
资料下载


Arduino的现代RTOS和状态机开源分享
生龙活虎3
分享资料个
传统的顺序 Arduino 编程
传统的 Arduino 编程模型被称为“顺序编程” ,因为预期的事件序列通常硬编码在阻塞调用序列中,这些阻塞调用排队等待预期事件的到达。
例如,在标准的 Arduino Blink 示例中,您期望通过delay()两次调用 Arduino 函数在线等待的两个超时事件序列。
清单 1:Arduino 顺序编程示例(标准 Arduino Blink 示例)
void loop() {
digitalWrite(13, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(13, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
这种方法适用于简单的问题,但对于更复杂的项目来说扩展性很差并且很快变得不可行,在这些项目中你需要同时做很多事情,例如以不同的速率闪烁第二个 LED。
根本问题是,当一个顺序程序在等待一种事件(例如,时间延迟)时,它不做任何其他工作,也不响应其他事件(例如,不同的时间延迟或按钮按下) .
Arduino编程无阻塞
由于这些原因,更有经验的 Arduino 程序避免阻塞(或轮询)并在线等待事件,例如dealy()函数。相反,程序仅检查感兴趣的条件(使用显式if()语句)并仅在检测到事件时处理事件。在任何情况下,Arduinoloop()函数总是快速返回,这使得程序能够响应其他事件。
这种方法的示例包括使用 Arduinomillis()函数(例如,参见Arduino 项目“使用 millis() 函数作为使用 delay() 的替代方法” )。
清单 2:无阻塞的 Arduino 编程示例(项目“Using millis() Function as an Alternative to Using delay()” )
void loop() {
ms_from_start = millis();
if (ms_from_start-ms_previous_read_LED1>LED1_interval) {
ms_previous_read_LED1 = ms_from_start;
if (LED1_state == 0) LED1_state = 1;
else LED1_state=0;
digitalWrite(LED1,LED1_state);
}
}
非阻塞 Arduino 程序的基本示例是朝着正确方向迈出的一步,因为非阻塞代码片段是可组合的。可组合意味着您可以在单个 Arduino函数中将许多此类非阻塞代码片段(无需修改)组合成代码。loop()
但是这种方法的主要问题是随着项目复杂性的增加,嵌套if和else分支的数量迅速增加。这种架构衰退也被称为“意大利面条代码”问题。
此外,简单的非阻塞程序没有防止中断和loop()函数之间共享的全局“输入”损坏的保护措施。这会导致竞争条件。
