

全天时单光子激光雷达技术进展与系统评价
描述
单光子激光雷达(又称为光子计数激光雷达)具有单光子量级的探测灵敏度,相比于传统的线性探测激光雷达,能够获得更远的探测距离,已经成为激光雷达探测技术的前沿和发展趋势。然而,极高的探测灵敏度也使单光子激光雷达在探测中极易受到背景噪声光子的干扰,这在很大程度上降低了其在白天工作的性能,也极大地限制了其适用范围。
据麦姆斯咨询报道,近期,中国科学院空间光电精密测量技术重点实验室和中国科学院光电技术研究所的科研团队在《红外与激光工程》期刊上发表了以“全天时单光子激光雷达技术进展与系统评价”为主题的文章。该文章第一作者和通讯作者为刘博研究员,主要从事激光雷达探测与激光通信方面方面的研究工作。
该文从单光子激光雷达的探测原理出发,简要回顾了其技术发展,分析了全天时工作对单光子激光雷达探测系统的需求,在此基础上,采用一种新型的光谱滤波技术,极大地提升了单光子激光雷达在白天的探测性能。同时,还提出了一种普适性的评价模型,能够极为直观地对各种激光雷达系统的探测性能进行评价。
单光子激光雷达探测原理
对于激光雷达探测,通用的雷达方程为:
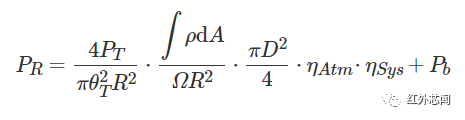
实际探测时,单光子探测器输出脉冲中既包含有信号光子的响应脉冲,也包含有噪声光子的响应脉冲,它们混杂在一起,仅通过单次探测无法区分出信号光子脉冲。考虑到每次信号光子脉冲出现的时刻一致(目标距离不变),而噪声光子脉冲出现的时刻具有随机性,因此TCSPC的统计方法被用于单光子探测中,通过多脉冲累积来提取出淹没在噪声中的回波光子信号。
单光子激光雷达技术发展
1969年,Richard I. Abbot等利用光子计数实现了地球和月球之间的激光测距,之后,多个研究机构都开展了相关研究工作。随着单光子探测器件以及激光器技术的不断发展进步,单光子探测激光雷达技术也得到了蓬勃发展,应用领域不断拓展。从合作目标激光测距到远距离非合作目标探测,从单点探测到扫描三维成像以及阵列式三维成像,探测精度和分辨率不断提高,探测距离不断增大。单光子探测器件也从早期的PMT发展到GM-APD、SNSPD、硅光电倍增管(SiPM)也被称为MPPC,以及最新的H***Te APD,探测性能不断提升。
2002年,麻省理工学院林肯实验室首先完成了第一代4×4 APD阵列的单光子激光雷达,随后发展成为32×32阵列的光子计数激光雷达,目前已经完成领先的256×256阵列的激光雷达。2003年,Richard Heinrichs和R M Marino完成了DARPA资助的Jigsaw计划外场实验,该系统激光波长为532 nm,单脉冲能量为4 μJ,接收光学系统孔径为75 mm,在150 m的距离上实现了空间分辨率为5 cm、距离分辨率为40 cm的光子计数激光三维成像。