

PLC实例:顺序控制指令,实现搬运动作
电子说
描述
今天咱们来谈一谈如何利用PLC来实现简单的搬运动作。这个例子完美地用到了顺序控制的指令,实际应用起来真的是非常方便,程序循环控制起来也是得心应手!
废话不多说,进入我们今天的主题!
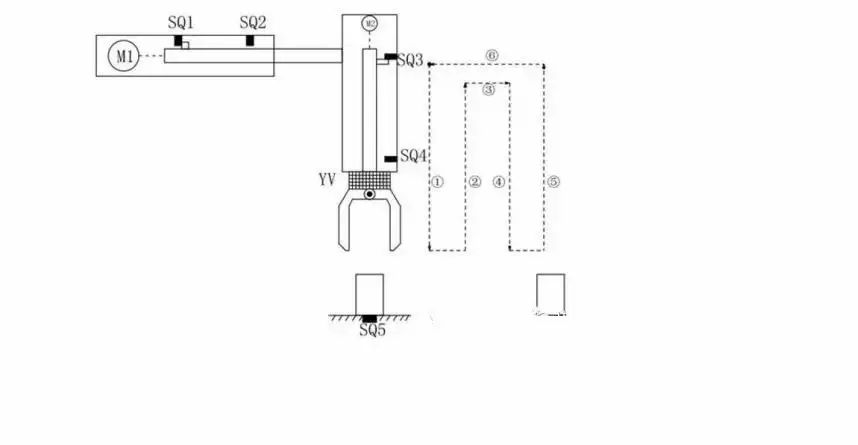
▲ 简易机械手结构图如图所示
M1为控制机械手左右移动的电动机
M2为控制机械手上下升降的电动机
YV线圈用来控制机械手夹紧防松
SQ1为左到位检测开关
SQ2为右到位检测开关
SQ3为上到位检测开关
SQ4为下到位检测开关
SQ5为工件检测开关

简易机械手的控制要求如下:
机械手要将工件从工位A移到工位B 处;
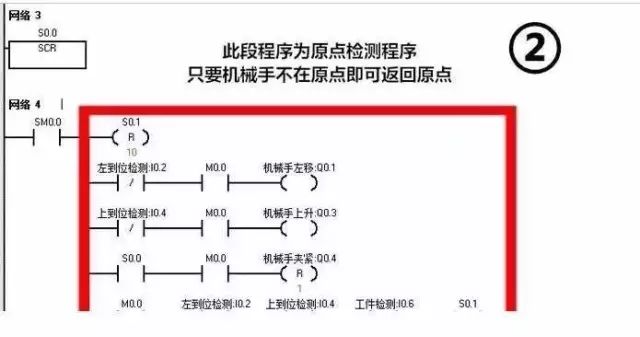
机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
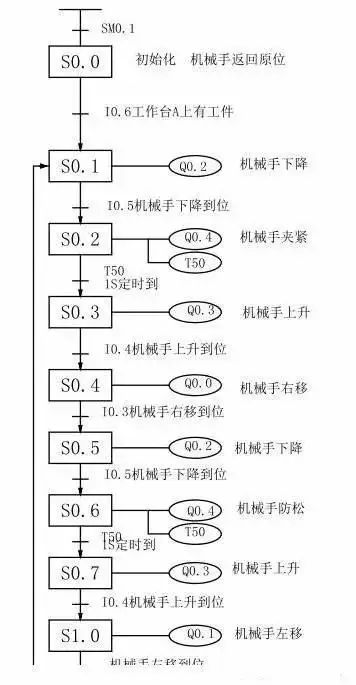
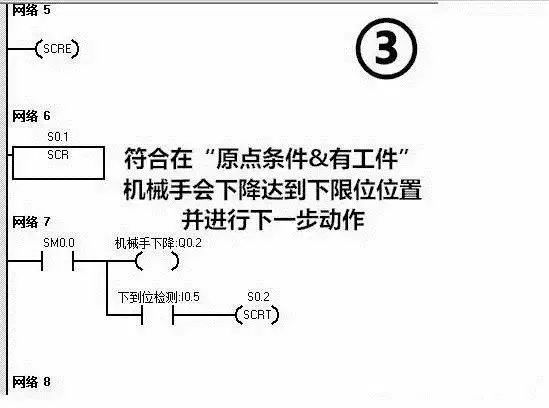
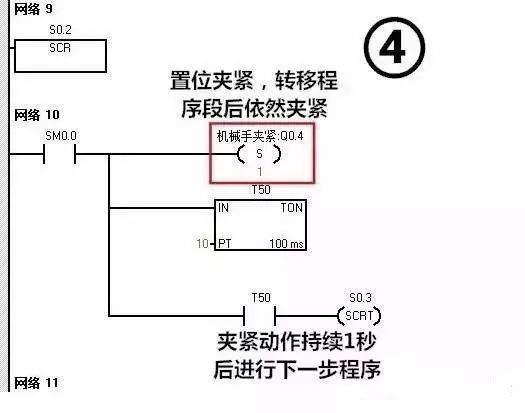
若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→放松→上升→左移→原点”的步骤工作。
动作图编程前理顺动作如何转移:
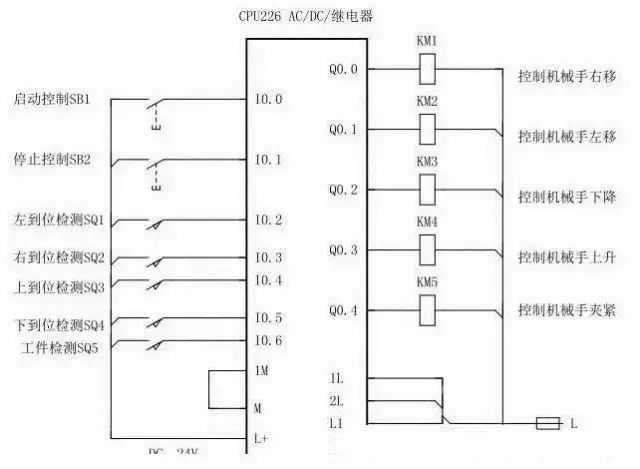
定义符号表:

