

工业机器人安全标准ISO 10218的变化
描述
取消强制性的 CAT 3 或高频交易=1 要求
ISO 10218-1:2011 5.4.2 要求“控制系统的安全相关部件的设计应符合 ISO 3-13849:1 中描述的结构类别 2006 的 PL=d,或者符合硬件容错为 2 的 SIL 1”。实际上,您需要具有单一容错能力,通常这是通过冗余或在某些情况下通过理想的故障检测来实现的。
新的修订版 3 将允许第三种选择,无需架构要求,前提是 PFHd 位于 PL d/SIL 2 范围的下半部分(完整安全功能为 <4.43e-7/h)。使用机电解决方案的旧技术将无法从这种放松中受益,但我认为强制性的CAT 3或HFT=1要求不适用于基于高度集成技术和半导体技术的系统,例如ADI的新型磁性传感器(在此处查看以前的博客)甚至我们的新型3D TOF相机(在此处查看以前的博客)。).对于相机,IEC 3的Type 61496要求仍然是一个问题。然而,我对强制性高频交易和CAT要求的反对早于这些技术,例如见这里。在我看来,ISO 13849和IEC 61508都表明了PL或SIL所需的安全水平,设计人员不应因坚持给定的架构而受到限制。
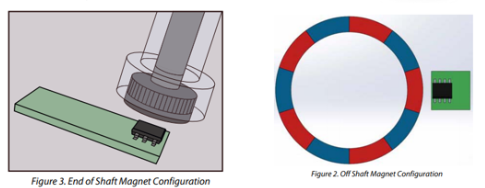
图 1 - 应受益于宽松架构要求的新技术包括用作编码器的 AMR、TMR 和 GMR 传感器
网络安全
我坚信,如果你没有安全感,你就不安全。此外,对于机器人来说,网络安全攻击可能不仅会影响机器人的安全,还可能是摧毁机器人甚至降低成品质量以破坏使用机器人的公司声誉的攻击。
较旧的2011版本没有提到网络安全,但新版本要求在发现威胁时向机器人添加网络安全评估和功能。该标准内容丰富地提到了ISO TR 22100-4:2018,IEC TR 63074:2019和IEC 62443系列工业网络安全标准。
就我个人而言,我喜欢IEC 62443,并且多年来一直是ISA99的大多数非参与成员。对于大多数机器人来说,我认为最佳点将是SL(安全级别)2,可能对SL 3有一些要求。如果可以远程访问机器人,SL 3 可能更合适。
| 安全级别 | 汤姆对您在每个SL中受到保护的描述 |
| 1 | 在工作中感到无聊的人 |
| 2 | 有人认为如果他们能让机器人跳舞会很酷,并且从SL 1描述中了解机器人的更多信息 |
| 3 | 了解工业自动化系统、机器人和网络安全并可以使用一些软件工具来坚持黑客攻击的人 |
| 4 | 敌对政府 |
2021年,ADI公司收购了Maxim Integrated,随之而来的是一个非常好的安全产品系列,包括DS28C50等安全认证器,这将有助于为一些新的安全特性提供解决方案。这将有助于保持我对机器人网络安全的兴趣。
联网
如今,许多机器人将联网到遥控器、PLC 或外部传感器。此外,机器人内部还有一个网络,控制器板与各个轴控制器和末端执行器进行通信。如果这些网络传输安全数据,则ISO 10218中没有给出指导。ISO 3-10218:1X(希望/肯定是202)2023.5.3的修订版6参考IEC 61508-2:2010 7.4.11。IEC 61508中的该条款允许将网络实现为白色通道(所有内容均按照IEC 61508开发)或黑色通道(使用两端带有SCL(安全通信层)的标准组件)。此外,ISO 10218 还为您提供有关网络类别的指导。网络类别来自铁路网络标准 (IEC 62380/EN 50159),根据网络的开放程度,调节您需要使用的工作来抵御通常的威胁。虽然从机器人安全标准中引用铁路标准似乎不寻常,但IEC 62380是IEC 61508中给出的两个选项之一,并且包含更知名的IEC 61784标准中没有的指南,例如网络类别。
大多数网络可能会使用如下所示的黑色通道概念,并在两端的 SCL 中实施防御。
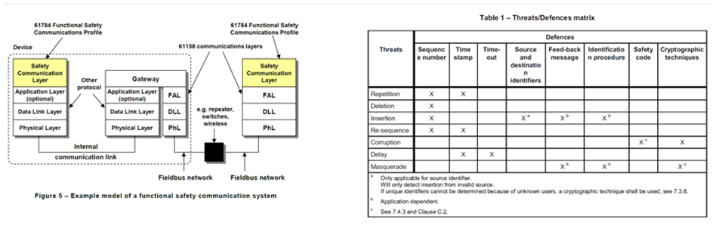
图2 - 黑色通道和威胁防御表示例
由于访问受限、已知成员数量等,内部机器人网络可能被视为第 1 类网络,因此,虽然可能需要大力实施防止腐败,但用于防范其他威胁的努力可能较少。
将机器人连接到外部PLC的网络可能符合2类网络的定义,与1类网络相比,需要额外的努力来防止重复,删除,插入和延迟。
审核编辑:郭婷
-
探讨工业机器人的安全级数据通信问题2026-07-16 405
-
工业机器人的特点2025-07-26 4568
-
与工业机器人、协作机器人和移动机器人最相关的功能安全标准2023-02-03 3007
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5495
-
工业机器人应用编程考核设备分享2021-07-01 2942
-
工业机器人的技术原理2018-11-23 5133
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4156
-
如何保障桁架机器人的安全2018-09-29 3183
-
工业机器人应用广泛2017-09-07 3787
-
六轴工业机器人的主要特点2017-08-08 6714
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 14504
-
工业机器人经典好书籍——《工业机器人》2015-02-03 32652
-
工业机器人的基本结构2015-01-19 9613
全部0条评论

快来发表一下你的评论吧 !