2012~2013年,美国国家航空航天局(NASA)使用多波束测高试验激光雷达(MABEL)搭载ER-2飞机在20 km高空进行光子计数推扫测量试验,波长为532 nm和1064 nm,单脉冲能量为3~5 μJ,获取了高精度的地表连续高程剖面数据,高精度的云与气溶胶数据以及植被覆盖区域的地物、地表高程模型。2018年,NASA发射了IceSat-2卫星,采用光子计数体制实现的多波束星载激光雷达ATLAS作为其主载荷,同时发射了三对六束激光,波长为532 nm,每对间隔3.3 km,沿轨光斑间隔70 cm,测量地形高度变化小于4 mm,脉冲宽度1 ns,激光重复频率10 kHz,单脉冲能量为25~90 μJ可调。同时期,英国赫瑞·瓦特大学在最远至10.5 km的距离上获取了目标的高分辨率三维图像。
国内也有多个研究团队在单光子激光雷达探测方面开展了卓有成效的研究工作。华东师范大学吴光团队一直致力于各种单光子探测技术的发展;中国科学院云南天文台李语强团队在碎片等空间目标的单光子探测方面工作突出;中国科学院上海光学精密机械研究所在目标探测、海洋测深等单光子探测应用方面开展了大量工作;中国科学院上海技术物理研究所对于单光子线阵扫描激光雷达及信号处理做了相关研究;青岛海洋大学吴松华团队开展了单光子大气探测方面的研究;中国科学院光电技术研究所笔者团队在单光子编码探测技术以及远距离单光子目标探测等方面进行了应用探索;中国科学院西安光学精密机械研究所、华中科技大学、哈尔滨工业大学、南京大学、中国科学院国家空间科学中心、西安理工大学等在单光子成像与探测技术方面开展了各有特色的研究工作。中国科技大学潘建伟团队也开展了单光子探测技术的研究:2020年在***完成了最远202 km的超远距离单光子三维成像,以单像素189 ms的采集的时间,在夜间最终得到了512 pixel×320 pixel分辨率的图像,整个扫描时间约为8.6 h,这是目前公开报道的最远距离的单光子三维成像实验。另外,北京航空航天大学张汉熠等对于单光子激光雷达系统及相关算法等做了较为详细的综述。
随着单光子激光雷达应用领域的不断拓展,全天时工作能力成为必然的需求。基于以上单光子探测原理的分析,系统的探测性能主要取决于背景噪声的抑制能力,具体来说就是降低探测器本身的暗计数以及减少除信号光子外的噪声光子计数。对于探测器的暗计数,目前几种主流的单光子探测器都能做到比较低的水平,比如GM-APD一般为几十赫兹到千赫兹,SNSPD甚至可以达到几赫兹,相对于白天日光引起的背景噪声计数率(一般为MHz量级)来说已经可以忽略不计。因此,单光子激光雷达白天探测性能的提升主要取决于对日光引起的背景噪声的抑制水平。
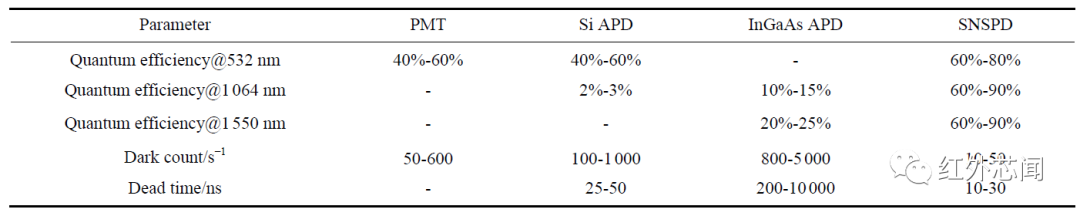
