

西门子SCL编程实例—气缸控制函数块
电子说
描述
气缸是工业现场使用较多的一种执行器,它使用压缩空气作为动力,有两个进气孔,通过控制进气与排气,推动气缸往复运动。一些安全系数较高的气缸还配有抱闸。默认情况下抱闸闭合,气缸不能运动。在通入压缩空气后抱闸打开,气缸可自由运动。今天这篇文章我们来编写一个用于控制气缸往复运动的函数块——FB5022_Cyclinder,它也可用于液压缸的类似场合。
函数块FB5022_Cyclinder有如下一些特点:
支持自动模式和维护(手动)模式。在自动模式下,气缸会运动某个指定的时间,直到时间到达或者触发前进/后退到位反馈信号;在维护(手动)模式下,气缸运动跟随按钮信号,按下按钮运动,松开按钮停止;
气缸运动时会使能抱闸松开信号;
当同时触发前进/后退请求或者前进/后退的到位信号时,会报告错误;
下面我们来编写函数。
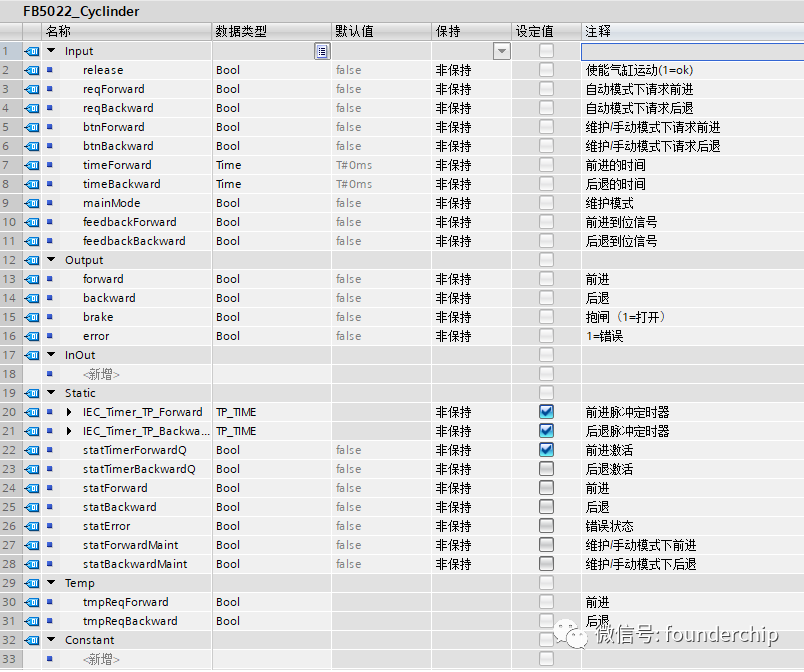
打开博途开发环境,新建函数块FB5022_Cyclinder,添加变量如下图所示:
 其中:
其中:
①输入参数:
release:布尔型, 1=使能函数块;
reqForward:布尔型 ,在自动模式下请求前进;
reqBackward:布尔型,在自动模式请求后退;
btnForward:布尔型,维护(手动)模式下请求前进;
btnBackward:布尔型,维护(手动)模式下请求后退;
timeForward:时间型,自动模式下前进的最长时间;
timeBackward:时间型,自动模式下后退的最长时;
mainMode:布尔型,1=维护/手动模式;
feedbackForward:布尔型,前进到位反馈信号;
feedbackBackward:布尔型,后退到位反馈信号;
②输出参数:
forward:布尔型,前进;
backward:布尔型,后退;
brake:布尔型,抱闸输出控制(1=松开);
