

永磁同步电机控制系统仿真—逆变器的死区补偿
工业控制
描述
01 死区效应的产生
死区效应,准确说应该叫逆变器的非线性特性,由两部分构成:
- 死区时间;
- 功率器件的导通压降;
其会导致逆变器输出电压与PWM指令不相等。在电机低速工况时和高速六阶梯波模式下,为了保证系统的性能,必须对PWM的死区时间进行补偿。特别是,当电流的幅值几乎为零时,由于死区效应,即使在该相有一些电压指令参考,电流也被钳制为零。
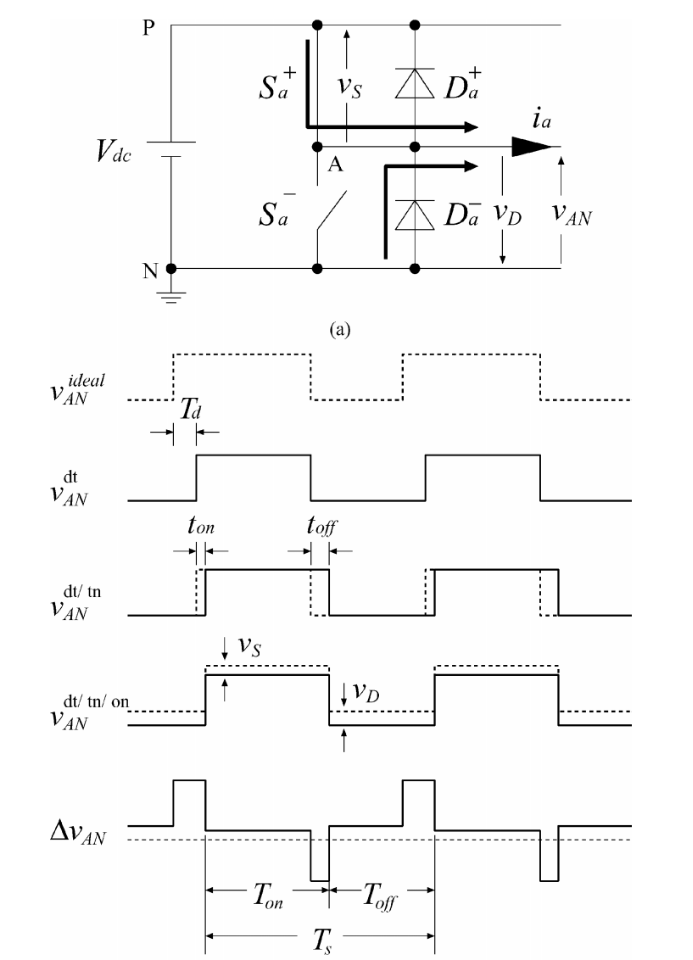
电流流出时,逆变器理想输出电压与实际输出电压之差
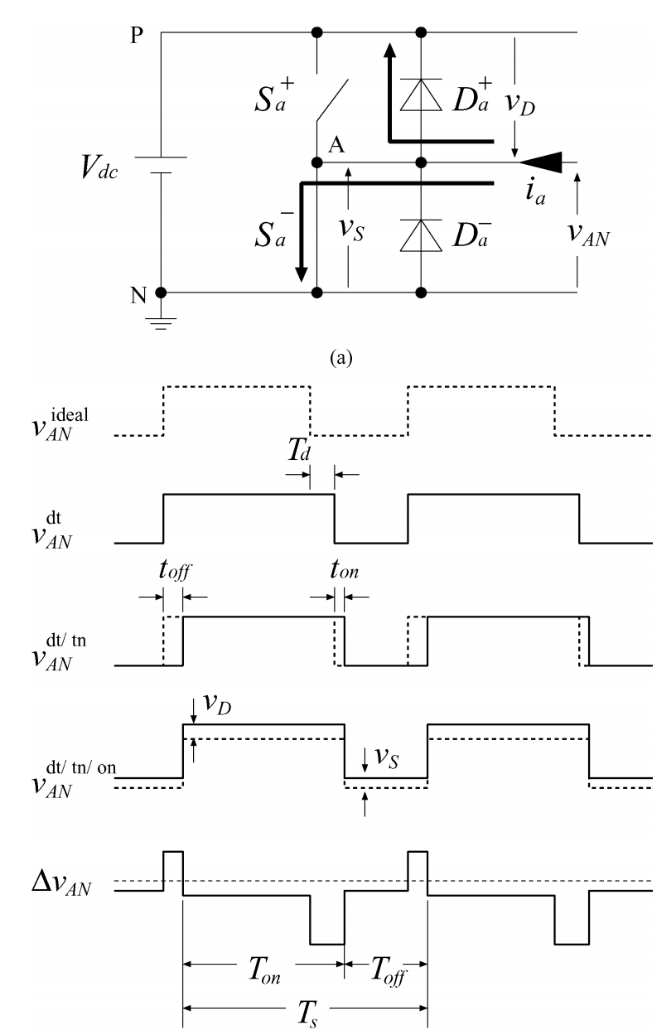
电流流入时,逆变器理想输出电压与实际输出电压之差
02 死区补偿方法
针对不同的应用要求,死区补偿的方法有很多种,实现的难易程度和成本也各不相同。下面介绍一种行业中广泛使用且容易实现的一种方法。
首先分析死区时间,根据三相电流的流向可以得到每相逆变器理想输出电压与实际输出电压之差
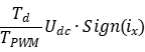
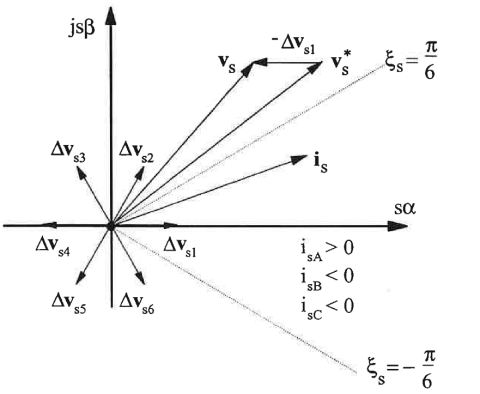
式中Td为死区时间,TPWM为PWM周期,Udc为直流电压,Sign为符号函数,ix为电机电流。将每相的电压误差通过Clarke变换,死区效应引起的电压误差可以在三相坐标系中表示为六个电压误差矢量  ,如下图所示。例如,当电流矢量is在-π/6~π/6范围内,a相电流大于零,b相和c相电流小于零,计算得到电压误差矢量
,如下图所示。例如,当电流矢量is在-π/6~π/6范围内,a相电流大于零,b相和c相电流小于零,计算得到电压误差矢量