目前,单光子激光雷达一般采用532 nm、1064 nm或1550 nm这三个探测波长,相应的单光子探测器有PMT、Si APD、InGaAs APD、SNSPD几种选择,表1给出了几种探测器的典型参数。
激光雷达系统常用的背景噪声抑制技术包括空间滤波、时间滤波以及光谱滤波。空间滤波主要是在雷达的光学接收系统中采用有效的视场光阑,尽可能地减小系统的光学视场(FOV),但要注意与发射光束相匹配。时间滤波主要是根据目标大致距离,采用尽可能精确的时间门控,摒弃时间门宽之外的光子信号,而实际上TCSPC本身就是一种十分有效的时间滤波技术。光谱滤波是指以发射激光波长为中心,设置尽可能窄的光谱透过带宽,从而滤除接收视场内除信号波长外的其他波长成分,以此到达抑制背景的目的。
单光子激光雷达全天时探测能力分析
光子计数激光雷达的噪声来源主要是背景光噪声以及探测器本身的暗计数噪声,由于暗计数噪声是由器件本身的暗电流产生的,与器件性能有关,这里不作分析。背景光噪声的主要来源是太阳辐射,因此需要对由太阳辐射引起的、最终到达单光子探测器的噪声光子进行分析。
为了简化处理,可以将太阳视作一个温度为5778 K的标准黑体,利用黑体辐射公式可以准确得到某一波段太阳光谱的辐射能量。得到常用的太阳辐射光谱照度图如图1所示。
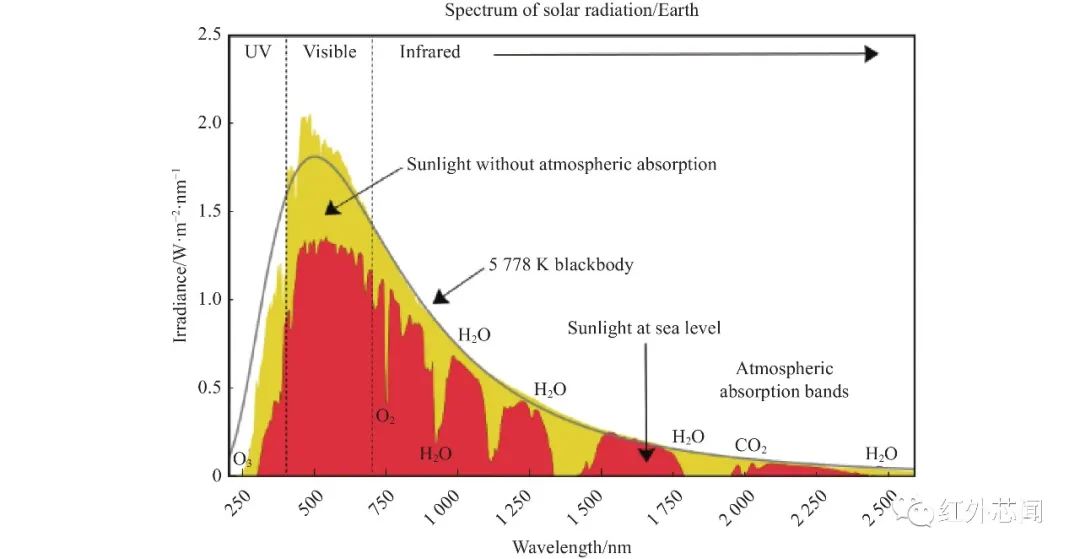
图1 太阳辐射光谱照度
依据黑体辐射公式和太阳辐射光谱,可以得到某一波长的太阳常数,即日地距离上,大气层顶垂直于太阳光线的单位面积在每秒接收到的太阳辐射功率,其随波长不同而变化。在确定激光雷达系统探测波长后,根据系统的光谱滤波带宽以及该波长太阳常数即可计算出该波段范围内的太阳光谱辐射功率。位于雷达和目标之间路径上的大气也会对太阳辐射进行散射,整个路径上的大气散射被雷达光学系统接收也会成为噪声光子,这部分辐射的计算十分复杂,与太阳高度角、目标方位角、路径大气消光系数分布等探测时的具体太阳与大气参数密切相关,难以精确计算。
对于激光雷达用的单光子探测器的选择,由表1可见,SNSPD探测器在可见到近红外波段的综合探测性能上具有明显优势,制约SNSPD的条件主要是其系统需要极低制冷温度(低于4 K),难以实现系统小型化。另外,目前其使用成本过于昂贵,价格约为半导体探测器的10倍以上。不考虑以上因素时,选用SNSPD探测器将显著提升雷达探测性能,下文不再将其列入对比分析。此外,对于532 nm探测,由于PMT量子效率高且无死时间效应,在不考虑其他因素的情况下也应优先选用,下文也不再将其列入对比分析。
表1 单光子探测器的典型参数(基于主流商用探测器参数,来源厂商包括Hamamatsu、Excelitas、PicoQuant、Laser Components、ID Quantique、Aurea、Scontel、Becker & Hickl等)