error:布尔型,错误(1=有错误)
③静态变量和临时变量:
IEC_Timer_TP_Forward和IEC_Timer_TP_Backward是添加定时器指令时自动生成的多重背景数据块变量;
其它变量请看图中解释;
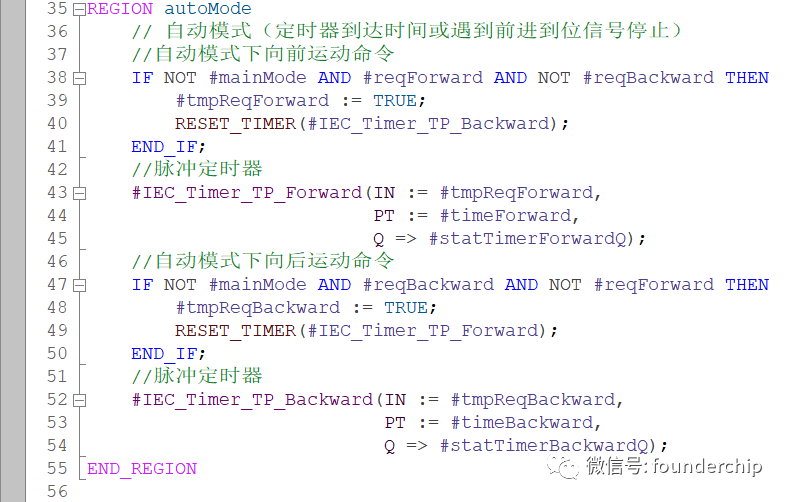
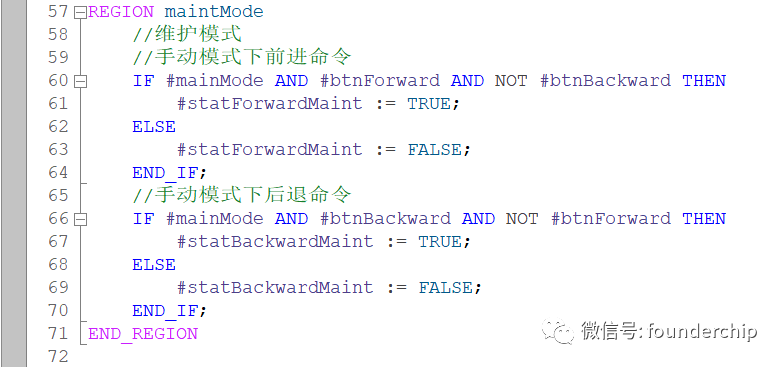
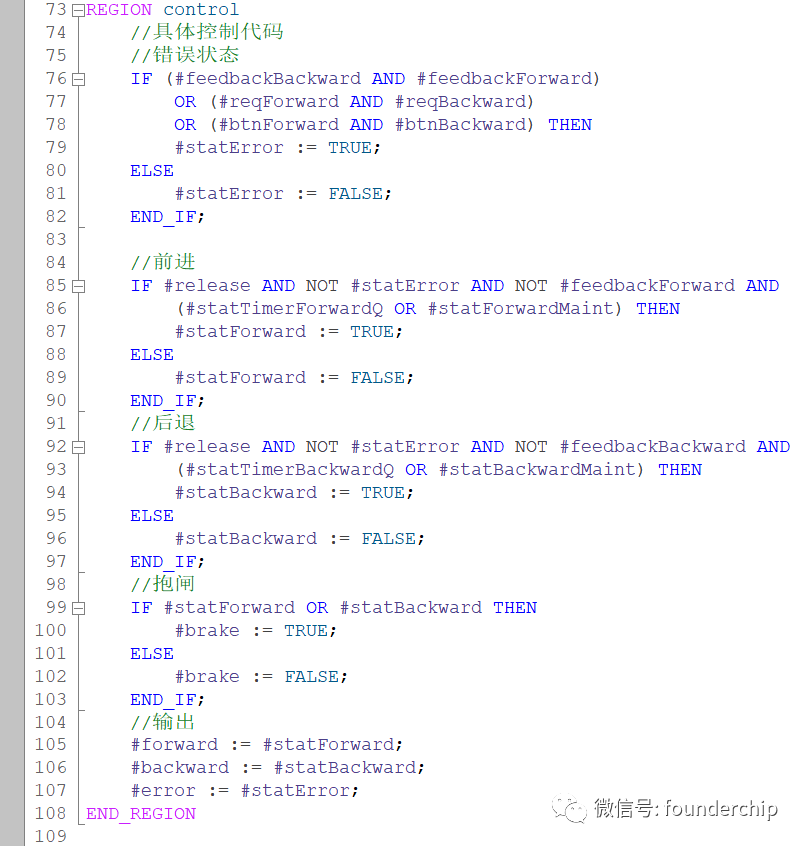
为了便于阅读,我将代码分成了三个区域:自动、维护(手动)和控制,请看下面的图片:
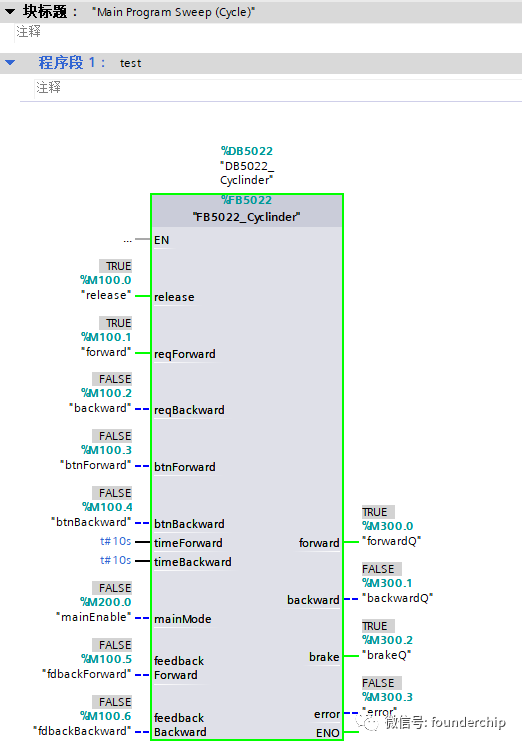
在OB1中调用该函数块进行测试,如下图所示:
审核编辑:刘清
-
西门子TIA Portal中函数FC和函数块FB的相互转换2025-01-15 3977
-
SIMATIC S7-1500 PLC S7-SCL SCL块详解2023-12-06 2465
-
西门子SCL编程实例——周期性运行(更新版)2023-11-07 2124
-
西门子博图中带有背景数据块的基本指令不同实例的区别和应用2023-05-09 15656
-
西门子S7 SCL编程知识2023-04-19 1382
-
西门子PLC编程软件功能及安装2023-04-17 1727
-
西门子SCL语言编程系列-写立方根FB块2023-02-06 3642
-
西门子PLC(可编程逻辑控制器)编程实例项目例程2022-03-22 1668
-
西门子TDC编程语言CFC功能块详细说明中文版2021-04-30 4869
-
浅谈西门子SCL编程2021-04-23 1769
-
西门子S7-200 PLC编程实例精解2021-04-22 4968
-
浅谈西门子PLC的“SCL语言”编程2016-01-22 2102
全部0条评论

快来发表一下你的评论吧 !
