

介绍X波段相控阵探测平台—“相位器”
描述
本文深入探讨ADI公司刚刚发布的一款新型相控阵探索平台:EVAL-CN0566-RPIZ,通常称为“相位器”。相位器将使我们离更实用的相控阵系统更近一步。它的功能集将允许对波束成形和雷达进行实验,这是我们无法用2元素冥王星数字波束成形器涵盖的原理。
为什么我们需要波束成型器?
对于那些不熟悉这个主题的人,我应该从快速解释什么是波束形成器以及为什么你可能想要一个开始。关于这两个话题可以说很多!但很快:目标是在不物理移动天线的情况下操纵天线“波束”。
但是现在想象一下,扫描已经完成,不是通过机械移动天线,而是通过电动转向波束。 这将使我们能够快速(几乎立即)将光束定位到我们想要的任何位置。甚至可以创建多个天线波束,每个天线波束都集中在不同的目标上。
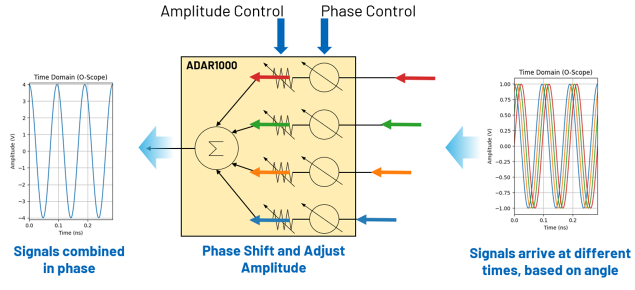
波束成型器如何工作?
好的,现在我们想要一个波束成型器。但是我们如何制造一个呢?基本概念是在阵列中设置多个天线(在一条线上或沿二维平面间隔),然后延迟每个天线元素的计时,以便它们在一个方向上建设性地求和,并在所有其他方向上破坏性地求和。这个概念并不像听起来那么难,这篇博客文章涵盖了这个概念。
但是,虽然基本概念很容易理解,但实现起来可能很困难。了解电动可控阵列(ESA)出现的所有问题可能需要一生的研究!我认为学习这个主题的最好方法是物理构建一个并对其进行实验。ADI公司的设计师Paul Brokaw曾经说过:“仿真将回答你提出的问题。实验室将回答您不知道要问的问题。
介绍相位器!
那么我们如何开始学习和试验波束成形器呢?ADALM-PLUTO希望能让我们对波束成形器的操作有所了解。但仅凭两个要素,我们只能做这么多。
移相器是一个 8 元件接收阵列,带有两个开关发射器。 它 通常在 10-10.5 GHz 的频率范围内运行,但通过连接到您自己的外部天线,它可以在 8 到 14 GHz 的任何地方运行。 整个系统的框图如下所示:
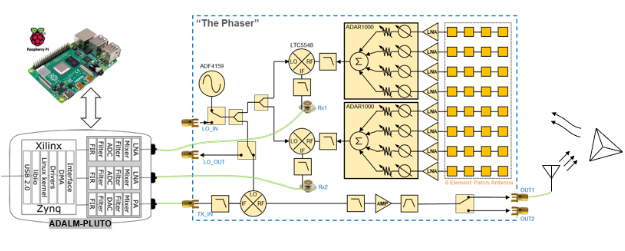
相位器内部有什么?
接收天线阵列集成到移相器的PCB中。8 个接收天线中的每一个都是一排 4 个独立天线元件的总和。因此,我们最终得到一个 8 元素、线性、均匀间隔的天线阵列。
这8个接收天线中的每一个都使用常用的ADAR10波束成形器芯片在RF频率(即~1000 GHz)下单独调整增益和相位。ADAR1000同时能够发送和接收。但为了保持相位器的成本较低,我们只实现了接收部分。ADAR1000的目的是调整每个元件接收信号的相位和增益,以便我们可以将信号连贯地组合到我们想要控制天线的方向。
然后,两个ADAR1000的输出由非常通用的ADALM-PLUTO进行数字化。但是由于冥王星的最大频率是6 GHz,我们必须首先从10 GHz混频到冥王星的频率范围内。这可通过 LTC5548 混频器实现。由于我们使用混频器,因此需要一个频率源来驱动混频器的LO端口。该LO使用ADF4159 PLL和HMC735 VCO在移相器的PCB上生成。ADF4159可以产生调频“线性调频”。我们不需要啁啾声来进行基本的波束成形,但是当我们谈论将相位器用于雷达应用时,它们将非常有用。
相位器还可以在两个端口上传输 10-10.5 GHz 波形:OUT1 和 OUT2。但是,这些是交换端口 - 而不是接收端那样的相位同步通道。切换通道允许我们构建一种称为“虚拟阵列”的东西 - 希望我们将在以后的博客中介绍。
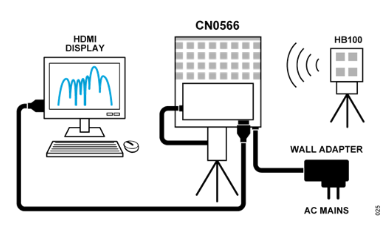
将所有这些结合在一起,就形成了一个紧凑且易于使用的相控阵实验平台:
在相位器上学到的所有知识都可以应用于更真实的波束成形解决方案,如ADI公司的X波段相控阵开发人员套件或Quad MxFE开发平台。
结论
在接下来的几篇博客文章中,我将进一步探讨如何使用相位器来试验各种波束成形原理: 光栅瓣、光束斜视、单脉冲跟踪、零转向、FMCW 雷达、雷达目标检测等。我将展示Phaser如何成为ESA设计的自然开端,并允许从创新到原型设计再到生产的顺利进行。
审核编辑:郭婷
-
伽利略X波段二维相控阵雷达震撼发布 重新定义安防探测新高度2025-12-11 1448
-
什么是相控阵天气雷达?2020-09-22 9326
-
多通道RF到位开发平台可实现相控阵的快速原型设计2020-08-21 3048
-
三波段红外火焰探测器参考设计2020-07-09 4398
-
【模拟对话】相控阵波束成形IC简化天线设计2019-10-01 3713
-
基于X波段的经典设计汇总2017-11-09 2001
-
【微波模块】X波段微波探测模块MDU17202017-02-06 2509
-
【微波模块】X波段长距离微波探测模块MDU42202017-01-13 2639
-
【微波传感】X波段中程微波探测模块MDU1750C2017-01-12 3343
-
【微波模块】X波段中程微波探测模块MDU17502016-12-28 3040
-
【微波模块】X波段中程微波探测模块MDU27502016-12-05 3870
-
【微波模块】X波段长距离微波探测模块MDU62202016-11-24 2684
-
X波段镜像抑制混频器设计2015-12-21 700
-
X波段是什么_X波段波长2011-12-31 19394
全部0条评论

快来发表一下你的评论吧 !
