

基于Simulink的纯电动汽车再生制动模型搭建
汽车电子
描述
电动汽车制动力分配策略的研究,无外乎在考虑ECE制动法规、电机峰值转矩限制以及电池充放电特性的条件下,对前后轴制动力分配策略理论进行改善。本文研究的是四轮驱动的电动汽车,搭建基于Simulink的纯电动汽车再生制动模型。
1、理想制动力分配控制策略
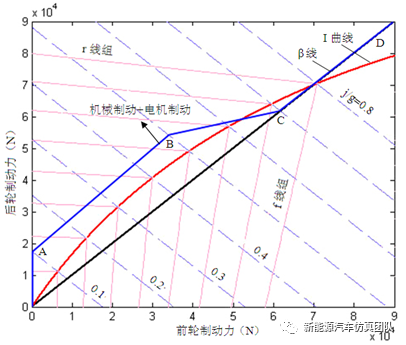
理想制动力分配控制策略,其字面意思就是按照理想制动力分配曲线(即I曲线)来分配汽车的前后轴制动力。传统汽车前后轴的制动力分配是一个固定值,即制动力分配系数为定值,但对于加入电机制动的电动车,这里则是实时按照I 曲线来确定制动力分配系数的值。
电动汽车应用这种制动力分配的控制策略最大的优点则是可以充分利用地面附着力,并且在制动过程中也能保证很好的制动效能,保证制动时行车的安全。其次,我们在保证制动效能的同时,通过电机的制动力,也能在很大程度上提高制动能量的回收。在电动车,若后轴要求的总制动力小于电机能够提供的制动力时,则只对后轴进行电机制动,而前轴的机械制动力则会按照I 曲线来分配,若后轴要求的总制动力大于电机能够提供的制动力时,首先保证电机制动力为最大,然后分配后轴机械制动力,最后分配前轴机械制动力。这样保证制动能量被更多的回收,应充分的发挥电机的制动作用。
此控制策略优点很明显,但由于需要实时根据车速、SOC、制动强度Z等信号来改变分制动力分配系数,策略较复杂,综合考虑,工程上难以实际运用。
2、最大化能量回收控制策略
汽车在ECE法规要求下,为保证制动时方向的稳定性和有足够的制动效能,前轴利用附着系数曲线则应始终在后轴利用附着系数曲线的上方,按照此要求,得到ECE法规曲线。基于理想制动力分配曲线(I曲线)、横轴、f线以及ECE法规曲线所围成的区间,在区间内取合适的点,然后将电机制动的比例控制到最大化,尽可能来利用电机制动力,以保证制动能量回收率达到最大。
当电机制动力大于ECE法规的允许制动力,电机制动力取ECE法规规定的最大值,如果电机制动力大于理想配曲线规定的制动力,但小于ECE 法规的允许制动力,电机制动力取实际输出的最大值。如果电机制动力小于理想曲线规定的制动力,则启动机械制动进行弥补,前后轴的制动力满足理想分配曲线,如果电机制动力超过了ECE分配线或者前轮抱死的曲线,即超过了制动系统允许的最大制动力,则应将电机制动力控制在其允许的最大值。
这种控制策略之下需要同时控制制动器和电机的运转,控制复杂,系统响应慢,很难实现。
3、并联分配控制策略
并联制动系统包括机械制动和电机制动,它是在传统机械制动系统下,在驱动轴中加入一套电机制动系统。而在整个的制动过程中,电动汽车前后轴的总制动力也始终按照固定的制动力分配系数来分配。同时、平行地产生制动力是这种制动力控制策略最大的不同。
总的来说,由于并联制动系统只需要在原来的机械系统中加入一套电机制动系统,所以,对比前面两种策略,并联制动系统在控制系统上较简单且更容易实现,而且,原来机械系统的保留,也使制动时车辆的安全性得以保证。当制动减速度要求比较小,小于一个给定的值,如a/g=0.15时,制动系统将执行电机制动,当制动时减速度较大时,如a/g>0.7时,为保证电动汽车在制动过程的安全性和稳定性,此时只执行机械制动,而当0.15





















- 相关推荐
- 热点推荐
- 电动汽车
- 电机控制器
- PWM信号
- simulink仿真
- 电池SOC
-
变频再生制动的方法2026-03-07 1032
-
无刷直流电机电动汽车再生ABS双闭环控制研究2025-06-26 619
-
小白求助,请问怎么实现基于Simulink的电动汽车再生制动仿真建模?2021-10-13 1175
-
基于MATLAB/Simulink的电动汽车再生制动仿真2021-08-30 1466
-
如何对电动汽车再生制动进行仿真?2021-07-07 1424
-
基于Simulink的电动汽车再生制动仿真建模设计2021-06-28 1365
-
再生制动是什么,对于电动汽车的作用是什么2020-05-04 4259
-
如何使用ECE法规进行电动汽车再生制动控制策略的建模与仿真2020-01-06 1981
-
对于电动汽车而言再生制动技术有什么作用2019-12-08 2306
-
再生制动系统对于电动汽车而言有什么用2019-10-29 2044
-
电动汽车的电动机再生制动大揭秘2019-02-12 6462
-
四驱电动汽车再生制动力控制策略研究2018-03-08 1462
-
什么是电动汽车再生制动能量回收控制系统2010-03-17 7196
全部0条评论

快来发表一下你的评论吧 !