硬件的接线图:
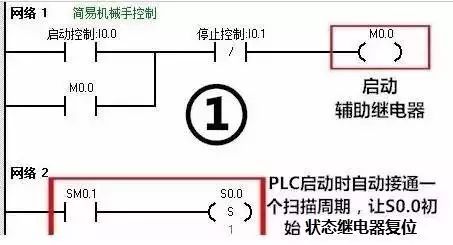
满足所有动作的程序如下:

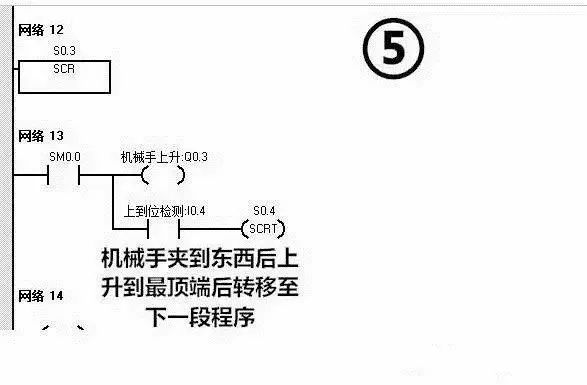
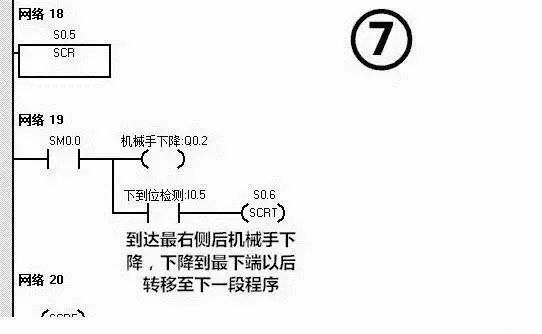
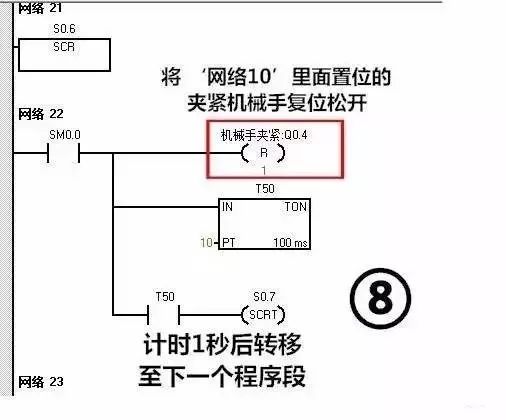
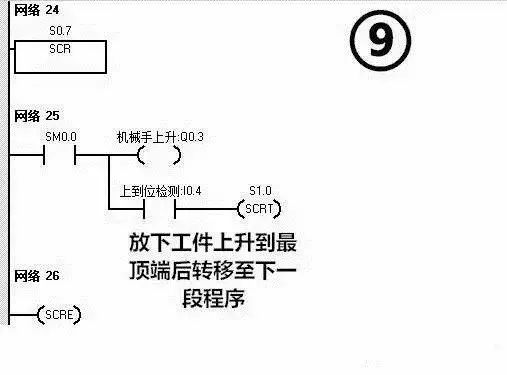
一大堆梯形图看着真是眼花缭乱,不用担心我们一段一段分析分析这个机械手是如何工作的!
---------------------------------------------------------------------------------------
其实这个图没有那么多的并行分支,所以转移起来逻辑非常简单!
--------------------------------------------------
----------------------------------------------
------------------------------------------------
----------------------------------------------
----------------------------------------------------
--------------------------------------------------------------
--------------------------------------------------
--------------------------------------------------
-
PLC编程案例之控制机械手实现简单搬运流程2024-01-18 5959
-
PLC顺序控制实例2023-07-19 4188
-
通过PLC和遥控器实现搬运平车的运动控制2023-07-02 4853
-
如何利用PLC实现简单的搬运动作2023-05-10 1978
-
西门子S7-1200 PLC程序控制指令:跳转与标签指令2023-03-07 11871
-
求助关于codesys实现运动控制的设想2023-01-09 1482
-
西门子S7-1200运动控制指令的使用2022-11-16 22843
-
如何利用PLC来实现简单的搬运动作?2022-11-02 1118
-
顺序控制指令的功能2022-09-06 4910
-
Logix5000控制器运动控制指令集资料合集免费下载2019-09-27 1489
-
三菱plc如何实现顺序控制_四种三菱plc顺序控制编程方式实例2018-04-02 44563
-
PMC功能指令:程序控制指令2017-09-29 1524
-
用PLC基本指令实现自动运动定位控制的研究2010-02-11 821
-
三菱PLC QnPHCPU编程手册(过程控制指令)2008-11-21 1020
全部0条评论

快来发表一下你的评论吧 !
