

 拓尔微技术干货 | 细分驱动技术介绍,内含5个知识点
拓尔微技术干货 | 细分驱动技术介绍,内含5个知识点
描述
本期我们对步进电机驱动原理、五线的步进电机和四线的步进电机、2-2相励磁和1-2相励磁、步进电机驱动的优化方案、拓尔微TMI8150B细分驱动技术的原理进行详细的介绍,共分为5个知识点,全是技术干货,赶紧get下来~
✔get 1:步进电机驱动原理
网络摄像机里用到的步进电机,也被称为步进减速电机。内部带有减速机构,由于减速齿轮的存在,电机转速一般不高,但扭矩却得到了提升。适用于对转速要求不高,但整体结构负载偏大的场合,如网络摄像机。
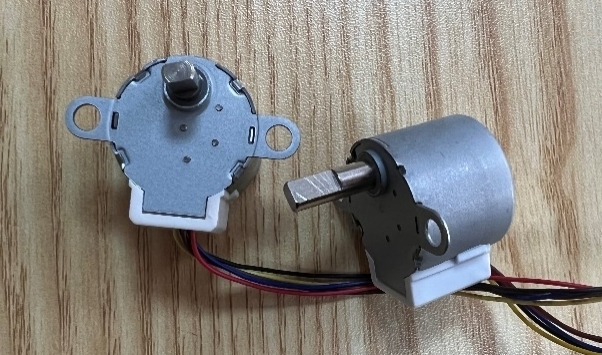
步进减速电机
✔get 2:五线的步进电机VS四线的步进电机
网络摄像机里用到的步进减速电机分为两种,最常见的是五根线的步进电机和四根线的步进电机。下图为五线步进减速电机外形图及接线示意图,五线电机多出的一根线是公共电源线,接到外部的5V或者12V电源,这根线从电机内部的两个线圈的中间抽头引出,并短接在一起。
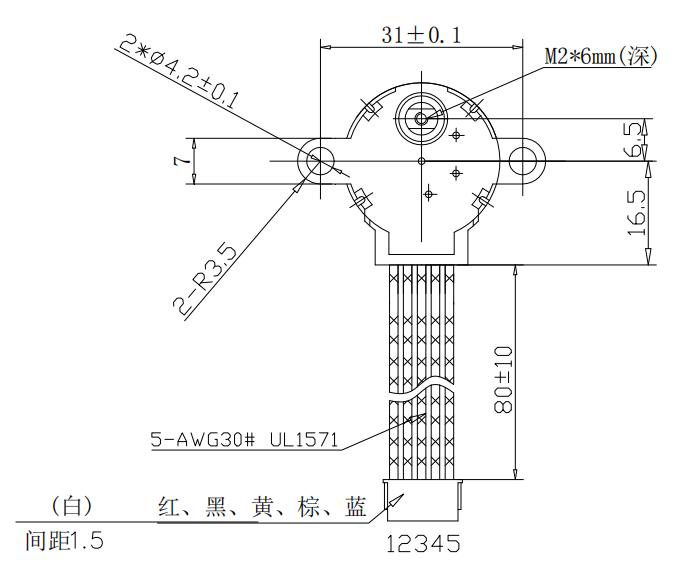
五线步进减速电机外形图
四线步进减速电机接线示意图
