

协作机器人 - 安全额定监控停止
描述
本博客的主题是机器人安全标准ISO 10218中的安全级监控停止。
安全等级的监控停止不需要断开驱动器电源,但需要监控停止,即检查运动。实际上,它是IEC 2-60204的1类停止和IEC 61800-5-2的SOS。
ISO TS 15066 为 ISO 10218:2011 提供了关于在协作应用中使用机器人的额外指导。本指南正在纳入ISO 10218:202X。
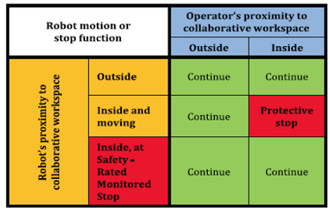
图3 - ISO TS 15066中SSM的真值表
综上所述,如果没有人在场,机器人可以进入协作工作空间。当没有人在场时,机器人可以操作,但一旦有人进入该区域,机器人就必须停止。在以后的博客中,我将介绍与安全级人体存在检测相关的标准,包括IEC 61496和IEC 62998系列。
安全等级的监控停止协作应用程序使用保护停止,这与紧急停止不同。以下是各个站点的摘要。
正常停止 –顾名思义,每台机器都应该有一个停止控制,停止优先于任何启动。此控件的使用很频繁,根据IEC 0-1,停止将是类别60204或1停止 <>。
保护性停止 –通常由激光扫描仪、3D TOF 相机或光幕启动。为了降低风险,激活频率不高。它的重置(即允许再次移动)可以是自动的。允许类别 0、1 或 2。
紧急停止 –这是由红色和黄色大按钮启动的停止。它的启动是手动的,它的重置是手动的,其目的仅用于紧急使用。仅允许类别 0 或 1 停止。有一个完整的标准,ISO 13850,专门用于紧急停止的设计。
ISO 10218-1:2011 5.3.8.1 强制要求必须具有紧急和保护性停止输入。
在工业之外也有类似的问题,ISO 13842具有以下特点。
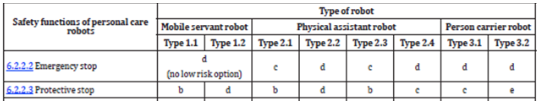
图4 - 个人护理机器人停止功能的性能水平
一个有趣的问题是,停车是否真的会造成危险。例如,移动机器人(AGV,AMR,AIV,工业卡车......)停止阻塞消防出口,或者在外面工作时阻塞轮椅使用者的坡道,或者在人行横道/人行横道上停车,阻碍行人并最终阻碍交通。在任何现实生活中的危害分析和风险评估中,所有这些都需要考虑。
当机器人根本没有施加动力时,运动呢?这可能是由于重力或有人物理移动机器人手臂。
审核编辑:郭婷
-
大负载协作机器人的应用场景2023-06-19 2221
-
与工业机器人、协作机器人和移动机器人最相关的功能安全标准2023-02-03 2936
-
基于Matlab的开源六自由度协作机器人实验平台2021-09-07 1602
-
什么是协作机器人?协作机器人如何选择2020-12-29 8377
-
协作型机器人的应用类型2020-12-01 3095
-
协作机器人是什么_协作机器人应用前景2020-08-18 6004
-
“协作机器人”如何快速处理传感器数据2020-08-05 4153
-
协作机器人的起源_为什么需要协作机器人2019-07-07 9561
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
协作机器人伺服和传感器核心器件揭秘2018-10-12 3905
-
如何保障桁架机器人的安全2018-09-29 3161
-
机器人VS人:替代还是协作?2018-09-20 3596
-
基于结构自适应的多机器人协作机制研究2012-08-20 2774
全部0条评论

快来发表一下你的评论吧 !