为了进行探测性能对比分析,选定10 km距离的扩展目标,按照表2中参数计算不同光谱滤波带宽时不同波长和探测器的探测概率。
表2 对比分析用雷达参数表
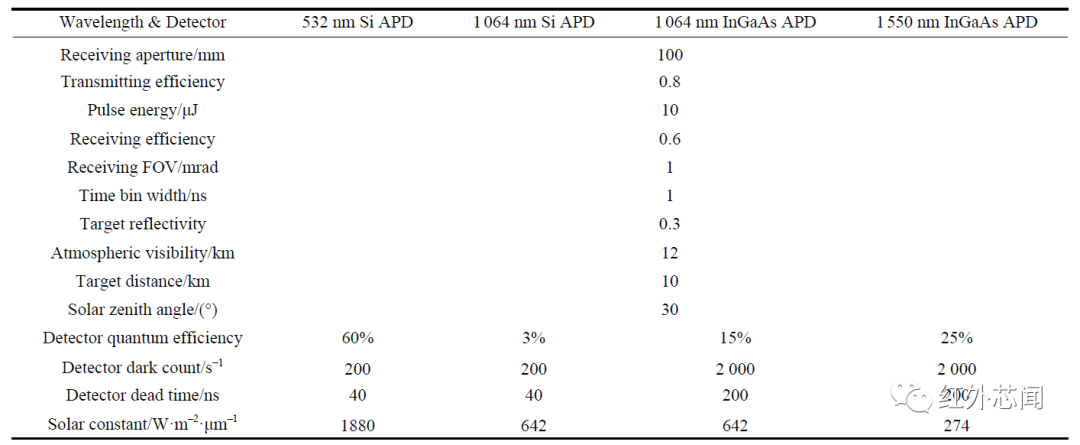
计算中大气辐射采用LOWTRAN软件,夏季中纬度地区标准大气模式,光谱滤波带宽分别选择0.5、1、1.5、2 nm,结果如图2所示。图2(a)为单次探测概率,图2(b)为脉冲累积100次、鉴别阈值为10时的探测概率,图2(a)中还给出了12 km能见度时,10 km距离不同波长的双程大气透过率。由图可见,无论对于哪种波长,光谱滤波带宽都极为重要,带宽2 nm以上白天探测概率急剧下降。虽然532 nm的探测器效率很高,但由于大气衰减以及日光背景较强的影响,其探测性能并不好。而InGaAs探测器由于其死时间过长,导致在强噪声环境下探测性能不佳,因此,虽然1550 nm波长的大气衰减最弱,日光背景最低,但其探测性能仍然不佳。综合来看,白天探测时采用1064 nm波长,Si APD探测器的性能最好,同时光谱滤波带宽需小于2 nm。
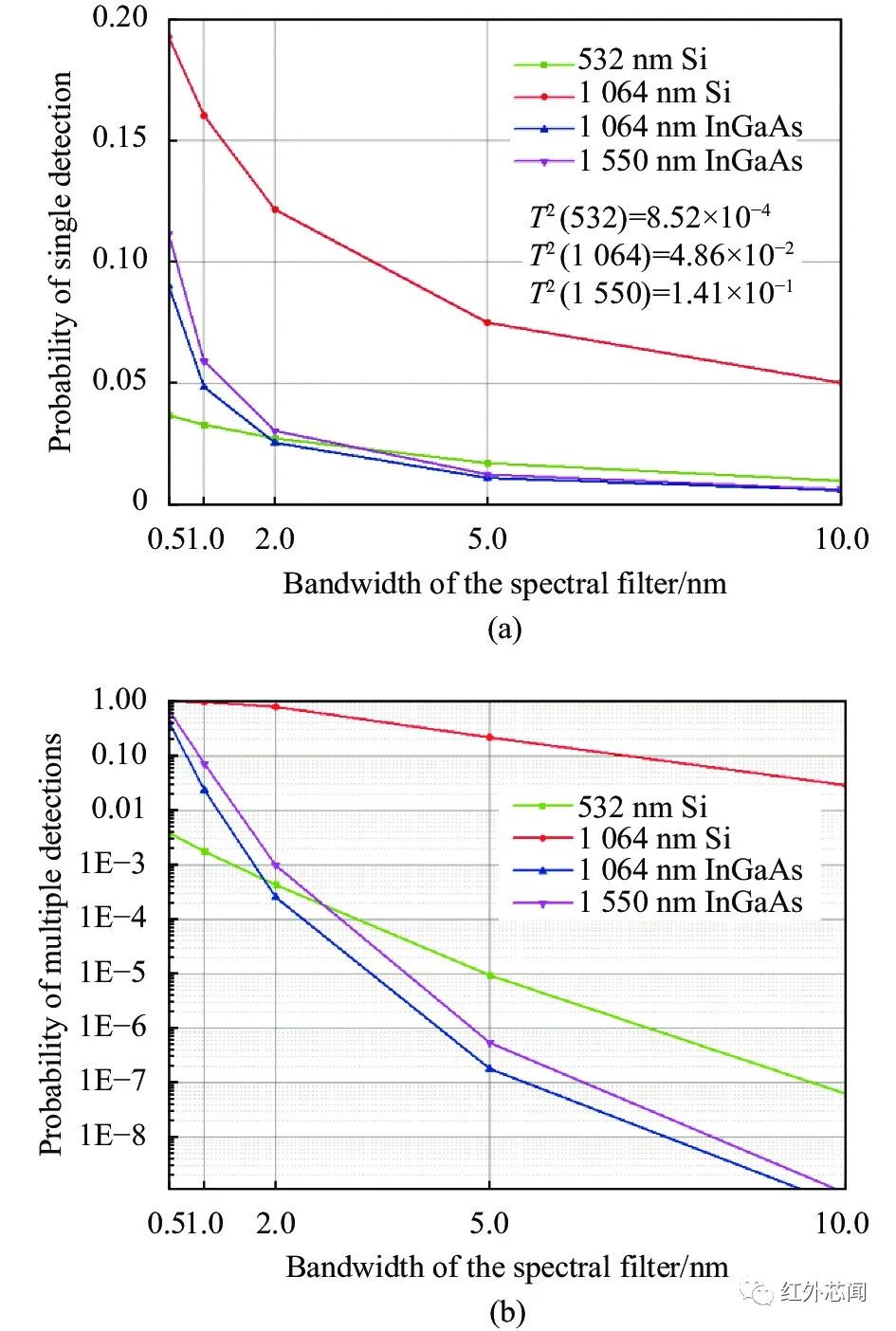
图2 10 km目标不同光谱滤波带宽时不同波长和探测器的探测概率
图3(a)所示为1 nm滤波带宽,1064 nm波长不同探测距离时,单次探测接收到的目标激光回波光子数(红色)、目标散射日光噪声光子数(蓝色)和路径大气散射日光噪声光子数(绿色)。图3(b)所示为几种波长和探测器在不同探测距离上的单次探测概率,红色点线为1064 nm、Si APD探测器在夜晚无日光背景下的探测概率。由图可见,白天受到日光背景噪声的影响,目标的探测概率并不是随距离增大直接降低的,对于扩展目标,在近距离上目标散射的日光噪声为主要影响,甚至会一定程度上导致距离越近,目标探测概率越低,该影响会随距离的增加而降低,而路径大气散射的日光噪声会随距离的增加而增加,并逐渐成为主要噪声源。
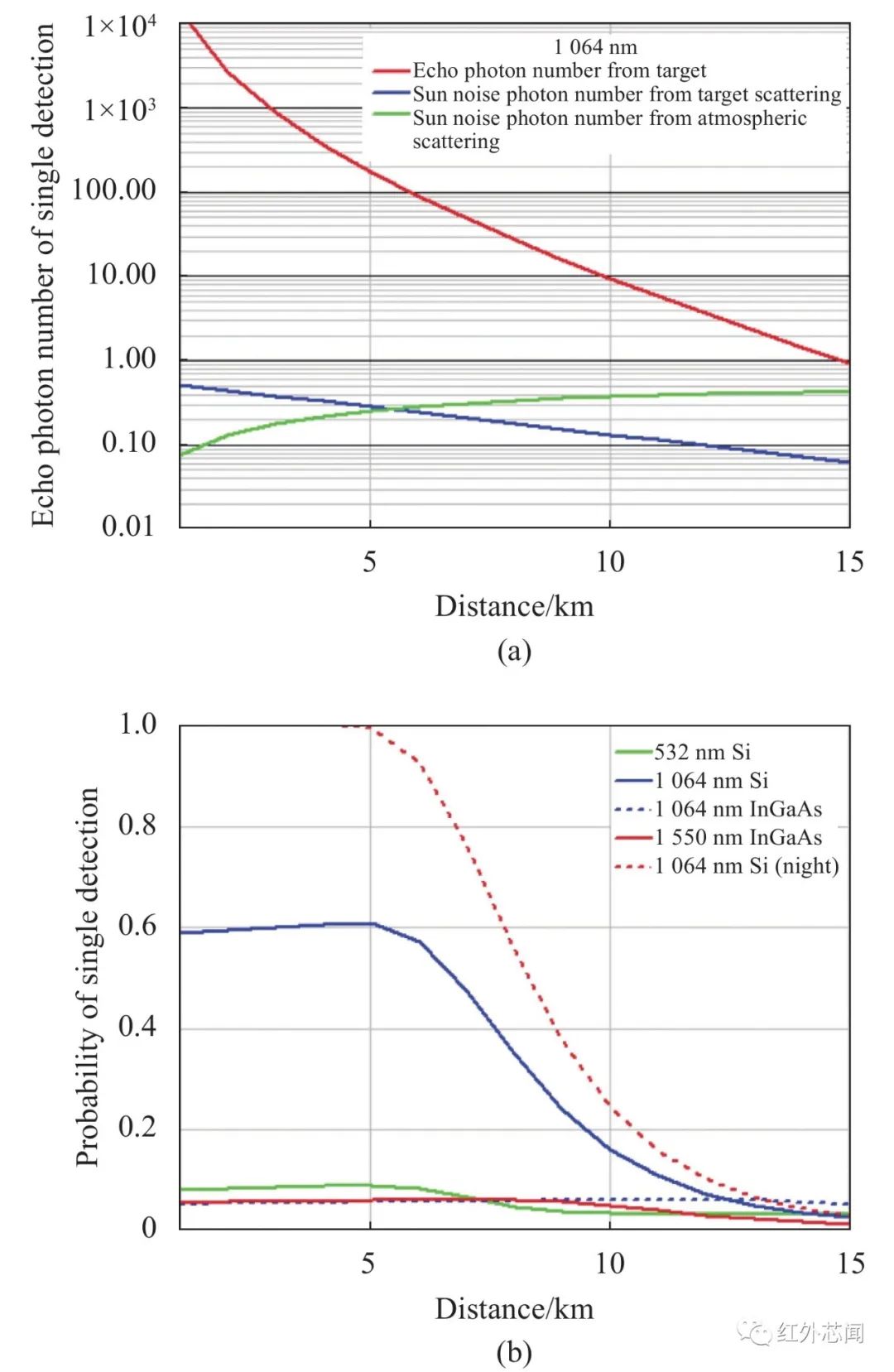
图3 1 nm滤波带宽时不同距离单次探测的噪声信号与探测概率
图4为夜间无日光背景影响时,不同波长和探测器在对不同距离目标的探测概率。由图可见,在无日光背景噪声影响时,探测距离主要受到传输路径大气衰减的影响,1550 nm波长由于大气衰减最弱,可以达到最远的探测距离,1064 nm波长采用InGaAs探测器时量子效率相对Si APD探测器较高,所以探测距离较远。
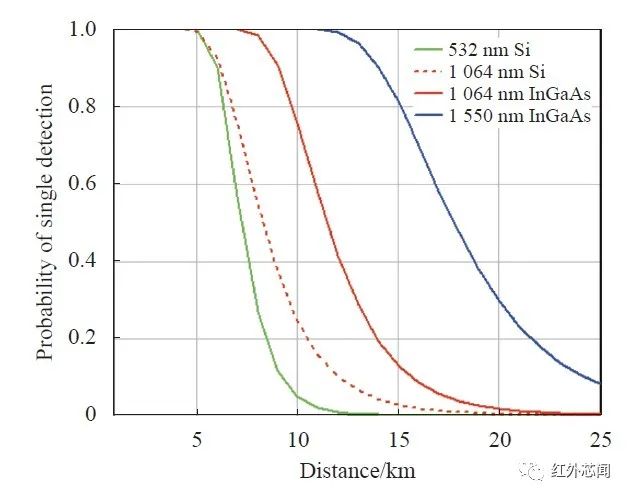
图4 夜间不同波长和探测器在对不同距离目标的探测概率
基于新型滤波器的单光子激光雷达