四线的步进电机,厂家一般会在规格书上推荐用2-2相励磁的方式进行驱动;而五线的步进电机则会建议使用1-2相励磁的方式来驱动,接下来就详细谈谈这两种驱动方式~
✔get 3:2-2相励磁 VS 1-2相励磁
每一步都是两个线圈同时励磁,故被称为2-2相励磁。线圈磁场方向也就是电机受力方向与电流方向存在固定的角度对应关系,因此电机的受力方向可以转换成电流矢量合成图来表示(见下图)。该图展示的是一个电气周期/驱动周期内电流矢量的变化情况,A相电流和B相电流分别影响两个不同方向分量的力矩。
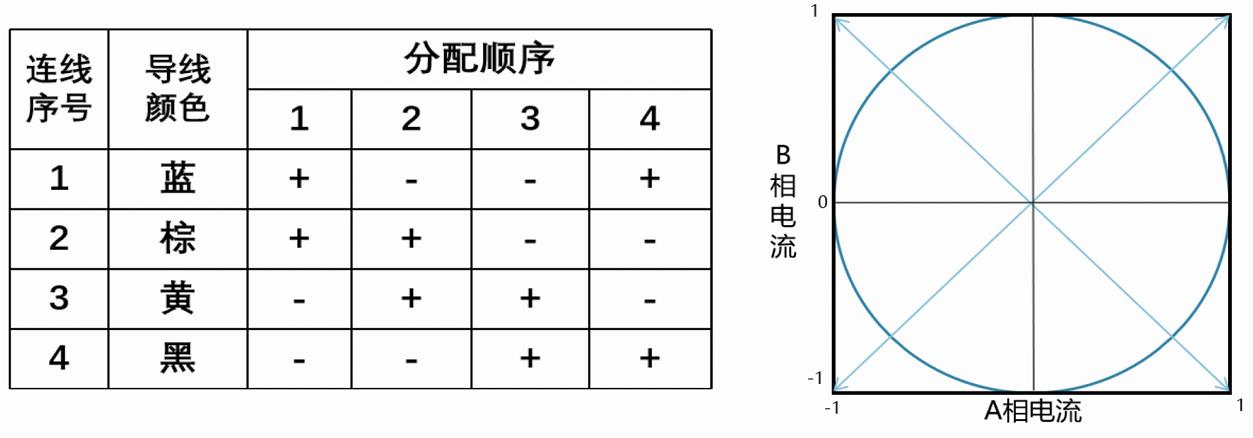
2-2相励磁驱动的励磁顺序表 / 电流矢量合成图
在初始时刻,A相电流和B相电流同时为正,电流合成矢量指向STEP1,电机的转子被吸引至STEP1方向上;
再下一步,A相电流由正变负,电流合成矢量指向了STEP2,电机转子也被吸引至STEP2方向上,电机就转动了一个步距角。
再下一步,A相电流保持负,B相电流由正变负,电流合成矢量指向STEP3,电机转子被吸引至STEP3方向上,电机再次转动一个步距角。
以此类推,不断的改变A、B相电流的方向,即可让转子持续的转动。转子转动4个步距角之后,又会回到STEP1的方向上,整个电气周期共4步,被称为四拍驱动。
