顿驱动电路2016-06-28 10775
-
CEAC全频段LTE数据产品应用是什么?2021-05-21 1617
-
车载无线充电产品应用2021-09-14 1958
-
CAN-bus接口控制实验2008-09-26 2525
-
智能建筑产品应用案例2011-02-25 764
-
2000数据接口定义2016-12-23 1566
-
新产业拓展应用场景,深化产品应用2020-04-26 3446
-
详解列控中心与ZPW-2000轨道电路接口2023-05-22 10156
-
【产品应用】MX2000上如何拓展CAN接口?2023-06-21 1541
-
CAN接口与485接口如何实现互相转换?2023-09-14 11452
-
千兆以太网解决方案:MX2000核心板,高性能不高价2024-11-15 1176
全部0条评论

快来发表一下你的评论吧 !