背景光噪声抑制技术是提升激光雷达全天时工作能力的关键。目前激光雷达系统中采用的光谱滤波技术主要包括窄带干涉滤光片、法布里-珀罗(F-P)标准具、光栅滤波器件、原子滤光器等方法。为了达到更好的背景抑制效果,光谱滤波器件的滤波带宽越窄越好,带外的抑制能力越高越好,同时为了不影响信号光的接收,其中心波长的透过率越高越好。窄带干涉滤光片是目前激光雷达中应用最为广泛的光谱滤波器件,多数窄带干涉滤光片的滤波带宽为0.5~10 nm,透过率为70%~90%,带宽更窄的干涉滤光片制备困难,且透过率会急剧下降;F-P标准具虽然能够达到几十皮米量级的滤波带宽,但是由于其工作原理的限制,导致其对于温度变化和外界震动异常敏感,需要复杂精密的控制,并且其自由光谱范围较小,须与干涉滤光片结合使用,这些都限制了F-P标准具的实际应用;光栅滤波器件在衍射效率及滤波带宽上存在矛盾,且其带外抑制能力不足。原子滤光器一般只能针对特定波长的入射光产生共振从而透过,同时需要外加温度控制以及磁场,使用时有诸多不便。
为了实现更好的光谱滤波,笔者采用反射式布拉格光栅作为核心滤波器件,搭建了一个超窄带光谱滤波系统(UNSFS),该系统滤波带宽约为50 pm,透过率约为85%,中心波长为1029 nm。同时,采用波长为1029 nm的Yb:YAG窄线宽脉冲激光器作为激光雷达光源。1029 nm与1064 nm同处于1 μm波段,大气衰减和日光背景辐射水平相当,但对于硅基单光子探测器,在1029 nm处的量子效率约为1064 nm处的三倍(8%)。UNSFS与激光器的光谱匹配关系如图5所示。
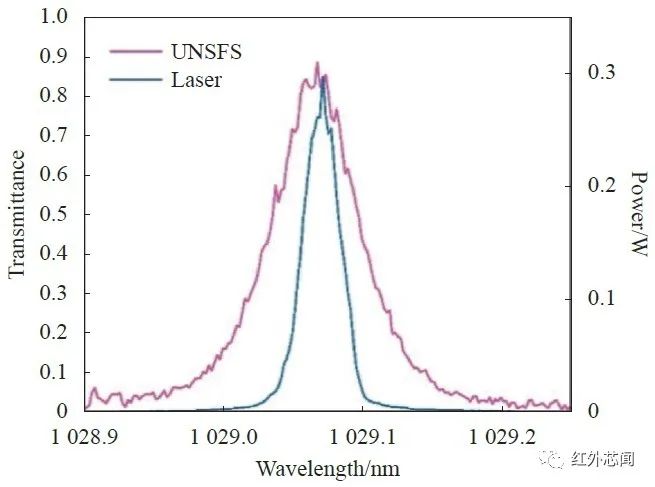
图5 UNSFS与激光器的光谱匹配关系
图5中,蓝线为滤波器的透过率曲线,FWHM 约为50 pm,中心透过率超过85%,中心波长为1029.07 nm;红线为激光器的光谱功率,其FWHM约为25 pm,两者可以有效配合。
基于该UNSFS搭建了一个单光子激光雷达,系统结构如图6所示。激光重复频率为1.6 kHz,单脉冲能量为20 μJ,脉冲宽度为2 ns,发射束直径为1 mm,发散角为1.08 mrad,光学接收径为25 mm,接收视场为1.3 mrad。透镜收集的光线通过针孔后进入UNSFS,滤波后透射光线耦合到芯径为100 μm的多模光纤中,然后进入单光子探测器。激光的发射和接收光束由带有中心孔的反射镜进行空间合束,在中心孔旁边放置PIN探测器作为发射脉冲同步信号源。
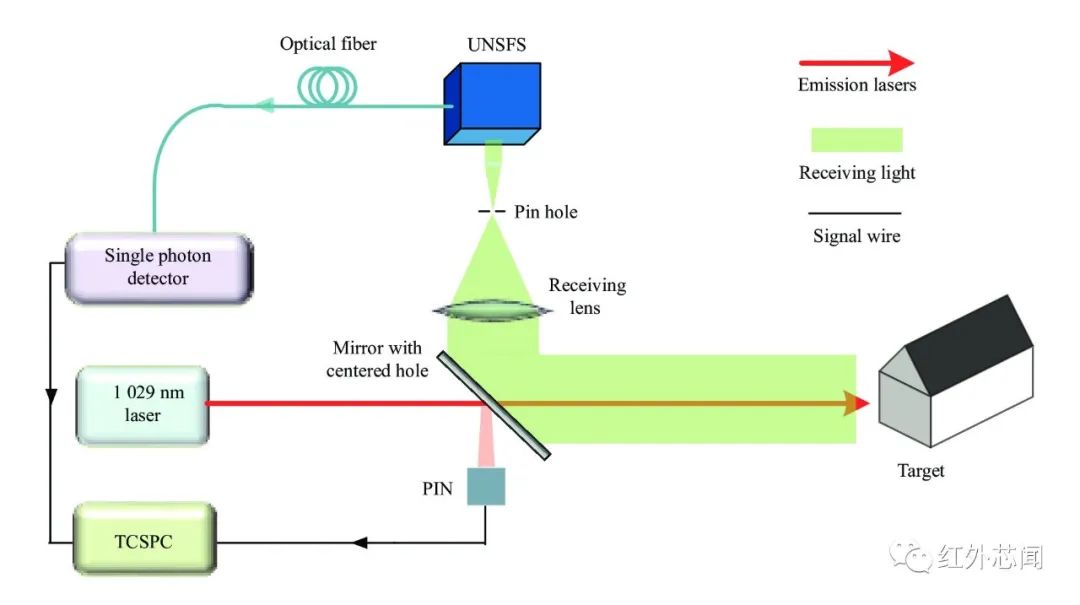
图6 单光子激光雷达系统结构
完成雷达系统搭建后,首先进行了单点测距实验,实验目标选择为实验室所能观测到最远的目标——成都市东侧的龙泉山脉,从地图上得知该山脉距离实验地点的直线距离约为25 km。实验时天气晴朗,能见度约22 km。从上午10点到晚上10点,每小时进行一次探测,检测积累时间为1 s (1600次),时间门宽度为16 ns,结果如图7所示。