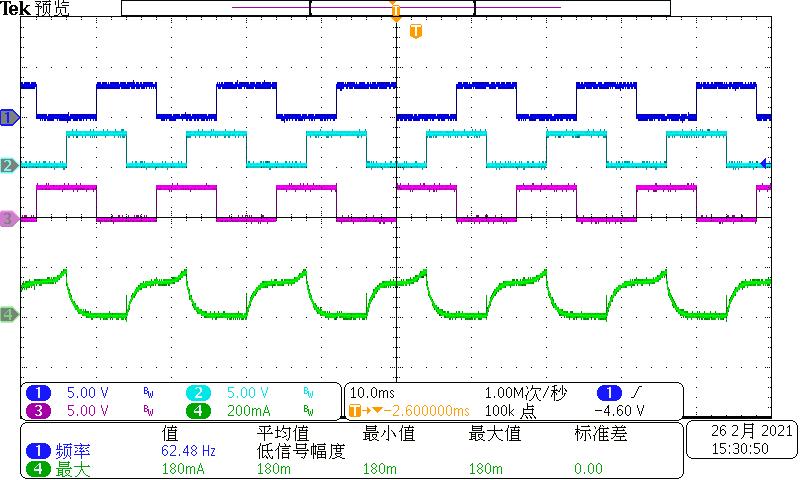
下图为2-2相励磁的实测波形,可以看出线圈电流是正负交替变化的。
2-2相励磁的实测波形
1-2相励磁相较2-2相励磁,多了单个线圈独立励磁,因此被称为1-2相励磁。
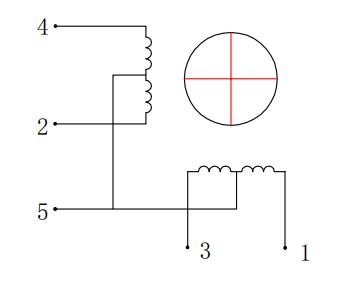
下图是1-2相励磁的励磁顺序表,对于五线的步进电机,电机线圈结构会有些许差异,但驱动步进电机的核心原则是不变的,原本一个可以产生两个相反方向磁场的线圈被拆分成了两个单极性线圈,分别产生两个方向的磁场。
通过控制四个线圈的电流通断,来控制电流合成矢量的方向,让电机转动。在这种驱动方式下,一个电气周期共八拍,也被称为八拍驱动。
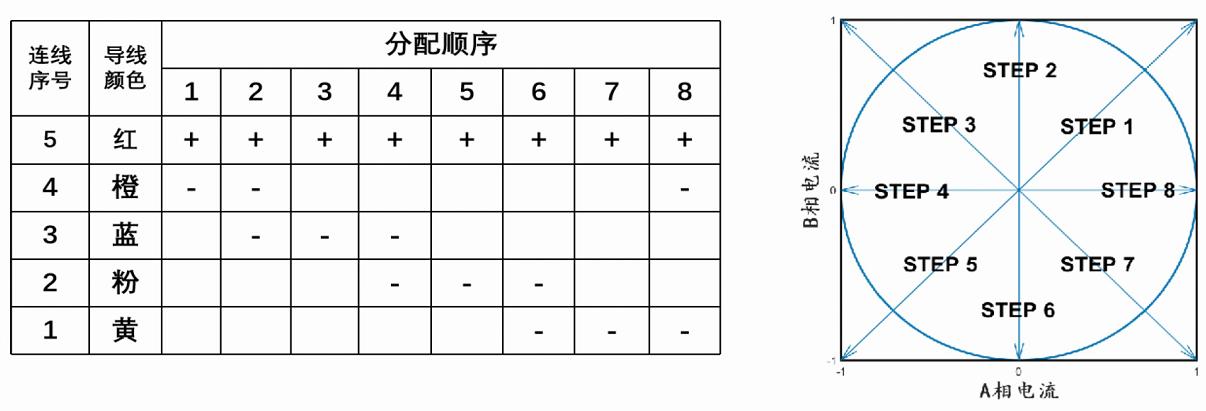
1-2相励磁的励磁顺序表 / 电流矢量合成图
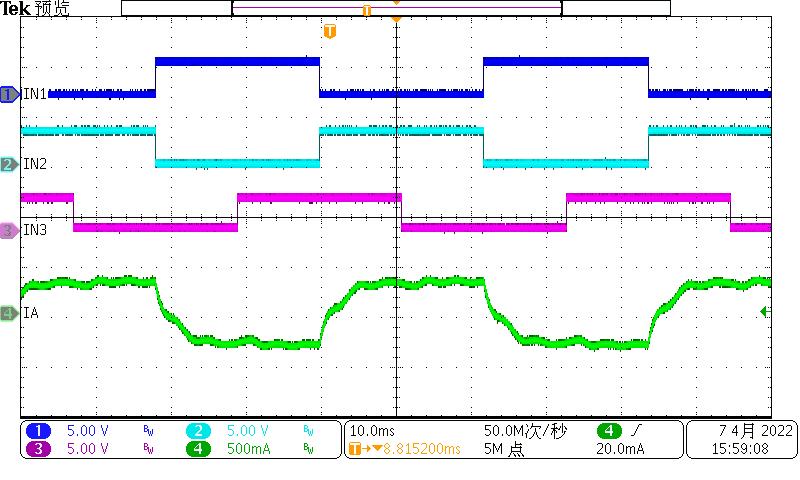
下图是用低侧开关驱动五线步进电机的实测波形,可以看到端口流出的电流始终只有一个方向。
低侧开关驱动五线步进电机的实测波形
看到这里,小伙伴应该对步进电机驱动方式有所了解了吧~接下来进一步讲述步进电机驱动的优化方案——
✔get 4:步进电机驱动的优化方案
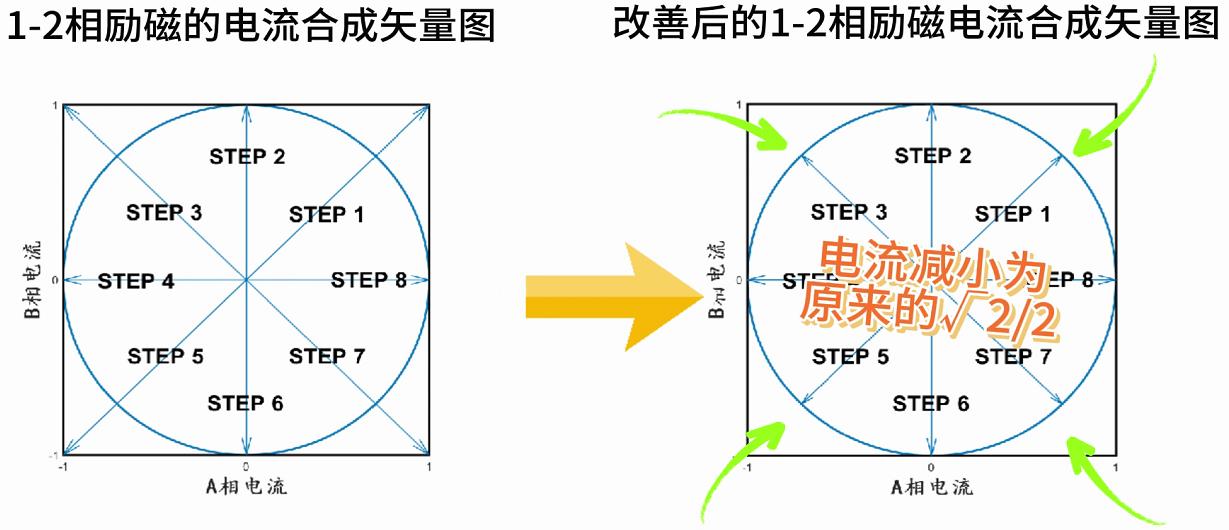