其导致的实际输出电压由V*s 变为Vs。
由于死区时间导致的实际输出电压
因此其补偿的基本原理是考虑电流的极性,通过增加压误差矢量,补偿参考电压V*s,使逆变器输出电压与指令电压一致。
实现框图如下:

死区补偿实现框图
实际应该时,可以根据实际情况,标定电压误差矢量的补偿系数。
03 HIL测试结果
搭建电机控制器桌面式HIL测试平台,如下图所示。包括:
上位机:在线参数修改,实时波形监视与记录;
示波器:波形显示;
Performance实时仿真机(包含IO334 FPGA板卡和IO3XX-21数字扩展板):运行被控对象模型。
Baseline实时仿真机(包含IO397 FPGA板卡):运行电机控制器模型。
旋变调理卡:将2路单端模拟信号转换为2路差分模拟信号,以及线圈阻抗等效。
旋变解码卡:输出旋变激励信号,测量PMSM的位置和速度。

电机控制器桌面式HIL测试平台
定子频率5Hz,开关频率20kHz,死区时间2µs,示波器的电流波形如下:
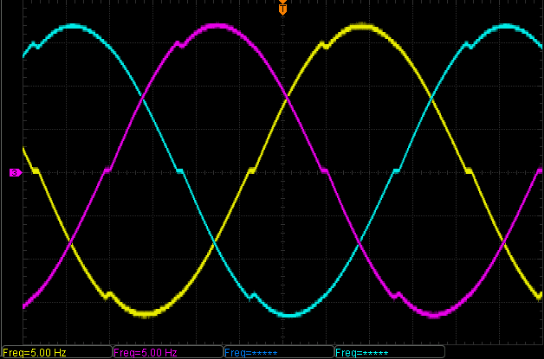
电流波形(无死区补偿算法)

电流波形(有死区补偿算法)
-
永磁同步电机控制系统仿真—逆变器的死区补偿2023-06-21 4593
-
永磁同步电机扇区计算分析2021-08-27 2602
-
太实用!永磁同步电机控制方案及MATLAB仿真模型大全2020-06-30 10280
-
永磁同步电机控制系统的模型建立和仿真资料说明2019-11-28 2457
-
现代永磁同步电机控制原理及MATLAB仿真电子书2018-03-27 23329
-
永磁同步电机驱动系统逆变器死区补偿2017-12-28 1197
-
基于STM32的永磁同步电机控制系统2017-09-25 1382
-
永磁同步电机伺服控制系统建模与仿真2017-05-20 1443
-
永磁同步电机控制系统+陈荣着2017-02-17 2257
-
永磁同步电机直接转矩控制系统的研究2017-01-21 1093
-
基于DSP的永磁同步电机交流伺服控制系统2016-04-18 898
全部0条评论

快来发表一下你的评论吧 !