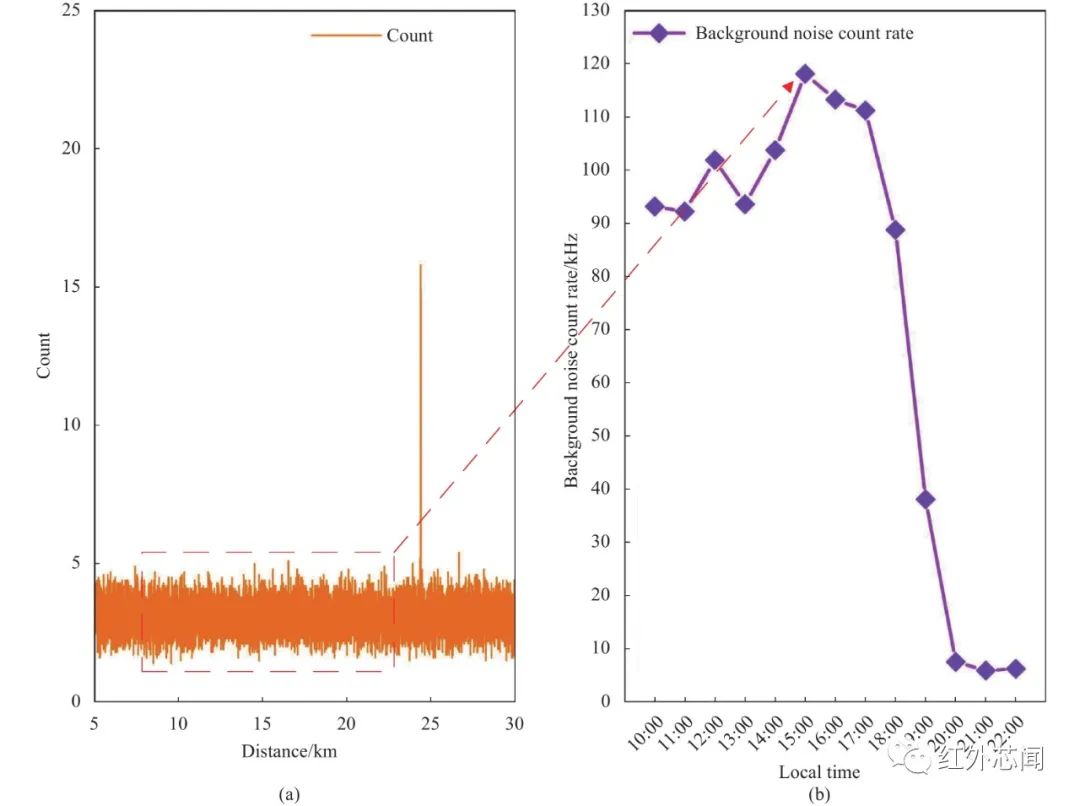
图7 (a)激光雷达回波光子计数距离直方图;(b)背景噪声计数率
图7(a)为激光雷达回波光子计数距离直方图,图7(b)为每次探测的背景噪声计数率(BNCR)统计。由图可见,目标实测距离为24.35 km,目标回波信号累积光子计数为16,此时背景光条件下的平均噪声计数(ANC)为3.06,噪声计数标准差为0.54。
在强烈背景光条件下,激光雷达系统也拥有非常高的信噪比,该系统在全天最大的背景噪声计数率仅为119 kHz,远低于其他的光子计数激光雷达系统(一般为几MHz量级或者更多)。该实验能够证明采用新型UNSFS激光雷达系统拥有良好的日间工作能力。在完成了远距离测距实验后,利用一个可二维角度调节的反射镜完成了对城市区域的快速扫描三维成像实验,系统实物如图8所示。
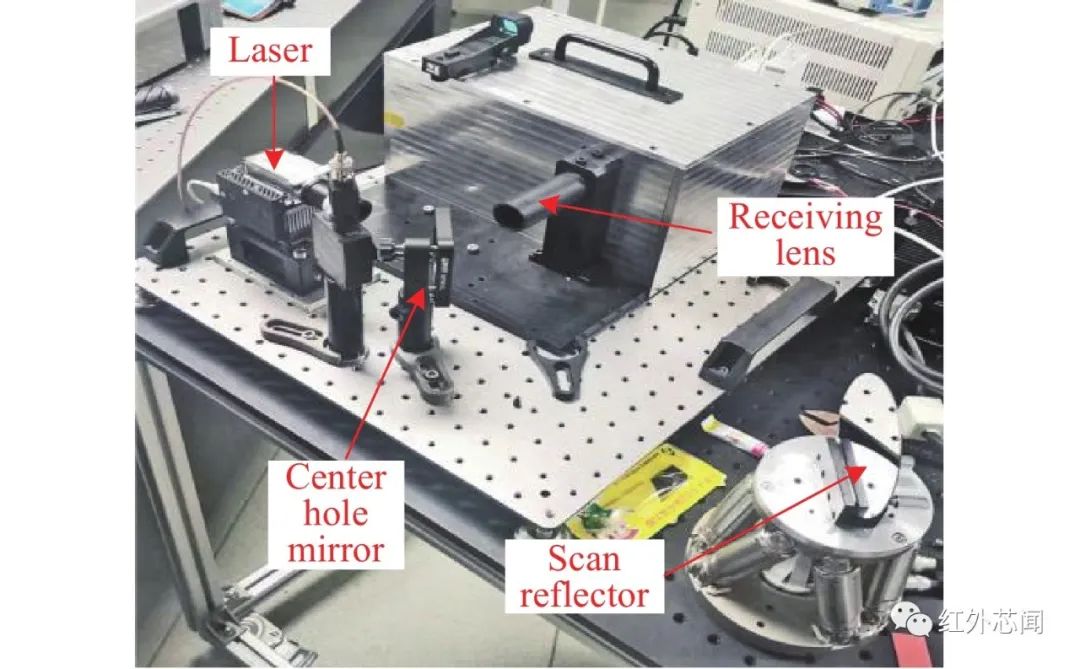
图8 单光子激光雷达及扫描系统实物图
扫描的目标选择了成都市的地标建筑——成都金融城双子塔,该建筑有着较为明显的几何特征。实验时间选择在下午4点阳光强烈的时刻,当天能见度约为10 km,整个扫描视场为1°×1°,扫描的图像分辨率为100×141。得益于该系统优异的背景噪声抑制能力,使得整个探测扫描的时间大为缩短,这对于远距离三维成像来说至关重要。整个扫描时间为85 s,单点累加时间约为6 ms。扫描结果如图9所示。
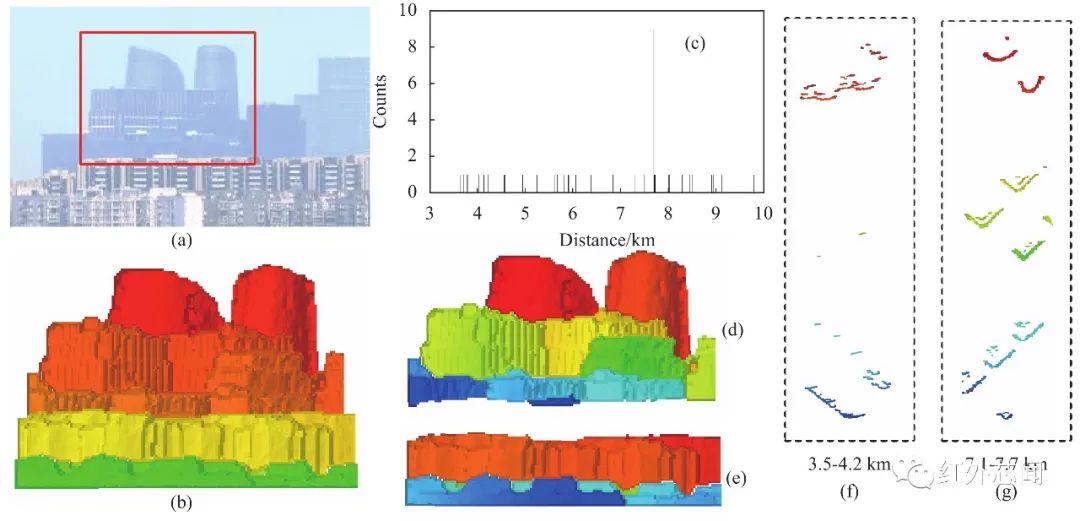
图9 快速扫描三维成像实验结果
图9(a)为在实验室由光学相机拍摄到的目标照片,红色线框为激光雷达扫描区域;图9(b)为扫描全景三维点云图像;图9(c)为单个像素在6 ms累加时间下的光子计数直方图;图9(d)为7.1~7.7 km远景三维点云图;图9(e)为3.5~4.2 km近景三维点云图;图9(f)和图9(g)分别为近景和远景区域顶视图。从结果中可以看出,整个点云图分布在3.5~7.7 km范围,能够非常精细地展示出双子塔的表面轮廓(细节处有穿透成像),同时前方建筑群的细节也能够得到有效的展现,证明了该系统能够出色完成日间强烈背景光条件下的快速三维成像。
激光雷达系统评价模型
在完成了激光雷达的系统搭建和测试实验后,考虑对其探测性能进行评估。人们一般习惯用最大探测距离来评价,然而对于激光雷达系统来说,简单地增加接收光学孔径和发射激光功率总是可以获得更远的探测距离,但这不可避免地会带来对系统资源的更多需求,给雷达的实际应用带来困难。这里引入经济学的概念,体积、质量、功耗等系统资源对于一台激光雷达来说可以认为是各种“投资”,而“回报”就是最大探测距离。在经济学上,人们追求更高的投资回报率(ROI),对于激光雷达系统同样也应如此。为此,文中提出了一种激光雷达性能评估模型,该模型将激光雷达系统的“投资”参数进行归一化,以此来评价一个激光雷达系统是否更经济,即投入更少的系统资源能否获取更远的探测距离。