左图为1-2相励磁的电流合成矢量图,可以看出电流合成矢量的幅值是会变化的,意味着电机的转矩也在不断变化,这会导致电机运转的不平滑。为了保证转矩的稳定,除了正确的方向之外,还需要对线圈电流的大小进行控制。
右图为改善后的1-2相励磁电流合成矢量图,将STEP1、3、5、7时候的A、B相电流大小,减小为原来的√2/2。通过这种方式可以让电流合成矢量始终位于单位圆上,保证了转矩的稳定。
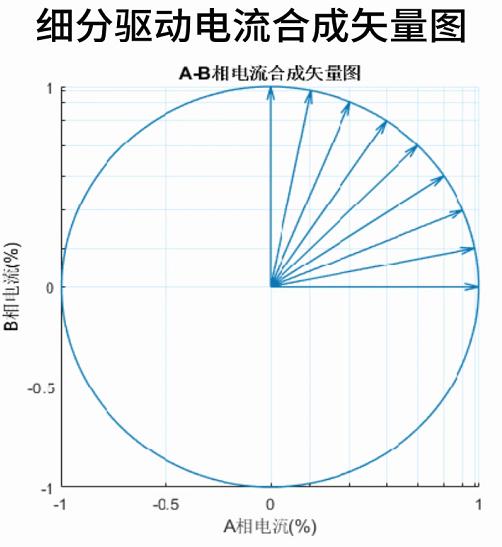
假设在这个基础上,再对步与步之间的角度进行平均,得到更小的布局角,这就是细分驱动。其前提就是要保证转矩的稳定和步距角的一致。
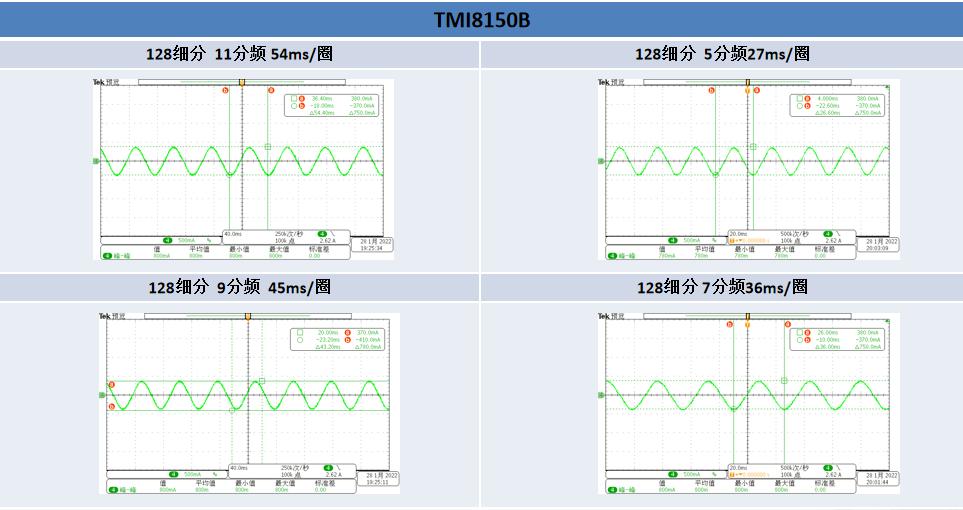
✔get 5:TMI8150B 128微细分完美适配IPC低速驱动需求
拓尔微TMI8150B内置细分控制逻辑,通过精确的控制每一相电流,可以实现最高128细分的步进驱动,5V小电机基本适配。通过细分控制,可以减小低速下电机在每一步停留的时间,改善步进电机的低速抖动问题,减小噪音的发出。
同时可以提高角度分辨率,让步进电机以更小的步距角转动,相对于常见的2-2相励磁,128细分下,电机的角度分辨率提高了128倍!