事件驱动的 Arduino 编程
所有这些问题的长期解决方案被称为“事件驱动编程” ,它具有以下特点:
- 程序内的所有通信和同步都由专门为异步通信设计的特殊事件对象介导。
- 事件驱动程序自然分为实际处理事件的应用程序和一般等待事件并将它们分派给应用程序的监督事件驱动基础设施(框架)。
- 控制驻留在事件驱动的基础设施(框架)中,从应用程序开发人员的角度来看,这会导致控制反转。
- 应用程序代码必须在不阻塞或轮询的情况下处理事件直到完成(一次一个事件) 。
QP/C++ 框架提供了这样一个事件驱动的基础架构,它专为深度嵌入式系统设计,例如 Arduino 板。
QP/C++ 可以与各种实时内核一起使用。在QP-Arduino集成中,QP/C++配置了最简单的协同QV调度器,软件采用无限事件循环结构,如下图所示:
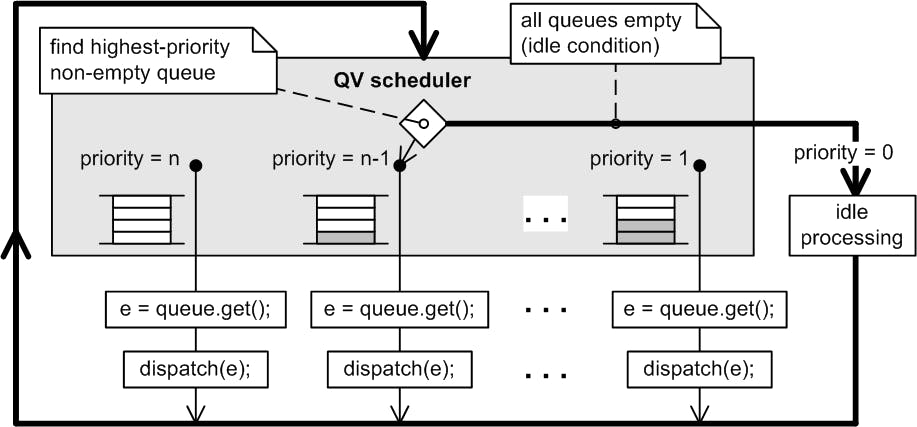
QV 内核设计中最重要的元素是存在多个具有唯一优先级的事件队列和分配给每个队列的“活动对象”。队列由 QV 调度程序持续监控,每次通过循环时都会选择最高优先级的非空队列。调度器找到队列后,从队列中提取queue.get()事件(dispatch(e)
QV 内核的另一个特点是它可以很容易地检测到没有可用事件的情况,在这种情况下系统可以进入低功耗睡眠模式。这使您可以实现更好的电源效率并将 Arduino 软件应用于低功耗、电池供电的应用程序。(注意:真正的低功耗还需要适当的硬件设计。)
分层状态机
除了为软件组件(称为“活动对象”)的并发执行提供事件驱动的基础设施外,QP/C++ 框架还提供了现代层次状态机,用于处理活动对象内的事件。使用状态机的主要好处是避免了“意大利面条代码”问题。
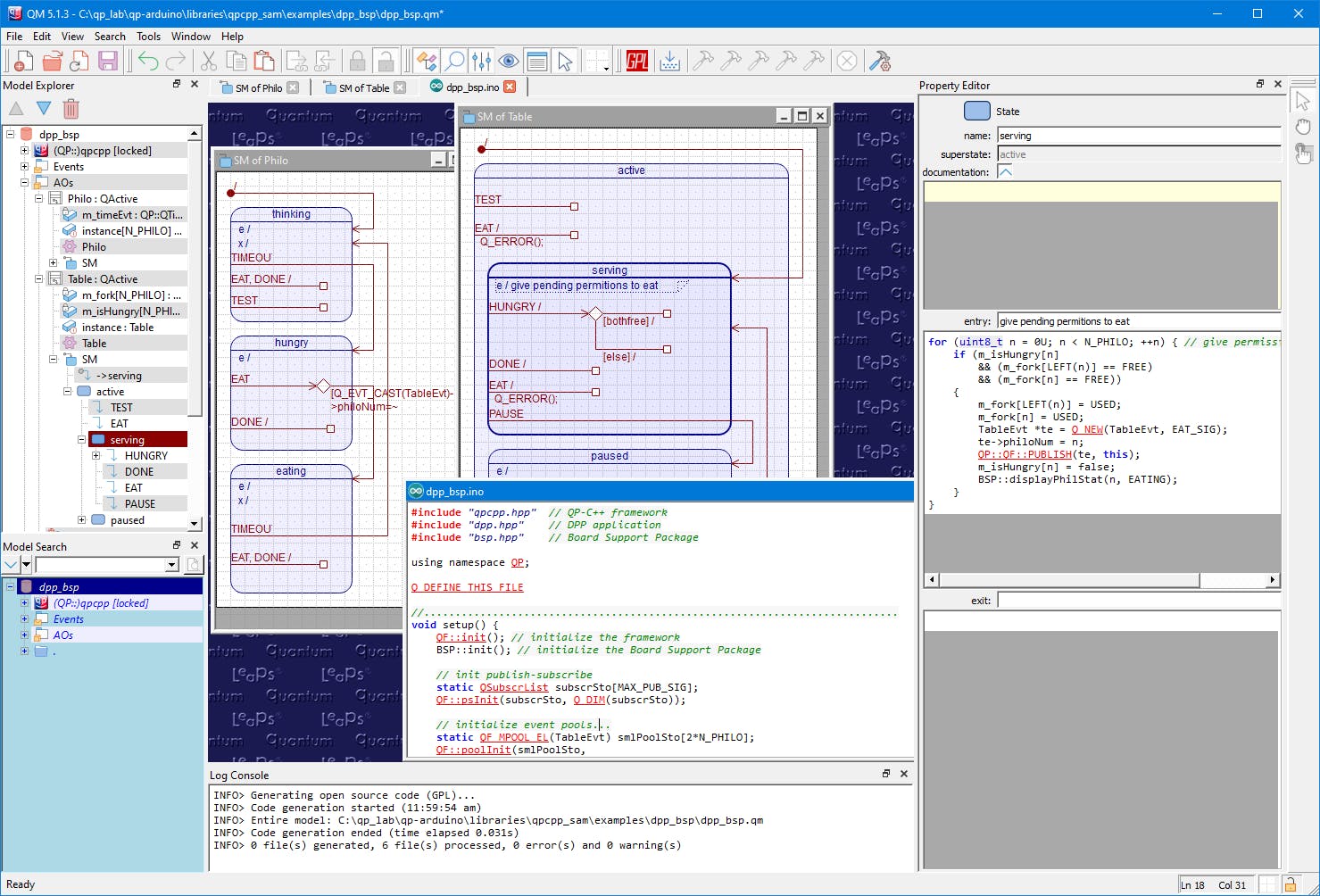
建模和自动代码生成
最后,QP/C++ 框架和高度结构化的分层状态机编码方式为可视化建模和自动代码生成提供了基础。QP-Arduino 集成包含免费软件QM 建模工具,它允许您以图形方式设计活动对象的分层状态机。下面的屏幕截图显示了 QP-Arduino 与状态机和代码集成的示例模型。
。“超越 RTOS”。
许可
QP-Arduino 集成中的 QP/C++ 框架在开源 GPLv3 许可下获得许可,并带有Arduino GPLv3 Exception。
例外情况允许您将 QP/C++ 与任何Arduino 认证板一起使用,而无需打开您的专有应用程序代码。
免费软件 QM 建模工具根据简单的 EULA获得许可。
支持
您可以通过以下方式发布有关 QP-Arduino 软件的任何问题或意见:
- 在 Arduino PROJECT HUB 上对该项目的评论
- 在QP-Arduino 项目网页上发表评论
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