对于一个激光雷达系统而言,其光学接收面积和激光发射功率无疑都属于“投资”,而且探测时间也是应考虑的一种时间“投资”。对于激光雷达探测的“回报”,通常习惯以最大探测距离作为评价,并且考虑到距离项在激光雷达方程中是以平方形式给出的,因此,将最大探测距离的平方作为激光雷达系统的“回报”。除了上述参数外,激光雷达的最大探测距离还与传输路径的衰减和目标的有效散射截面有关,但它们都属于外部影响因素,而这里只对激光雷达系统本身进行评估,在此评估模型中不对它们进行考虑。
由此,可以通过在单位接收面积、单位发射功率和单位探测时间情况下系统的最大探测距离平方来得到激光雷达的ROI指数。ROI指数越高,激光雷达的探测效率就越高,或者说激光雷达探测更为“经济”。
需要指出的是,对于N×M面阵探测激光雷达,其单像素探测时间为T/(N×M),而T是其单帧的探测时间。可见,对于面阵探测激光雷达,通过一次探测即可同时获得N×M个像素点的距离值,从而缩短了探测时间。然而,为了保证N×M个像素的同时探测,它必将以更高的发射总功率或更大的接收面积为代价。同样,对于单点激光雷达,它减少了对发射功率或接收面积的需求,但同时付出的是需要扫描N×M个点才能完成三维成像的时间代价。
另外,线性探测激光雷达可以用一个脉冲即完成测量,而光子计数激光雷达要积累一定数量的脉冲才能识别目标获得测量值,这也可以看作是对探测时间上不同的“投资”。
为了展示ROI指数的评估效果,这里除了上文提出的新型单光子激光雷达外,还选择了四个具有代表性的光子计数激光雷达系统作为参考进行评估。表3中,系统1是英国赫瑞·瓦特大学的远距离单光子扫描成像系统,能够在800 m~10.5 km (夜间工作)的范围内获取3D图像。系统2是NASA ATLAS系统,部署在ICESat-2卫星上,轨道高度500 km,用于对地观测,它可以昼夜工作。系统3是中国科学技术大学的单光子3D成像激光雷达系统,该系统在夜间获得了202 km距离的扫描3D成像,并在21.6 km处进行了白天3D成像实验(系统4)。系统5是上文提出的新型单光子激光雷达系统。
需要指出的是,对于上文提出的新型单光子激光雷达系统,在以上评估中使用的探测距离值仅仅是一个实际探测实验中的距离值,而远远不是该激光雷达的最大可探测距离。此外,表3中使用的数据都来自公开发表的文献,并不代表这些激光雷达系统的实际最大可探测距离。因此,表3中计算的ROI指数仅供参考,并不表示这些系统所能达到的实际指数。
表3 不同激光雷达系统ROI指数对比

另外,对于三维成像激光雷达,利用基于目标空间关联性的各种算法可以有效减少单像素的累积时间,从而提高系统的ROI指数。对于图9中的3D成像,由于每个单像素的探测信噪比已经足够好,没有应用任何其他关联算法。