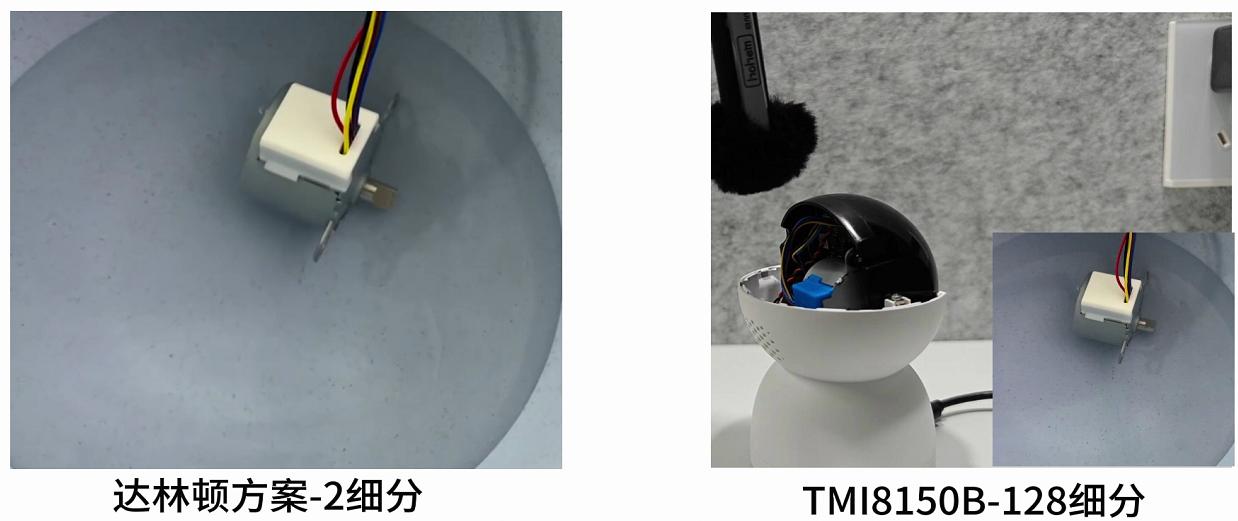
以TMI8150B作为驱动方案的网络摄像机,相较于传统的网络摄像机有着更为出色的转动特性!左图达林顿方案噪声大,抖动明显;右图TMI8150B方案噪音小,低抖动,运转平滑;(详见视频噪音对比)
通过对知识点的科普和技术原理的讲解,让大家对步进电机驱动和细分驱动有所了解,以上就是我们本期的技术干货介绍啦,记得做笔记哦~
审核编辑 黄宇
-
【干货】拓尔微按摩椅应用产品方案指南2023-06-14 2590
-
Linux文件系统知识点详解2023-11-02 1706
-
电机与电气控制基础的知识点2021-01-22 1643
-
NFC技术基础知识点总结的太棒了2021-05-21 2526
-
介绍一下步进电机的细分控制知识2021-07-07 1715
-
求大神分享光电技术与光纤基础知识点2021-10-12 1891
-
PWM知识点详解2017-03-16 2002
-
关于信号完整性的31个知识点汇总2018-06-05 1472
-
60个电工常见易错的技术知识点要点!2019-07-12 6360
-
C语言学习入门知识点/干货2019-07-18 7194
-
干货分享:有关电机的常用知识点2020-10-30 2149
-
数字电子技术重要知识点汇总2022-07-06 1479
-
17个PCB布局的知识点2022-07-10 964
-
OFDM技术知识点2023-11-18 934
-
模拟电子技术知识点问题总结概览2024-05-08 2958
全部0条评论

快来发表一下你的评论吧 !
