

与工业机器人、协作机器人和移动机器人最相关的功能安全标准
描述
长期以来,我一直使用下图来表示我认为与工业机器人和协作机器人(具有适合协作应用的功能的机器人,例如基于 PFL 功率和力限制的应用)最相关的安全标准。
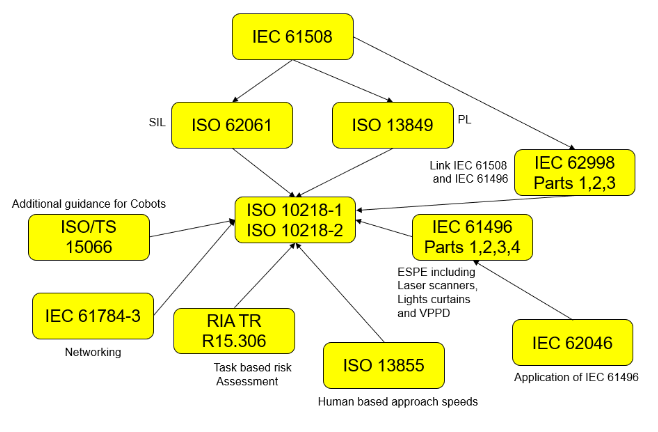
图 1 - 固定式工业机器人和协作机器人的核心标准集
其中许多标准也与mobots(移动机器人)相关,如果您将ISO 10218-1和ANSI R3691.4与ISO 15一起放在中间,而不是ISO 08-10218,则该数字可以重新用于mobots。根据您打算强调的内容,也许您会重新配置移动机器人图,如下所示。
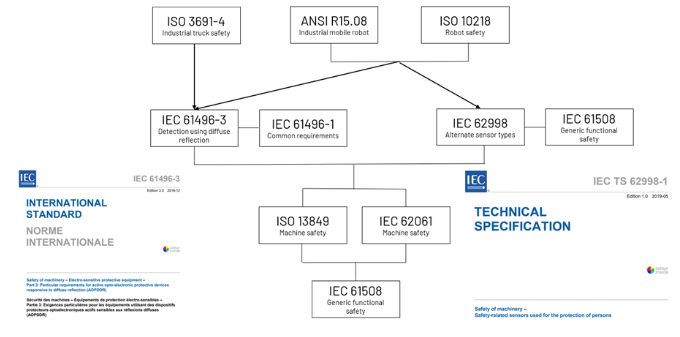
图 2 - 这次标准的不同视图强调了与 3D TOF 最相关的标准
但是,这两个图形仍然没有显示所有相关标准。即使我们忽略农业机器人、人类辅助机器人、医疗机器人以及任何更有可能在餐厅比在工厂车间找到的东西,情况也是如此。附上一些想到的其他内容以及原因。
IEC 62443 – 用于机器人的网络安全。我注意到最近流传的IEC 62443-1-5讨论了配置文件,因此也许我们可以有一个机器人配置文件。我本可以包括更多工业网络安全标准,但其中许多最终指向IEC 62443,所以我克制了自己。
IEC 62280/EN 50159 – 作为根据 IEC 61784-3 进行联网的替代方案
ISO TR 5469-1 – 如果您计划将人工智能用作机器人安全论点的一部分
IEC 60825-1 – 如果您的 ESPE 发出激光
IEC 61800-5-2 – 适用于机器人中可能使用的变速驱动器,即使所有参考(可能不是全部)已从 ISO 3 的拟议修订版 10218 中删除。
IEC 61800-5-3 – 如果您的机器人出于安全目的使用编码器
IEC 60204 – 如果没有别的,则用于停止类别。还包括与无线控制相关的要求。
ISO DTR 20218-1 – 用于末端执行器(包括夹具)的功能安全
ISO TR 20218-2 – 手动卸货站的安全设计
IEC 61131-6 - 这是PLC标准,如果您使用PLC控制机器人
ISO 12100 – 这是机械的基本安全标准
ISO 11161-2 – IMS(集成制造系统又名机器人单元)的安全要求
ISO 13850 – 急停功能
ISO 13482 – 个人护理机器人的安全要求
机械指令 – 如果您希望在欧洲销售您的机器人,尽管机器人通常只被视为部分完成的机器
审核编辑:郭婷
-
移动机器人常用传感器2012-08-20 6933
-
工业机器人经典好书籍——《工业机器人》2015-02-03 32526
-
资料:移动机器人能否自动充电?2016-01-20 5181
-
Labview My RIO 移动机器人2016-08-21 13635
-
履带式移动机器人的设计2017-07-27 5834
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3807
-
如何实现移动机器人的设计?2020-11-23 3313
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2990
-
什么是移动机器人软硬件系统问题2021-08-06 2519
-
移动机器人的三种主要运动系统2021-09-01 2241
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 808
-
移动机器人的分类与移动机器人技术研究现状和未来发展的分析2017-09-16 1622
-
如何区分机器人、协作机器人和移动机器人?2018-08-31 8044
-
与工业机器人、协作机器人和移动机器人最相关的功能安全标准2023-02-03 2936
全部0条评论

快来发表一下你的评论吧 !