结论
文中从单光子激光雷达的探测原理出发,分析了全天时工作对单光子激光雷达探测系统的需求,尤其是白天探测时所面临的背景噪声水平,对比了几种采用主流探测波长和探测器时激光雷达的探测性能。条件允许时,超导纳米线单光子探测器会有较大优势,除此之外,综合考虑目前的器件水平以及日光辐射、大气散射等影响,采用1 μm波段作为探测波长和硅基的单光子探测器,会带来更好的全天时探测性能。
在此基础上,文中采用反射式布拉格光栅作为核心滤波器件,研制了一个超窄带激光雷达光谱滤波系统(50 pm带宽),配合使用窄线宽1029 nm脉冲激光器(25 pm线宽)作为光源,搭建了一套新型的全天时单光子激光雷达系统。利用该激光雷达在城市复杂大气环境中完成了24.35 km的测距与全天时噪声水平的测试实验。随后完成了3.2~7.7 km的高动态快速三维扫描成像实验。实验结果表明,该系统能够在强烈背景光条件下出色地完成探测任务,能够极大地提升单光子激光雷达的全天时探测能力,为白天工作的激光雷达提供了一种全新的实用解决方案。
此外,为了对实际激光雷达系统的性能进行评价,类比经济学中的“投资回报率”概念,提出了一种激光雷达评价模型,即ROI指数,该指数能够十分直观地对各种激光雷达系统探测性能进行评价,可作为一种通用的激光雷达性能评价标准。所提出的新型单光子激光雷达的ROI指数为6.03×10¹⁴,是一个相当高的分数。
审核编辑:刘清
-
激光雷达分类以及应用2017-09-19 8730
-
常见激光雷达种类2017-09-25 13816
-
消费级激光雷达的起航2017-12-07 7302
-
固态设计激光雷达2018-01-25 8383
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 6117
-
TOF激光雷达2019-06-07 8995
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5566
-
拆解的固态激光雷达有了这些新发现2020-05-20 5993
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 41507
-
激光雷达2021-01-17 20003
-
基于全天时单光子激光雷达背景噪声抑制技术2022-12-16 3341
-
1030 nm单光子探测激光雷达技术研究2023-11-25 3054
-
短波红外单光子激光雷达研究进展2023-12-04 1372
-
单光子激光雷达:航空遥感技术的革命性突破2024-11-09 35180
-
使用单光子探测技术设计的数字混沌激光雷达系统2024-11-13 31393
全部0条评论

快来发表一下你的评论吧 !
